
Как летает вертолет. | АВИАЦИЯ, ПОНЯТНАЯ ВСЕМ.
Здравствуйте, друзья!

МИ-1. Первый серийный вертолет в СССР.
А действительно интересно, как летает вертолет? Как этот удивительный (без преувеличения ) летательный аппарат не только держится в воздухе, но и красиво летает. Еще как красиво! Я неоднократно был свидетелем пилотажа серийного боевого вертолета МИ-24 над аэродромом города Бжег в Польше. Вертолет уже заслуженный ветеран, но грозная боевая машина, отлично зарекомендовавшая себя в Афганистане, и летает так, что дух захватывает, и взгляд оторвать от этого действа невозможно.
Так что же позволяет ей это делать? Ведь вроде бы несуразный по сравнению с самолетом летательный аппарат. Рискуя в который раз повторить самого себя скажу, что на самом деле принцип полета вертолета достаточно прост. И кое-что для его объяснения мы уже знаем.
Слышали, наверное, расхожее выражение «винтокрылая машина»? Оно достаточно правильное. Самолет держит в воздухе крыло, а у вертолета эти функции выполняет винт большого диаметра. Его называют несущим винтом. Каждая лопасть несущего винта представляет собой, по сути дела, крыло, имеющее аэродинамический профиль, и движущееся при вращении винта в воздушном потоке. Вот, пожалуй, принципиально и все :-). Что при этом происходит с крылом мы с Вами уже разобрались здесь и здесь. Возникает аэродинамическая сила, приложенная к каждой лопасти и, как их сумма, общая сила приложенная к винту и через него ко всему вертолету. Сила эта всегда перпендикулярна плоскости вращения винта.
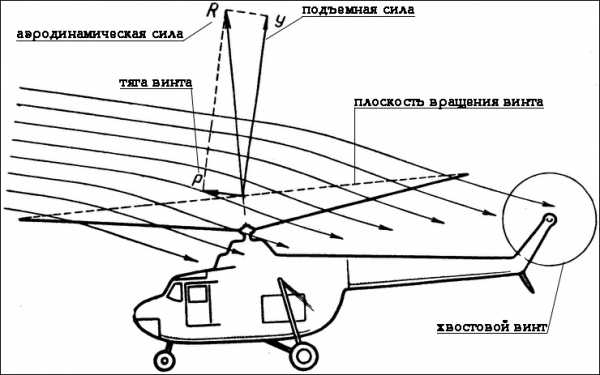
Силы, действующие на вертолет.
Если она направлена вверх и больше веса вертолета, то он поднимается вертикально, если она равна весу, то он зависает в воздухе. Просто, неправда ли? Но теперь Вы вправе спросить, а как же вертолет двигается вперед? Ведь никакого горизонтального винта, как , например у винтового самолета у него нет и реактивного двигателя тоже. Что же создает ему тягу?
Как всегда все элементарно :-). Эту роль выполняет все тот же несущий винт. Если плоскость вращения винта наклонить, то вместе с ней наклонится и суммарная аэродинамическая сила. И теперь ее можно будет разложить на две составляющие: вертикальную, которая поднимает вертолет вверх и держит его в воздухе и горизонтальную, которая заставляет его двигаться вперед. Хотя правильней сказать не вперед, а туда, куда она направлена. Можно и вбок или назад, что вертолет с успехом и делает, кстати.
Вот, собственно, и все. На вопрос о том, как летает вертолет мы ответили. Конечно теория и практика этого вопроса значительно сложнее, но общий принцип полета именно таков.
Скажу, что на самом деле несущий винт вместе с массивной осью и тяжелыми сопутствующими механизмами никуда не отклоняется. Это, мягко говоря, трудно осуществимо и технически нецелесообразно. И тем не менее плоскость вращения винта наклоняется. Говоря вертолетным языком создается «перекос винта». Достигается он за счет изменения положения лопастей, которые подвешены к оси на специальных шарнирах, а управляет этим процессом специальное устройство, называемое «автомат перекоса несущего винта». Все, вертолет полетел… И именно туда, куда нам нужно.

КА-52 Аллигатор. Хвостового винта нет.
Всех эти заумных понятий мы еще очень популярно (и незаумно :-))коснемся в дальнейших наших разговорах, а сейчас я напоследок еще упомяну об одной необходимой вещи. Вы наверняка все видели у вертолетов маленький хвостовой винт и задавали себе вопрос: «Для чего он?». Отвечаю. Я думаю все, даже ярые нелюбители физики слышали про три закона Ньютона. А если не слышали, то поверьте мне на слово, я знаю, что говорю :-). Так вот третий закон в популярной форме гласит: «Каждое действие равно противодействию.» Именно согласно этому выражению возникает так называемый реактивный момент. То есть если несущий винт вертолета вращается, например, вправо, этот момент будет стремиться повернуть корпус вертолета влево (или же наоборот). Чтобы устранить эту совсем ненужную тенденцию и существует хвостовой винт. Он работает, как обычный тянущий самолетный винт и, создавая тягу, обратную реактивному моменту просто его уравновешивает. А если вертолету нужно повернуть, то тяга этого винта меняется за счет поворота его лопастей.
Есть достаточно вертолетов без хвостового винта. Это, например, всем известные КА-50 и КА-52. Но у них на одной оси как бы два несущих винта. И вращаются они в разные стороны, тем самым уравновешивая вредный реактивный момент.
Все. Сказано уже более чем достаточно. Теперь если Вас спросят как летает вертолет, Вы без труда сможете на этот вопрос ответить. И я Вам советую присмотреться к современным типам этого летательного аппарата. Они сейчас развились в некий тип, стоящий в определенном смысле особняком от традиционной авиации и иной раз просто завораживают своим видом и своими возможностями… Хотя, впрочем, продолжение следует…
P.S. Напоследок маленький ролик с участием МИ-24. Не российского, к сожалению. Вот так люди заботятся о технике, тем более такой заслуженной. Второй ролик – пилотаж Ми-24.
Фото и картинки кликабельны.
No related posts.
avia-simply.ru
Как летает вертолет
Вертолеты летают, потому что у них крутятся длинные лопасти несущего винта, чьи поперечные сечения по форме похожи на сечение самолетных крыльев. Подъемная сила вертолетных лопастей может меняться, если изменять угол наклона всех лопастей одновременно.
А различные повороты машины выполняются при помощи изменения наклона отдельно каждой лопасти при ее вращении. Если надо лететь вперед или назад, поворачивать налево или направо, вращающийся несущий винт поворачивают в направлении желаемого маневра.
В хвостовой части вертолета установлен еще один, небольшой вспомогательный несущий винт. Он нужен для того, чтобы, вращаясь, уравновешивать такое действие главного винта, которое могло бы привести к закручиванию всего вертолета вокруг его вертикальной оси. Другими словами, вспомогательный винт позволяет машине стабильно держаться в воздухе. Кроме всего прочего, вертолеты могут неподвижно зависать в воздухе. Для<» этого требуется, чтобы вес машины оказался равен подъемной силе, создаваемой несущим винтом.
Главный несущий винт
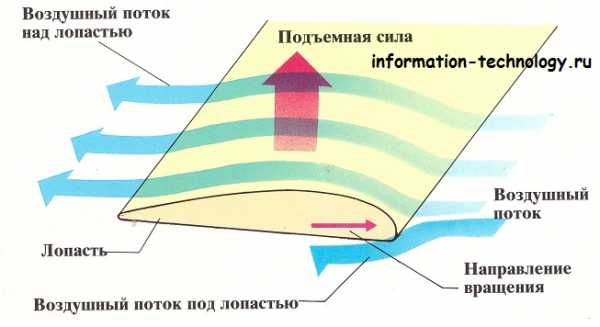
В поперечном сечении лопасть главного несущего винта похожа на крыло самолета. Воздушный поток, обтекая верхнюю и нижнюю поверхность лопасти, создает над ней пониженное давление и рождает подъемную силу.
