Инерциальная навигационная система: как это работает
Долгое время отсутствие точной информации о местоположении самолета или вертолета было серьезным препятствием на пути развития авиации. Пилотам была необходима навигационная система, которая не зависела бы от земных ориентиров и капризов природы. Появление автономных инерциальных систем навигации стало большим шагом в истории авиации. Первые инерциальные системы в нашей стране были разработаны в 1960-х годах в Раменском приборостроительном КБ, входящем сегодня в концерн «Радиоэлектронные технологии» (КРЭТ) Госкорпорации Ростех.
В автономном полете
Первые пилоты в движении ориентировались по солнцу, звездам или компасу, затем появились радиосигналы, но все эти способы зависели от внешних факторов, а значит, не были полностью надежными. Требовался навигационный прибор, анализирующий движение самолета и не использующий внешние источники информации.
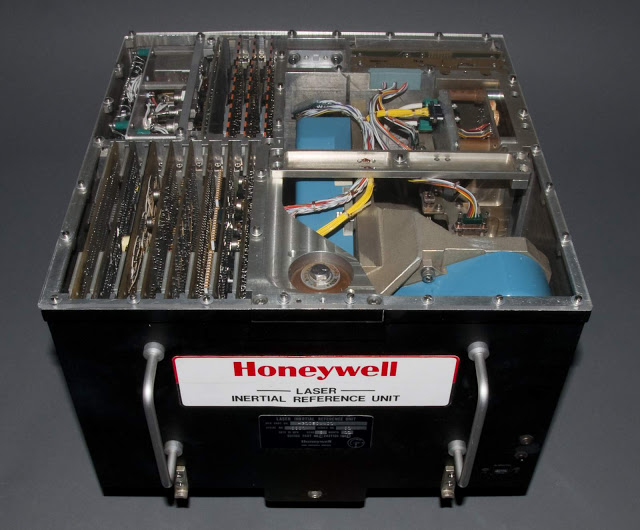
Бесплатформенная навигационная система БИНС-СП-1
Такой метод теоретически был разработан в 1930-е годы, но реализовать его удалось только спустя 20 лет. Инерциальная навигация основывается на применении законов механики, в частности на теории устойчивости механических систем, которую разрабатывали русские математики А.М. Ляпунов и А.В. Михайлов. Первые инерциальные навигационные системы (ИНС) были созданы в 1950-е годы в США и СССР. Они были довольно громоздкими и могли занимать все свободное пространство самолета. Современные ИНС изготавливаются с применением микроэлектронных технологий и занимают гораздо меньше места.
ИНС могут решать различные задачи. Это и общая географическая ориентировка, и определение местонахождения относительно заданной траектории или цели, и наведение на движущуюся цель.
Устройство инерциальной системы
Основа работы ИНС заключается в измерении ускорений летательного аппарата и его угловых скоростей относительно трех осей самолета для того, чтобы исходя из этих данных определить местоположение самолета, его скорость, курс и другие параметры. По результатам анализа объект стабилизируется, и может использоваться автоматическое управление.
Лазерный гироскоп
Для сбора информации о полете в состав ИНС включаются акселерометры, считывающие линейное ускорение, и гироскопы, позволяющие определить углы наклона самолета относительно основных осей: тангаж, рысканье и крен. Точность полученной информации зависит от характеристик этих приборов. Анализом данных занимается компьютер, который затем по определенным навигационным алгоритмам корректирует движение объекта.
ИНС делятся на платформенные и бесплатформенные. Основой для платформенных ИНС служит гиростабилизированная платформа. В бесплатформенных системах акселерометры и гироскопы жестко связаны с корпусом прибора. Функции платформы моделируются математически вычислительной системой. Бесплатформенные системы выгодно отличаются меньшим весом и габаритами, а также возможностью работать при значительных перегрузках.
В бесплатформенных системах акселерометры и гироскопы жестко связаны с корпусом прибора. Функции платформы моделируются математически вычислительной системой. Бесплатформенные системы выгодно отличаются меньшим весом и габаритами, а также возможностью работать при значительных перегрузках.
Преимущества ИНС перед другими навигационными системами заключаются в их полной независимости от внешних источников данных, повышенной защите от помех, высокой информативности и возможности передавать информацию на большой скорости. Отсутствием какого-либо излучения при работе ИНС обеспечивается скрытность объекта, на котором она используется.