Вспомогательный несущий винт
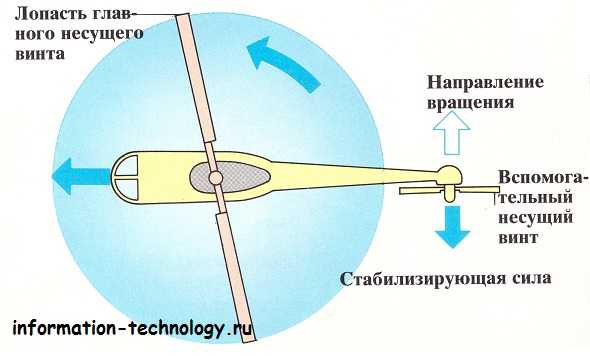
Сила, возникающая при вращении главного винта, стала бы раскручивать весь вертолет, если бы не было стабилизирующего эффекта от работы вспомогательного винта, расположенного на хвосте.
Втулка главного несущего винта
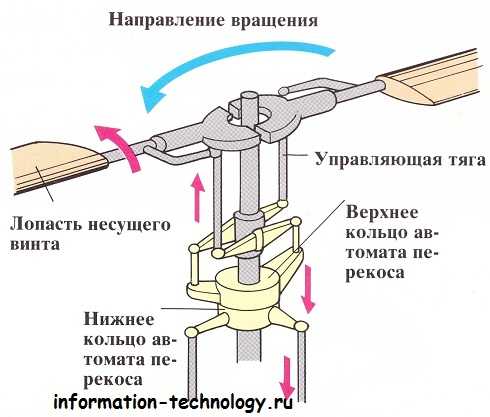
Чтобы вертолет был стабилен в полете, пилот устанавливает нужный угол лопастей главного винта. Для этого служит устройство, известное как кольцо автомата перекоса. Оно укреплено на валу несущего винта. Вертолет может лететь, кружить или неподвижно парить в воздухе в соответствии с тем, как пилот установит это кольцо. Ниже на рисунке показаны перемещения кольца вверх и вниз, которые приводят к изменению наклона лопасти винта. Кроме того, кольцо автомата перекоса можно наклонять, чтобы изменить угол наклона винтового диска.
Пилотирование вертолета
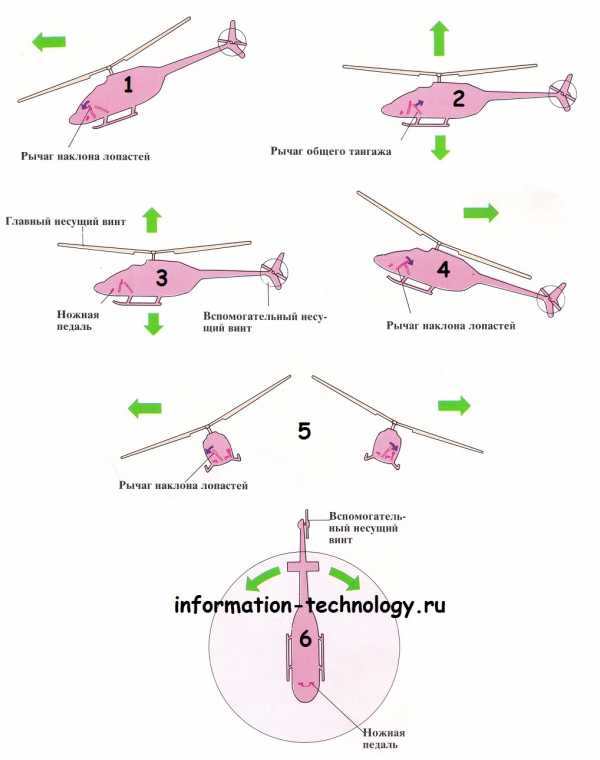
1. Чтобы лететь вперед, пилот толкает рычаг управления от себя. При этом винтовой диск наклоняется к носу.
2. Чтобы набирать высоту, пилот увеличивает общий тангаж всех лопастей, пока подъемная сила не превзойдет силу тяжести.
3. Чтобы висеть неподвижно, пилот удерживает такой угол наклона винта, чтобы подъемная сила и сила тяжести были равны.
4. Чтобы дать задний ход, пилот наклоняет винтовой диск по направлению к хвосту.
5. Чтобы повернуть, пилот поворачивает винтовой диск влево или вправо.
6. Чтобы изменить курс, пилот устанавливает нижний угол наклона лопастей вспомогательного винта.
information-technology.ru
Автомат перекоса вертолета. Общий принцип управления.
Привет, друзья!

Втулка несущего винта с автоматом перекоса вертолета МИ-8.
Снова вернемся к нашим вертолетам :-), этим красивым и удивительным (несмотря на их кажущуюся сегодня обычность) аппаратам. Поговорим немного подробнее о принципах их управления.
В статье «Как летает вертолет» я этого уже коснулся. Для того чтобы вертолет двигался поступательно, нужен перекос винта, и создает его такой агрегат, как автомат перекоса вертолета. Вот о нем сегодня и поговорим.
Как известно для вертолета полная аэродинамическая сила — это сумма всех сил, действующих на каждую лопасть в отдельности. Силы эти я бы разделил на искусственные и на естественные.
О естественных. Каждая лопасть имеет определенный вес. Поэтому при вращении с достаточно большой скоростью на нее действует центробежная сила. Есть еще сила сопротивления и конечно подъемная сила лопасти. Вот эту самую подъемную силу вполне можно корректировать силами искусственными. А это как раз и делает автомат перекоса винта вертолета. От него к каждой лопасти протянута специальная тяга, с помощью которой изменяется угол установки лопасти, то есть по сути дела угол атаки и, как следствие, подъемная сила.
Лопасти несущего винта, описывая полный круг вокруг оси при его вращении, обтекаются встречным потоком воздуха по-разному. Полный круг – это 360º. Тогда примем заднее положение лопасти за 0º и далее через каждые 90º полный оборот. Так вот лопасть в интервале от 0º до 180º — это лопасть наступающая, а от 180º до 360º — отступающая. Принцип такого названия, я думаю, понятен. Наступающая лопасть движется навстречу набегающему потоку воздуха, и суммарная скорость ее движения относительно этого потока возрастает потому что сам поток, в свою очередь, движется ей навстречу. Ведь вертолет летит вперед. Соответственно растет и подъемная сила. (Для примера приведу пояснительный рисунок из «заслуженной» ? книги об управлении вертолетом МИ-1.)

Изменение скоростей набегающего потока при вращении винта для вертолета МИ-1 (средние скорости полета).
У отступающей лопасти картина противоположная. От скорости набегающего потока отнимается скорость, с которой эта лопасть как бы от него «убегает» :-). В итоге имеем подъемную силу меньше. Получается серьезная разница сил на правой и левой стороне винта и отсюда явный переворачивающий момент. При таком положении вещей вертолет при попытке движения вперед будет иметь тенденцию к переворачиванию. Такие вещи имели место при первом опыте создания винтокрылых аппаратов.
Чтобы этого не происходило, конструктора применили одну хитрость. Дело в том, что лопасти несущего винта закреплены во втулке (это такой массивный узел, насаженный на выходной вал), но не жестко. Они с ней соединены с помощью специальных шарниров (или устройств, им подобных). Шарниры бывают трех видов: горизонтальные, вертикальные и осевые.
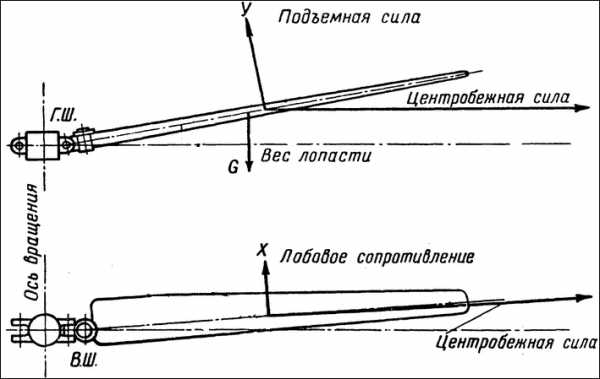
Силы, действующие на лопасть, подвешенную ко втулке винта на шарнирах.
Теперь посмотрим что же будет происходить с лопастью, которая подвешена к оси вращения на шарнирах. Итак, наша лопасть вращается с постоянной скоростью без каких-либо управляющих воздействий извне.
От 0º до 90º скорость обтекания лопасти растет, значит растет и подъемная сила. Но! Теперь лопасть подвешена на горизонтальном шарнире. В результате избыточной подъемной силы она, поворачиваясь в горизонтальном шарнире, начинает подниматься вверх ( специалисты говорят «делает взмах»). Одновременно из-за увеличения лобового сопротивления (ведь скорость обтекания возросла) лопасть отклоняется назад, отставая от вращения оси винта. Для этого как раз и служит вертикальный шарнир.
Однако при взмахе получается, что воздух относительно лопасти приобретает еще и некоторое движение вниз и, таким образом, угол атаки относительно набегающего потока уменьшается. То есть рост избыточной подъемной силы замедляется. На это замедление оказывает свое дополнительно влияние отсутствие управляющего воздействия. Это значит, что тяга автомата перекоса, присоединенная к лопасти, сохраняет свое положение неизменным, и лопасть, взмахивая, вынуждена поворачиваться в своем осевом шарнире, удерживаемая тягой и, тем самым, уменьшая свой установочный угол или угол атаки по отношению к набегающему потоку. (Картина происходящего на рисунке. Здесь У – это подъемная сила, Х – сила сопротивления, Vy – вертикальное движение воздуха, α – угол атаки.)
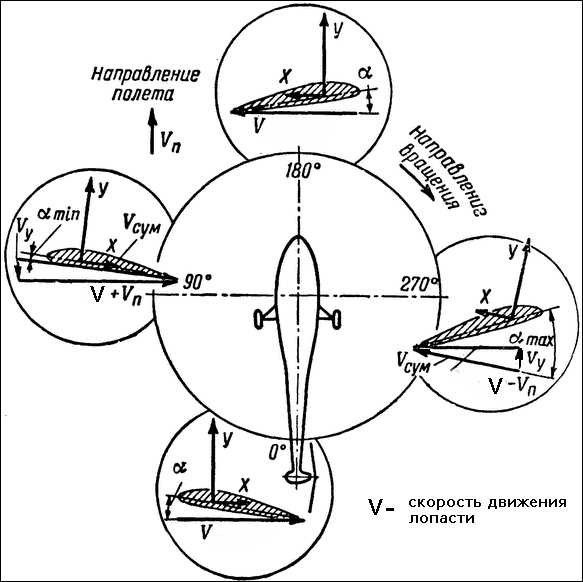
Картина изменения скорости и угла атаки набегающего потока при вращении лопасти несущего винта.
До точки 90º избыточная подъемная сила будет продолжать расти, однако из-за вышесказанного со все большим замедлением. После 90º эта сила будет уменьшаться, но из-за ее присутствия лопасть будет продолжать двигаться вверх, правда все медленнее. Максимальную высоту взмаха она достигнет уже несколько перевалив за точку 180º. Это происходит потому, что лопасть имеет определенный вес, и на нее действуют еще и силы инерции.
При дальнейшем вращении лопасть становится отступающей, и на нее действуют все те же процессы, но уже в обратном направлении. Величина подъемной силы падает и центробежная сила вместе с силой веса начинают опускать ее вниз. Однако при этом растут углы атаки для набегающего потока (теперь уже воздух движется вверх по отношению к лопасти), и растет установочный угол лопасти из-за неподвижности тяг автомата перекоса вертолета. Все происходящее поддерживает подъемную силу отступающей лопасти на необходимом уровне. Лопасть продолжает опускаться и минимальной высоты взмаха достигает уже где-то после точки 0º, опять же из-за сил инерции.
Таким образом, лопасти вертолета при вращении несущего винта как бы «машут» или еще говорят «порхают». Однако это порхание вы, так сказать, невооруженным взглядом вряд ли заметите. Подъем лопастей вверх (как и отклонение их назад в вертикальном шарнире) очень незначительны. Дело в том, что на лопасти оказывает очень сильное стабилизирующее воздействие центробежная сила. Подъемная сила, например, больше веса лопасти в 10 раз, а центробежная – в 100 раз. Именно центробежная сила превращает на первый взгляд «мягкую» гнущуюся в неподвижном положении лопасть в жесткий, прочный и отлично работающий элемент несущего винта вертолета.
Однако несмотря на свою незначительность вертикальное отклонение лопастей присутствует, и несущий винт при вращении описывает конус, правда очень пологий. Основание этого конуса и есть плоскость вращения винта.

Силы, действующие на вертолет.
Теперь главная мысль :-). В известной статье я уже говорил, что для придания вертолету поступательного движения нужно эту плоскость наклонить, дабы появилась горизонтальная составляющая полной аэродинамической силы, то есть горизонтальная тяга винта. Иначе говоря, нужно наклонить весь воображаемый конус вращения винта. Если вертолету нужно двигаться вперед, значит конус должен быть наклонен вперед.
Исходя из описания движения лопасти при вращении винта, это означает, что лопасть в положении 180º должна опуститься, а в положении 0º (360º) должна подняться. То есть в точке 180º подъемная сила должна уменьшиться, а в точке 0º(360º) увеличиться. А это в свою очередь можно сделать уменьшив установочный угол лопасти в точке 180º и увеличив его в точке 0º (360º). Аналогичные вещи должны происходить при движении вертолета в других направлениях. Только при этом, естественно, аналогичные изменения положения лопастей будут происходить в других угловых точках.
Понятно, что в промежуточных углах поворота винта между указанными точками установочные углы лопасти должны занимать промежуточные положения, то есть угол установки лопасти меняется при ее движении по кругу постепенно, циклично.Он так и называется циклический угол установки лопасти (циклический шаг винта). Я выделяю это название потому, что существует еще и общий шаг винта (общий угол установки лопастей). Он изменяется одновременно на всех лопастях на одинаковую величину. Обычно это делается для увеличения общей подъемной силы несущего винта.
Такие действия как раз и выполняет автомат перекоса вертолета. Он изменяет угол установки лопастей несущего винта (шаг винта), вращая их в осевых шарнирах посредством присоединенных к ним тяг. Обычно всегда присутствуют два канала управления: по тангажу и по крену, а также канал изменения общего шага несущего винта.
Тангаж означает угловое положение летательного аппарата относительно его поперечной оси (нос вверх-вниз :-)), а крен, соответственно, относительно его продольной оси (наклон влево-вправо :-)).