Недостатком ИНС можно назвать ошибки, которые накапливаются с течением времени в получаемой от приборов информации. Это могут быть как методические ошибки, так и ошибки, связанные с неверной начальной настройкой оборудования. Для их коррекции создаются интегрированные навигационные системы, где данные, получаемые ИНС, дополняются данными, поступающими от неавтономных систем, например спутниковой навигации.
Авионика из Раменского
Инерциальные навигационные системы сегодня применяются не только в авиации. Их появление повлияло на развитие космонавтики, увеличилась дальность походов подводных лодок. ИНС используются в управлении морскими судами и баллистическими ракетами, применяются в геодезии. Также актуально применение подобных систем в беспилотных летательных аппаратах.

К началу 1970-х годов предприятием были решены проблемы точного управляемого полета на большие расстояния. В дальнейшие годы инерциальные системы многократно совершенствовались. Раменское предприятие создавало навигационные комплексы и другое оборудование для самолетов ОКБ Сухого, Микояна, Туполева, Ильюшина, Камова, Миля и др. В 2012 году предприятие вошло в состав концерна «Радиоэлектронные технологии». Сегодня РПКБ – один из мировых лидеров в производстве авиационной электроники.
как устроена инерциальная навигационная система
Когда-то путешественникам хватало простейших приборов для определения местоположения, но со временем расстояния и скорости перемещения выросли, и к навигационному оборудованию стали предъявляться повышенные требования. Радиолокацию сменила спутниковая навигация, но и у нее остаются свои слабые стороны – зависимость от спутников, уязвимость для помех и подавления. Поэтому разработанные во второй половине XX века автономные инерциальные системы навигации до сих пор сохраняют актуальность и продолжают развиваться.
Поэтому разработанные во второй половине XX века автономные инерциальные системы навигации до сих пор сохраняют актуальность и продолжают развиваться.
Крупнейшим производителем инерциального навигационного оборудования в нашей стране является «Концерн Радиоэлектронные технологии» Госкорпорации Ростех. Его предприятия разрабатывают и выпускают инерциальные навигационные системы более 60 лет. Недавно Раменский приборостроительный завод выпустил тысячный блок уникальной инерциальной навигационной системы ИНС-2000.
Рассказываем, как устроена и работает инерциальная навигационная система, что ей помогает не зависеть от земных ориентиров и капризов природы.
Без внешних ориентиров
Инерциальные навигационные системы (ИНС) – единственное на сегодняшний день средство для автономного, то есть не зависящего от внешних источников информации, определения положения и ориентации объекта в пространстве. Подобные системы используются в авиации, космонавтике, на кораблях и подводных лодках, в беспилотных и роботизированных устройствах. С помощью ИНС движущиеся объекты могут без спутниковой связи с высокой точностью определять местоположение, свою ориентацию и скорость. Кроме того, в отличие от распространенной навигации по GPS инерциальные системы более устойчивы к помехам и перехвату.
Подобные системы используются в авиации, космонавтике, на кораблях и подводных лодках, в беспилотных и роботизированных устройствах. С помощью ИНС движущиеся объекты могут без спутниковой связи с высокой точностью определять местоположение, свою ориентацию и скорость. Кроме того, в отличие от распространенной навигации по GPS инерциальные системы более устойчивы к помехам и перехвату.
Устройство ИНС можно разделить на два ключевых элемента: измерительное оборудование, собирающее данные, и навигационный компьютер, обрабатывающий информацию. За измерения в составе ИНС отвечают гироскопы и акселерометры. Гироскопы – они могут быть механическими или лазерными – определяют углы наклона объекта относительно трех основных осей: тангаж, рысканье и крен. Акселерометры считывают линейное ускорение. ИНС может быть дополнена и другими датчиками, например магнитометром, измеряющим магнитное поле, или барометрическим высотомером.
ИНС бывают платформенными и бесплатформенными.
Как работает инерциальная система
В упрощенном виде работу ИНС можно представить по следующей схеме. В блок ввода начальной информации загружаются исходные данные для калибровки навигационной системы и ориентации инерционных датчиков. Затем эти данные попадают в блок измерений, вычислительный блок и блок времени, который синхронизируется с мировым временем. В ходе движения блок измерений регистрирует изменения параметров, на основе которых вычислительный блок определяет скорость и координаты объекта, после чего они передаются в систему управления.
Важнейшим параметром в работе ИНС является система отсчета. Она обеспечивает исходную ориентацию для начала навигации. Грубо говоря, система отсчета каждый раз подсказывает прибору, где право, где лево, где верх, а где низ, а также точку старта движения. В качестве системы отсчета могут выступать астрономические объекты, Земля или горизонт, также она может быть произвольной.