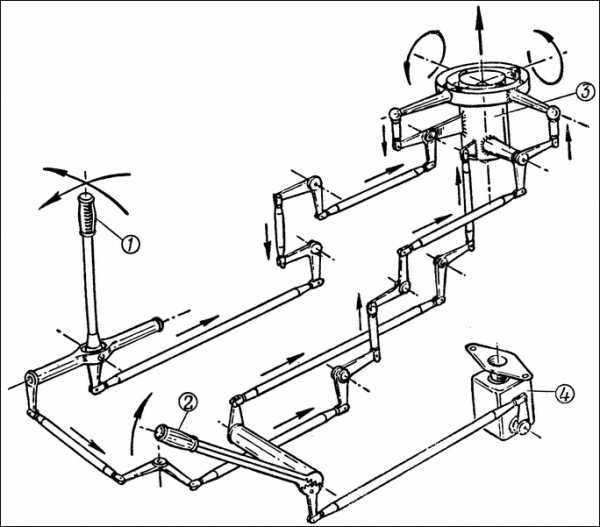
Конструктивно автомат перекоса вертолета выполнен достаточно сложно, но пояснить его устройство вполне можно на примере аналогичного узла модели вертолета. Модельный автомат, конечно, устроен попроще своего старшего собрата, но принцип абсолютно тот же :-).
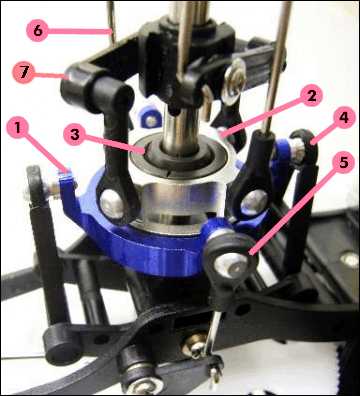
Автомат перекоса модели вертолета.
Это двухлопастной вертолет. Управление угловым положением каждой лопасти осуществляется через тяги 6. Эти тяги соединены с так называемой внутренней тарелкой 2 (из белого металла). Она вращается вместе с винтом и в установившемся режиме параллельна плоскости вращения винта. Но она может менять свое угловое положение (наклон), так как закреплена на оси винта через шаровую опору 3. При изменении своего наклона (углового положения) она воздействует на тяги 6, которые, в свою очередь, воздействуют на лопасти, поворачивая их в осевых шарнирах и меняя, тем самым, циклический шаг винта.
Внутренняя тарелка одновременно является внутренней обоймой подшипника, внешняя обойма которого – это внешняя тарелка винта 1. Она не вращается, но может менять свой наклон (угловое положение) под воздействием управления по каналу тангажа 4 и по каналу крена 5. Меняя свой наклон под воздействием управления внешняя тарелка меняет наклон внутренней тарелки и в итоге наклон плоскости вращения несущего винта. В итоге вертолет летит в нужном направлении :-).
Общий шаг винта меняется перемещением по оси винта внутренней тарелки 2 при помощи механизма 7. В этом случае угол установки меняется сразу на обеих лопастях.
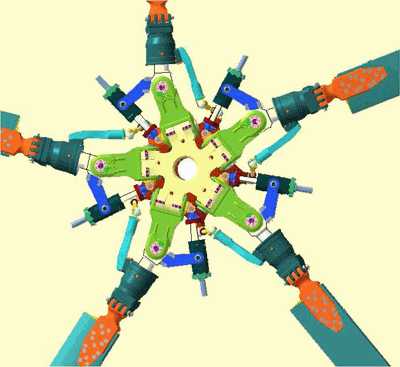
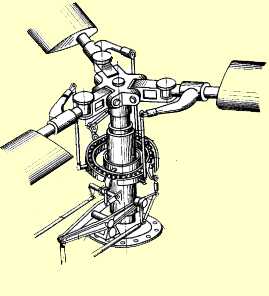
Для более лучшего понимания помещаю еще несколько иллюстраций втулки винта с автоматом перекоса. Комментировать их нет смысла :-)…
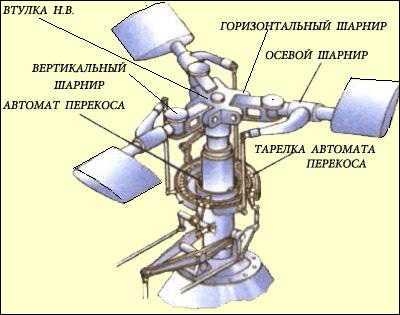
Втулка винта с автоматом перекоса (схема).
Поворот лопасти в вертикальном шарнире втулки несущего винта.
Изменение общего шага винта, лопасти поворачиваются в осевых шарнирах.
Вот пожалуй и все. Как видите, принципиально все достаточно просто. Конечно в практическом плане автомат перекоса вертолета — агрегат сложный, включающий в себя различные специальные узлы и устройства.

Втулка несущего винта с автоматом перекоса вертолета МИ-2.
В одной из следующих статей мы этого коснемся, а также рассмотрим как же непосредственно управляется вертолет из кабины пилота с использованием автомата перекоса и специальных органов управления.
В заключение я предлагаю вам посмотреть два ролика, которые достаточно наглядно иллюстрируют работу автомата перекоса несущего винта. Полезного просмотра и до новых встреч :-)…
Фотографии кликабельны.
Related posts:
- Как летает вертолет.
avia-simply.ru
Управление вертолетом. | АВИАЦИЯ, ПОНЯТНАЯ ВСЕМ.
Здравствуйте!

Взлет МИ-8 в зоне воздушной подушки.
Мы с Вами уже выяснили как, в принципе, управляется вертолет, и как работает автомат перекоса. А сегодня внесем некоторую ясность в вопрос о том, какую роль во всем этом играет пилот. Какие даны ему органы управления для решения вобщем-то непростой задачи, каковой является управление вертолетом
С самолетом все более-менее понятно. У него есть две самостоятельные системы: система управления самолетом (собственно управление рулями и элеронами) и система управления двигателем. И органы в кабине экипажа в количестве трех штук ? : ручка управления самолетом (РУС), ручка управления двигателем (РУД), и педали для управления рулем направления. Как в этом плане обстоят дела у вертолета?…
Начнем с того, что определим более конкретно типы управления вертолетом.
Первое — это вертикальное управление. Осуществляется путем одновременного изменения угла установки лопастей несущего винта (то есть изменением общего шага). Делает это автомат перекоса.
Второе — путевое управление.То есть изменение направления полета. Осуществляется при помощи рулевого (хвостового) винта путем изменения его тяги (то есть изменение общего шага рулевого винта). Если вертолет двухвинтовой схемы (без хвостового винта), то путем изменения крутящего момента одного из винтов. Об этом я уже говорил ранее.
Третий тип — поперечное управление. Это управление вертолетом по крену. Крен создается наклоном плоскости вращения винта (а значит и полной аэродинамической силы винта) в нужную сторону, вправо или влево. При этом появляется боковая составляющая полной аэродинамической силы, обеспечивающая возможность бокового движения вертолета. Кроме того сила тяги винта теперь уже не проходит через центр тяжести вертолета. Поэтому относительно него появляется момент, кренящий вертолет в нужную сторону. Все это тоже прерогатива автомата перекоса.
Ну и четвертый тип управления вертолетом — продольное управление. Это управление вертолетом по тангажу, при этом вертолет летит вперед или назад с соответствующей скоростью. Осуществляется путем наклона плоскости вращения несущего винта и, соответственно, вектора полной аэродинамической силы в продольном направлении, вперед или назад. При этом создается угол тангажа (вертолет опускает или поднимает нос) из-за создания момента наклоненной аэродинамической силы относительно центра тяжести вертолета. Плюс появляется горизонтальная составляющая этой силы, которая, собственно, и движет вертолет в нужном направлении. Главную роль здесь опять же играет автомат перекоса, меняющий циклический шаг винта.
Итак у вертолета есть три главных агрегата, которые определяют его движение. Двигатель, автомат перекоса и рулевой винт. И, собственно, управление вертолетом означает управление этими тремя агрегатами. Для этого существуют три системы: система управления автоматом перекоса (управление циклическим шагом несущего винта), система управления хвостовым винтом и система управления общим шагом винта во взаимодействии с управлением оборотами (мощностью) двигателя, или система «шаг-газ».
Что такое «шаг-газ». Дело в том, что угол установки лопастей несущего винта (общий шаг) и обороты двигателя связаны. Ведь если увеличить угол, то возрастет величина аэродинамических сил, действующих на лопасти. Увеличивается и подъемная сила, и сила сопротивления. Винт, как говорят, нагружается. Двигатель, находясь на определенном уровне мощности не может «обслужить» возросшую нагрузку и может начать терять обороты. Тяга винта, соответственно, может уменьшиться.
Чтобы этого не происходило, была придумана система шаг-газ, которая одновременно с увеличением угла установки лопастей подает команду в топливную автоматику на увеличение оборотов (то есть «увеличиваешь шаг – даешь газ» и наоборот), тем самым исключая падение мощности двигателя.
Теперь о том, что у нас в кабине. У пилота есть собственно две ручки управления вертолетом.
Первая – ручка управления циклическим шагом винта (или просто ручка управления вертолетом). Она самолетного типа, расположена перед креслом пилота, и с ее помощью осуществляется продольное и поперечное управление вертолетом. От нее через специальную систему тяг и качалок воздействие передается на тарелку автомата перекоса, которая, в свою очередь, определяет циклический угол установки лопастей.
Системы управления циклическим и общим шагом винта.

Кабина вертолета. Хорошо видны спаренные ручки управления и ручки шаг-газ.
Вторая – ручка управления общим шагом винта или, как ее еще называют «ручка шаг-газ». Эта ручка обычно расположена слева от кресла пилота и перемещается вертикально вверх-вниз. С ее помощью осуществляется вертикальное управление путем одновременного воздействия на автомат перекоса и систему изменения оборотов двигателя. Обычно обороты двигателя меняются на первой трети перемещения ручки, далее уже меняется только общий шаг винта.
Отдельно от шага винта мощность двигателя может меняться только в небольших пределах для необходимой корректировки. Для этого на ручке шаг-газ существует специальный корректор ( обычно что-то типа поворотного кольца).
На схеме под номерами: 1 — ручка управления циклическим шагом; 2 — ручка шаг-газ; 3 — автомат перекоса; 4 — агрегат системы управления двигателем.
Кроме ручек управления есть еще педали. С их помощью опять же через систему управления вертолетом летчик воздействует на рулевой винт с целью изменения общего шага его лопастей, меняя тем самым, его тягу и, соответственно, разворачивающий момент вертолета.

Система управления шагом рулевого винта.

Кабина вертолета. Хорошо видны ручка управления и правая педаль.
При использовании всех описанных органов управления вертолетом, этот аппарат превращается в маневренную машину с довольно широкими возможностями.
Основные режимы полета вертолета – это взлет, висение, разгон и набор высоты, маневрирование и далее снижение и посадка. Обычные, впрочем, режимы для любого летательного аппарата, за исключением, конечно, висения. Этот режим доступен еще только самолетам с вертикальным взлетом и посадкой (СВВП), не считая, конечно, всякой экзотики :-).
Чуть-чуть подробнее о режиме взлета. Существует два способа взлета. Первый – «по вертолетному». В этом случае вертолет взлетает вертикально с кратковременным зависанием на высоте 1,5-2 метров (контрольное висение), после чего производится разгон с набором высоты. Второй – «по самолетному». При этом вертолет разгоняется на земле, набирает скорость отрыва и взлетает с последующим набором высоты и скорости.
Способ взлета выбирается в зависимости от состояния самого аппарата и от внешних условий. Определяющим в этом плане является запас мощности двигателя, что вполне понятно :-). Этот запас, в свою очередь, зависит от массы вертолета (точнее взлетной массы) и от таких параметров состояния атмосферы, влияющих на параметры работы двигателя и несущего винта, как местное давление воздуха, температура и влажность (влияющие на плотность воздуха).
Взлет по вертолетному.
Кроме того на выбор способа взлета влияет размер и состояние поверхности площадки, на которой находится вертолет, наличие каких-либо препятствий по курсу взлета и обязательно направление и сила ветра у земли.
Чем выше барометрическая высота места взлета (ниже давление), чем выше температура и влажность воздуха, а также чем ниже скорость встречного ветра, тем ниже запас мощности двигателя, и тем ниже должна быть взлетная масса вертолета.
Взлет по вертолетному – это основной вид взлета для современных аппаратов. Он, однако, тоже может иметь различную конфигурацию. Дело в том, что при работе воздушного винта вблизи земли может появиться эффект воздушной подушки. Это явление, я думаю, известно практически каждому современному человеку.
Воздух, отбрасываемый несущим винтом вниз тормозится у земли и образует как бы поддерживающую аппарат подушку. Такое может происходить обычно на совсем малом расстоянии от земной поверхности. Считается, что для вертолета это явление можно принимать во внимание, если расстояние от земли до плоскости вращения винта равно радиусу винта (или меньше). В этом случае прирост подъемной силы составляет 10-15%.
Так вот взлет по вертолетному может осуществляться с разгоном вне зоны воздушной подушки или в ее зоне, а также может осуществляться разгон по наклонной траектории.
Первый случай выбирается тогда, когда взлетная площадка имеет ограниченные размеры и окружена высокими препятствиями, а также если она имеет сильное запыление или покрыта свежевыпавшим снегом. Режим работы двигателя при таком взлете – максимальный то есть запаса по мощности нет.
Это самый напряженный режим взлета, а при отказе двигателя (одного из двигателей) безопасная посадка не гарантирована. Вертикальный подъем должен осуществляться до высоты обеспечения прохода над препятствиями с превышением не менее 5 метров.
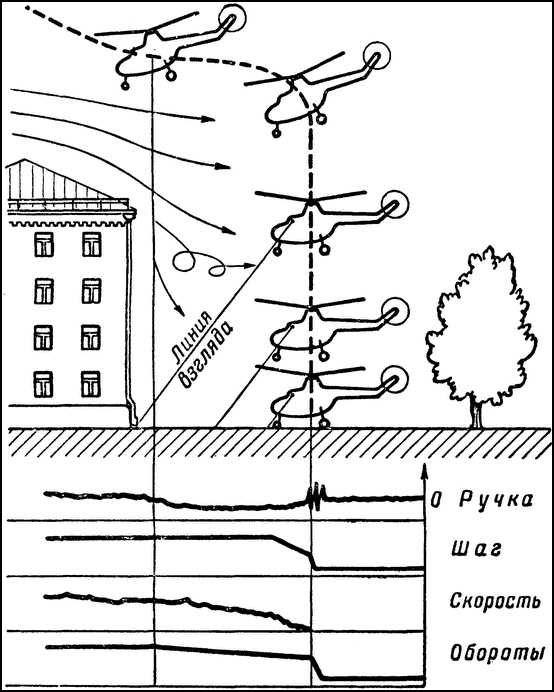
Взлет вне зоны воздушной подушки с площадки, ограниченной препятствиями.
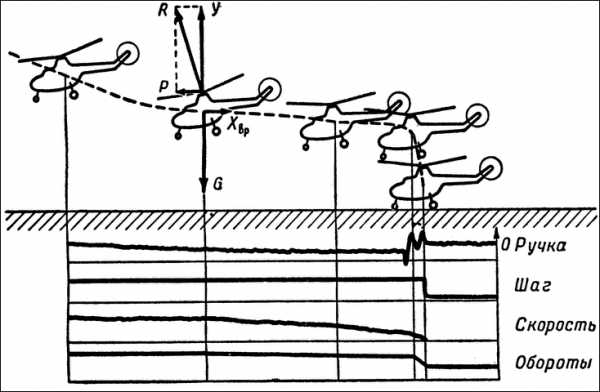
Разгон по наклонной траектории может быть использован на такой же площадке, но с высотой препятствий до 5 метров. Запас мощности при таком взлете должен обеспечивать одновременный разгон с набором высоты. Должна быть гарантирована безопасная посадка в случае отказа двигателя (одного из двигателей).
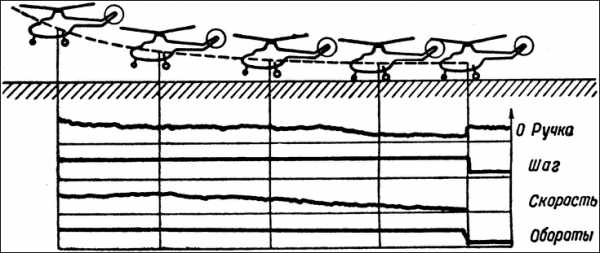
Взлет с разгоном в зоне воздушной подушки – самый распространенный способ взлета. Он обычно производится с аэродромов (вертодромов), имеющих открытые подходы. При этом двигатель работает обычно на номинальном режиме, то есть имеется запас мощности для необходимого, в случае чего :-), маневрирования. Вертолет после контрольного висения разгоняется вдоль земли с углом тангажа на пикирование в 10-15 º (иной раз и больше, и это очень эффектно :-)) и далее переходит в набор высоты. Этот взлет, кстати, – самое распространенное из того, что мы видим в кино.
Если по вертолетному взлететь невозможно, то вертолет может взлететь по самолетному, вырулив для этого к месту старта. Далее все как у самолета :-). Ручка шаг-газ устанавливается на взлетный режим, ручка управления дается немного от себя (для появления горизонтальной тяги), вертолет разбегается и, набрав определенную скорость (порядка 40-50 км/ч), после небольшого взятия ручки управления на себя, отрывается от земли. Далее некоторое выдерживание на высоте около 1,5 метров и подъем.
Взлет по самолетному.
Вот так вкратце о возможностях взлета. О других рабочих (а также аварийных и специальных) режимах полета поговорим в следующих статьях и по пожеланиям трудящихся :-).
А пока всем, я думаю, понятно, что на любых режимах полета управление производится совместными перемещениями ручек управления вертолетом, шаг-газ и педалями. Управление вертолетом максимально приближено к самолетному, но отличия, конечно, на лицо. Пилотов вертолетов даже наблюдению из кабины за землей учат по-другому. Ничего не поделаешь, специфика. Да и сравнивать вертолет и самолет наверное было бы неправильно. Однако, как говорится глаз радует и тот и другой :-). Оба летают удивительно красиво. Что еще нужно ? ? :-)…….
В конце статьи помещаю ролик, который уже есть в моей статье о турбовальном двигателе. Для сегодняшней статьи он подходит как нельзя лучше :-). Взлет с разгоном в зоне воздушной подушки. Правда не совсем типичный, а с применением еще одного элемента под названием шик, граничащий с воздушным хулиганством. Однако ведь до чего ж эффектно выглядит! :-). Летчик… Снимаю шляпу…
В довершении еще ролик « О том как летает вертолет». Последний, к сожалению, на английском языке. Но кое-какие полезные моменты с точки зрения управления в нем можно понять и так и они неплохо показаны. К сожалению более приемлемого материала в этот раз не нашел ? …
До новых встреч…
Фотографии кликабельны.
No related posts.
avia-simply.ru
Устройство и работа несущего винта вертолета
Для того чтобы самолет или планер летал, нужна подъемная сила, а эта сила создается крылом. Поэтому главным в самолете является крыло, ибо в конечном счете Весь самолет может быть сведен в летающее крыло, без фюзеляжа, без оперения.
У вертолета роль крыла играет несущий винт. Даже если в летательном аппарате ничего больше нет, кроме несущего винта, мы можем принципиально назвать его «вертолетом».
Наверное, многие в детстве делали себе такой «вертолет», состоящий только ив одного винта, вырезанного из куска жести. Стартовым устройством для него служила обыкновенная катушка от ниток, вращающаяся на стержне.
Однако роль несущего винта вертолета гораздо более многогранна, чем роль крыла самолета.
Созданием подъемной силы еще не ограничивается назначение несущего винта.
Когда вы посмотрите на вертолет в горизонтальном полете, вы неизбежно обратите внимание на то, что фюзеляж носом наклонен к горизонту. При этом наклоненным вперед оказывается и несущий винт.
Полная аэродинамическая сила R, развиваемая несущим винтом и направленная перпендикулярно к плоскости вращения концов лопастей, в этом случае может быть разложена на две составляющие: направленную вертикально подъемную силу, которая поддерживает вертолет на заданной высоте, и силу, направленную по касательной к траектории полета, Р, которая на вертолете является силой тяги. За счет этой силы вертолет летит вперед. Таким образом, несущий винт в поступательном полете одновременно является и тянущим винтом.

Однако и этим не ограничивается роль несущего винта. У вертолета в отличие от самолета нет рулевых поверхностей, таких, как элероны, триммеры, рули направления и высоты. Да они и не имели бы смысла, так как во время полета не обдувались бы потоком воздуха и в силу этого не могли бы служить целям управления.
Ведь мы знаем, что для изменения положения тела, к нему нужно приложить внешнюю силу. В полете вертолет окружен воздухом, поэтому внешняя сила может быть только результатом взаимодействия каких-либо частей вертолета с воздушной средой. Для того чтобы возникла сила сопротивления воздуха, тело должно перемещаться с большей скоростью. Когда вертолет висит в воздухе, то этому условию не отвечает ни одна его часть, кроме винта. Поэтому роль органа управления вертолетом также возложена на несущий винт. Действуя ручкой управления, летчик с помощью особых устройств, о которых будет рассказано в следующих главах, добивается такого положения, которое равносильно изменению плоскости вращения несущего винта. При этом изменяет свое направление и полная аэродинамическая сила воздушного винта и обе ее составляющие. И если подъемная сила всегда направлена вертикально вверх, то вторая составляющая — по касательной к траектории полета.
В зависимости от угла наклона полной аэродинамической силы меняется не только направление, но и величины ее составляющих. Следовательно, управляя несущим винтом, летчик может изменять не только направление полета, но и скорость полета.
Для подъема или спуска вертолета летчик также воздействует на лопасти несущего винта, уменьшая или увеличивая одновременно и на одинаковую величину угол установки всех лопастей.
Если на вертолете отказывает двигатель, то, уменьшая углы атаки лопастей, летчик ставит несущий винт в положение самовращения (авторотации). Поддерживаемый подъемной силой, создаваемой винтом на этом режиме работы, вертолет совершает безопасный планирующий спуск.
Из сказанного выше ясно, что для понимания устройства и полета вертолета надо разобраться прежде всего в работе несущего винта; для того чтобы вертолет успешно мог летать, конструктор должен обеспечить надежность прежде всего несущего винта.
Летчики, инженеры, техники и механики, летающие на вертолетах и обслуживающие их, прежде всего должны следить за безукоризненным состоянием несущего винта.
Итак, несущий винт — вот что главное в вертолете
Режимов работы несущего винта вертолета чрезвычайно много. Каждому режиму полета вертолета соответствует свой режим работы несущего винта. Основными для вертолета являются: пропеллерный режим, режим косой обдувки, режим самовращения (авгоротация) и режим вихревого -сольца.
Пропеллерный режим возникает при вертикальном подъеме или висении вертолета.
Режим косой обдувки возникает при поступательном полете вертолета.
Режим самовращения возникает при отключении двигателя вертолета от несущего винта в полете, при этом винт вращается под действием потока воздуха.
Режим вихревого кольца возникает при снижении вертолета. При таком режиме поток воздуха, проходя сквозь ометаемую винтом поверхность сверху вниз, вновь подходит к винту сверху.

Однако в некоторых частных случаях, например, в пропеллерном режиме, его работа схожа с работой самолетного винта. Когда самолет находится на земле или летит горизонтально, его винт обдувается со стороны плоскости вращения (по оси). Когда вертолет находится на земле, висит в воздухе или поднимается вертикально вверх, его несущий винт также обдувается со стороны плоскости вращения (по оси). Различие при этом состоит только В ТОМ, что у самолета струи воздуха проходят через плоскость вращения винта в горизонтальном направлении, спереди назад, тогда как у вертолета — в вертикальном направлении, сверху вниз. При этом несущий винт захватывает воздух из зоны А сверху и отбрасывает его, закручивая, вниз, в зону. На место частиц воздуха, забранных из зоны А, поступают частицы воздуха из окружающей среды и частично из зоны Б, но уже вне плоскости вращения винта.
До того, как несущий винт был приведен во вращение, воздух над винтом н под ним находился в состоянии покоя С началом вращения винта приборы, внесенные с область действия винта, но находящуюся вдали от него, покажут наблюдателю, что в сечении 0—0 воздух по-прежнему находится в состоянии относительного покоя. Его давление равно атмосферному, а скорость. Расстояние от сечения 0—0, где еще не наблюдается влияния винта, до плоскости вращения винта есть величина переменная, которая зависит от вязкости среды и точности применяемых нами приборов. Чем точнее прибор, тем он дальше от винта зарегистрирует наличие скорости воздуха, частички которого будут устремлены к винту.
Если бы воздух был лишен сил вязкости, то действие винта сказалось бы бесконечно далеко.
Фактически ввиду того, что воздух представляет собой вязкую среду, влияние винта перестает ощущаться уже на расстоянии десятков метров.
Перенося наши приборы из сечения 0—0 все ближе к сечению, мы заметим постепенный прирост скорости воздуха, подсасываемого винтом. Та скорость, которую воздух имеет, подходя к сечению, называется индуктивной скоростью подсасывания. На основании закона сохранения энергии кинетическая энергия (энергия скорости движения) не может увеличиться без того, чтобы не уменьшался другой какой-либо вид энергии. И действительно, наряду с ростом скорости воздуха до ш, мы замечаем, что давление воздуха р0 при этом падает. Это значит, что увеличение скорости воздуха произошло за счет уменьшения давления. За винтом сечение потока сжимается и происходит еще большее увеличение скорости воздуха. Казалось бы, должно было последовать дальнейшее падение давления. Однако сразу за винтом давление растет до р-2. Не противоречит ли это закону сохранения энергии? Да, противоречит, если мы не примем во внимание того обстоятельства, что воздух извне (от винта) получил добавочную энергию (механическую). Механическая энергия винта, преобразуюсь в кинетическую и потенциальную энергию потока, увеличивает и скорость и давление воздуха одновременно.
В сечении сразу за винтом прибор нам показывает, что воздух по сравнению с сечением имеет скорость и», называемую скоростью отбрасывания. Причем скорость отбрасывания оказывается вдвое больше скорости подсасывания.
Далеко за винтом, в сечении (теоретически на бесконечном удалении), скорость и давление воздуха восстанавливаются до первоначальных значений. Энергия потока при этом из-за наличия сил вязкости рассеивается в пространстве.
Таково действие винта на воздух, которое является следствием приложения к винту энергии вращения. Этому действию соответствует ответное действие воздуха на винт, которое проявляется в виде силы тяги, являющейся проекцией полной аэродинамической силы R на ось, проходящую через втулку винта перпендикулярно плоскости его вращения. Если динамометр, соединенный с винтом, при остановленном винте показывал нулевое значение тяги, то по мере роста оборотов тяга будет все больше и больше возрастать. На режиме висения и вертикального подъема на всех других режимах полета
Величину тяги, создаваемой винтом, можно не только замерить, но и подсчитать.
avia.pro
Как летает вертолет?
Как летает вертолет?

Авиация – сколько в этом слове завораживающего и невероятного! Чего стоят одни только самолёты и вертолёты! А задумывались ли вы, как летает вертолет? Ну, с самолётом всё понятно, крылья позволяют ему держаться в небе, не падая, лететь вперёд, в сторону. «А вот вертолёт таких крыльев не имеет» — скажете вы. И будете правы только наполовину. Но об этом подробней.
Принцип полета вертолета
Вероятно, все видели винт, расположенный на крыше у вертолёта. Именно он и отвечает за поднятие машины в воздух. Несущий винт больших размеров состоит из лопастей, которые при вращении и подымают вертолёт. Они выполняют функцию крыла, как у самолёта, вот только по размеру меньше, а количество их больше. Когда заводится двигатель, лопасти винта начинают вращение, заставляя летательный аппарат взлетать в небо. Сила, которая применяется к каждому крылу-лопасти, суммируется в общую силу, которая применяется ко всей машине в целом. Именно эта аэродинамическая сила перпендикулярная по отношению к плоскости, создающейся при вращении всех лопастей и винта в целом, способствует поднятию в воздух тяжёлого летательного аппарата. Если сила вращения винта больше, чем вес всего летательного аппарата, он будет взлетать. Если сила меньше, полёт не будет совершён. А вот если сила одинаковая, вертолёт застрянет на месте. Можно посмотреть подробней о том, как летает вертолет, на видео. Вы заметите, что после того как лопасти набирают обороты, вертолёт начинает взлетать, но не сразу. Сперва он немного зависает, а уж после того как набирает обороты, взлетает.
elhow.ru
ГЛАВА II. ТЯГА НЕСУЩЕГО ВИНТАПодъемная сила и тяга для поступательного движения у вертолета создаются при помощи несущего винта. Этим он отличается от самолета и планера, у которых подъемная сила при движении в воздухе создается несущей поверхностью — крылом, жестко соединенным с фюзеляжем, а тяга — воздушным винтом или реактивным двигателем (рис. 6). В принципе полета самолета и вертолета можно провести аналогию. В том и другом случае подъемная сила создается за счет взаимодействия двух тел: воздуха и летательного аппарата (самолета или вертолета). По закону равенства действия и противодействия следует, что с какой силой летательный аппарат действует на воздух (вес или земное притяжение), с такой же силой воздух действует на летательный аппарат (подъемная сила).
При полете самолета происходит следующее явление: набегающий встречный поток воздуха обтекает крыло и за крылом скашивается вниз. Но воздух представляет собой неразрывную, достаточно вязкую среду, и в этом скашивании участвует не только слой воздуха, находящийся в непосредственной близости от поверхности крыла, но и соседние слои его. Таким образом, при обтекании крыла за каждую секунду скашивается вниз назад довольно значительный объем воздуха, приблизительно равный объему цилиндра, у которого сечением является круг диаметром, равным размаху крыла, а длина — скорость полета в секунду. Это есть не что иное, как секундный расход воздуха, участвующего в создании подъемной силы крыла (рис. 7). Рис. 7. Объем воздуха, участвующего в создании подъемной силы самолета
Из теоретической механики известно, что изменение количества движения за единицу времени равно действующей силе:
где Р — действующая сила; в результате взаимодействия с крылом самолета. Следовательно, подъемная сила крыла будет равна секундному приросту количества движения по вертикали в уходящей струе. где l—полуразмах крыла;Вращающийся несущий винт сметает поверхность, которую можно представить себе как несущую, аналогичную крылу самолета (рис. 8). Воздух, протекающий через поверхность, сметаемую несущим винтом, в результате взаимодействия с вращающимися лопастями отбрасывается вниз с индуктивной скоростью и. В случае горизонтального или наклонного полета воздух притекает к поверхности, сметаемой несущим винтом под некоторым углом (косая обдувка). Как и у самолета, объем воздуха, участвующего в создании полной аэродинамической силы несущего винта, можно представить в виде цилиндра, у которого площадь основания равна площади поверхности, сметаемой несущим винтом, а длина — скорости полета, выраженной в м/сек. При работе несущего винта на месте или в вертикальном полете (прямая обдувка) направление воздушного потока совпадает с осью несущего винта. В этом случае воздушный цилиндр будет расположен вертикально (рис. 8, б). Полная аэродинамическая сила несущего винта выразится как произведение массы воздуха, протекающего через поверхность, сметаемую несущим винтом за одну секунду, на индуктивную скорость уходящей струи: где πD2/4 — площадь поверхности, ометаемой несущим винтом;u — индуктивная скорость уходящей струи в м/сек. Необходимо оговориться, что в рассмотренных случаях как для крыла самолета, так и для несущего винта вертолета за индуктивную скорость и принимается индуктивная скорость уходящей струи на каком-то удалении от несущей поверхности. Индуктивная скорость струи воздуха, возникающая на самой несущей поверхности имеет в два раза меньшую величину.Такое толкование происхождения подъемной силы крыла или полной аэродинамической силы несущего винта не является совершенно точным и справедливо только в идеальном случае. Оно лишь принципиально правильно и наглядно объясняет физический смысл явления. Здесь же уместно отметить одно очень важное обстоятельство, вытекающее из разобранного примера. Если полная аэродинамическая сила несущего винта выражается как произведение массы воздуха, протекающего через поверхность, ометаемую несущим винтом, на индуктивную скорость, а объем этой массы есть цилиндр, у которого основанием является площадь поверхности, ометаемой несущим винтом, и длиной — скорость полета, то совершенно ясно, что для создания тяги постоянной величины (например, равной весу вертолета) при большей скорости полета, а значит, и при большем объеме отбрасываемого воздуха, требуется меньшая индуктивная скорость и, следовательно, меньшая мощность двигателя. Наоборот, для поддержания вертолета в воздухе при “висении” на месте требуется больше мощности, чем во время полета с некоторой поступательной скоростью, при которой имеет место встречный поток воздуха за счет движения вертолета. Иными словами, при затрате одной и той же мощности (например, номинальной мощности двигателя) в случае наклонного полета с достаточно большой скоростью можно достичь большего потолка, чем при вертикальном подъеме, когда общая скорость перемещения вертолета меньше, чем в первом случае. Поэтому у вертолета имеется два потолка: статический, когда высота набирается в вертикальном полете, и динамический, когда высота набирается в наклонном полете, причем динамический потолок всегда выше статического.В работе несущего винта вертолета и воздушного винта самолета есть много общего, но имеются и принципиальные отличия, о которых будет сказано дальше. Сравнивая их работу, можно заметить, что полная аэродинамическая сила, а следовательно, и тяга несущего винта вертолета, являющаяся составляющей силы R в направлении оси втулки, всегда больше (в 5—8 раз) при одинаковой мощности двигателя и одинаковом весе летательных аппаратов за счет того, что диаметр несущего винта вертолета в несколько раз больше диаметра воздушного винта самолета. При этом скорость отбрасывания воздуха у несущего винта меньше, нежели скорость отбрасывания у воздушного винта.Величина тяги несущего винта в очень большой степени зависит от его диаметра D и числа оборотов. При увеличении диаметра винта в два раза тяга его увеличится приблизительно в 16 раз, при увеличении числа оборотов вдвое тяга увеличится приблизительно в 4 раза. Кроме того, тяга несущего винта зависит также от плотности воздуха ρ, угла установки лопастей φ (шага несущего винта), геометрических и аэродинамических характеристик данного винта, а также от режима полета. Влияние последних четырех факторов выражается обычно в формулах тяги воздушного винта через коэффициент тяги ат. .Таким образом, тяга несущего винта вертолета будет пропорциональна: Необходимо отметить, что на величину тяги при полетах у земли оказывает влияние так называемая “воздушная подушка”, благодаря чему вертолет может оторваться от земли и подняться на несколько метров при затрате мощности меньшей, чем та, которая необходима для “висения” на высоте 10—15 м. Наличие “воздушной подушки” объясняется тем, что воздух, отбрасываемый винтом, ударяется о землю и несколько поджимается, т. е. увеличивает свою плотность. Влияние “воздушной подушки” особенно сильно сказывается при работе винта у земли. За счет поджатия воздуха тяга несущего винта в этом случае, при одной и той же затрате мощности, увеличивается на 30— 40%. Однако с удалением от земли это влияние быстро уменьшается, а при высоте полета, равной половине диаметра винта, “воздушная подушка” увеличивает тягу только на 15—20%. Высота “воздушной подушки” приблизительно равна диаметру несущего винта. Далее прирост тяги исчезает.Для грубого расчета величины тяги несущего винта на режиме висения пользуются следующей формулой: T=(aND)2/3 а — коэффициент, характеризующий аэродинамическое качество несущего винта и влияние “воздушной подушки”. В зависимости от характеристик несущего винта величина коэффициента а при висении у земли может иметь значения 15 — 25.Несущий винт вертолета обладает исключительно важным свойством — способностью создавать подъемную силу на режиме самовращения (авторотации) в случае остановки двигателя, что позволяет вертолету совершать безопасный планирующий или парашютирующий спуск и посадку. Вращающийся несущий винт сохраняет необходимое число оборотов при планировании или парашютировании, если его лопасти будут переведены на небольшой угол установки (l—50)1. При этом сохраняется подъемная сила, обеспечивающая спуск с постоянной вертикальной скоростью (6—10 м/сек), с последующим уменьшением ее при выравнивании перед посадкой до l—1,5 м/сек.В работе несущего винта в случае моторного полета, когда мощность от двигателя передается на винт, и в случае полета на режиме самовращения, когда энергию для вращения винта он получает от встречной струи воздуха, имеется существенное отличие. вертолета: В моторном полете встречный воздух набегает на несущий винт сверху или сверху под углом. При работе винта на режиме самовращения воздух набегает на плоскость вращения снизу или под углом снизу (рис. 9). Скос потока за несущим винтом в том и другом случае будет направлен вниз, так как индуктивная скорость согласно теореме о количестве движения будет направлена прямо противоположно тяге, т. е. приближенно вниз по оси несущего винта. 1 Здесь речь идет об эффективном угле установки в отличие от конструктивного.
|
twistairclub.narod.ru