Несмотря на довольно высокую точность, инерциальные навигационные системы имеют и свои недостатки. Слабым местом ИНС являются ошибки в измерениях, которые накапливаются с течением времени в получаемой от приборов информации – так называемый дрейф. Так как навигационный компьютер суммирует каждое измерение, чтобы выяснить, как изменилось положение по сравнению с предыдущей оценкой, небольшая погрешность со временем растет, и общая оценка становится все более неточной. Для коррекции подобных ошибок инерциальные системы обычно дополняются GPS-датчиками.
Навигация из Раменского
В нашей стране первые устройства, основанные на инерциальной навигации, появились в 1960-е годы. Пионером в этом направлении выступило Раменское приборостроительное конструкторское бюро (РПКБ), в котором уже с 1958 года разрабатывались первые проекты ИНС для летательных аппаратов. В последующие годы инерциальные системы многократно совершенствовались. Раменское предприятие создавало навигационные комплексы и другое оборудование для самолетов ОКБ Сухого, Микояна, Туполева, Ильюшина, Камова, Миля и др.
Раменский приборостроительный завод (РПЗ), при котором когда-то было создано конструкторское бюро, также многие годы выпускает инерциальные навигационные системы. Оба предприятия входят в структуру «Концерна Радиоэлектронные технологии» Госкорпорации Ростех. Одной из основных серийных инерциальных навигационных систем, выпускаемых РПЗ, сегодня является система ИНС-2000 и ее модификации.
ИНС-2000 относится к платформенным системам с применением механических гироскопов. Она выполнена в виде моноблока, состоящего из гиростабилизированной платформы на базе динамически настраиваемых гироскопов, сервисной электроники, вычислителя и блока интерфейса. При необходимости система может комплектоваться магнитометром и интегрироваться со спутниковой навигацией.
Она выполнена в виде моноблока, состоящего из гиростабилизированной платформы на базе динамически настраиваемых гироскопов, сервисной электроники, вычислителя и блока интерфейса. При необходимости система может комплектоваться магнитометром и интегрироваться со спутниковой навигацией.
ИНС-2000 отличается высокой точностью работы. При автономном использовании погрешность системы составляет не более 3,7 км за час полета, а при работе со встроенным блоком спутниковой коррекции не превышает 40 м за час.
Раменским приборостроительным заводом создано пять модификаций системы, которые позволяют использовать разработку практически для любых летательных аппаратов. Изделия отличаются функционально-программным обеспечением — каждое из них адаптировано под конкретные комплексы бортового оборудования, учитывает характеристики определенного типа самолетов и вертолетов.
Сегодня ИНС-2000 используется в качестве бортового датчика навигационной информации в большинстве отечественных вертолетов и самолетов. В 2016 году на раменском предприятии была проведена модернизация изделия по замене импортной элементной базы на отечественную в рамках импортозамещения. В феврале 2022 года Раменский приборостроительный завод выпустил тысячный блок инерциальной навигационной системы ИНС-2000.
В 2016 году на раменском предприятии была проведена модернизация изделия по замене импортной элементной базы на отечественную в рамках импортозамещения. В феврале 2022 года Раменский приборостроительный завод выпустил тысячный блок инерциальной навигационной системы ИНС-2000.
Что такое инерциальная навигационная система? · VectorNav
Статьи по инерциальной навигации
Инерциальная навигационная система (ИНС) представляет собой автономное устройство, состоящее из инерциально-измерительного блока (ИИБ) и вычислительного блока. IMU обычно состоит из 3-осевого акселерометра, 3-осевого гироскопа и иногда 3-осевого магнитометра и измеряет угловую скорость и ускорение системы. Вычислительный блок, используемый для определения пространственного положения, положения и скорости системы на основе необработанных измерений IMU с учетом начального исходного положения и пространственного положения.
Как упоминалось выше, в инерциальной навигационной системе (ИНС) используется инерциальный измерительный блок (ИМИ), состоящий из акселерометров, гироскопов, а иногда и магнитометров. Гироскоп и магнитометр обеспечивают систему ИНС теми же вкладами, что и
они предоставляют AHRS. Измерения угловой скорости гироскопа интегрированы для решения по ориентации с высокой частотой обновления, в то время как магнитометр (если используется) обеспечивает ориентир, аналогичный магнитному компасу. Дополнительная информация о вкладе
об этих датчиках можно найти в разделе 1.6 Учебника по инерциальной навигации.
Гироскоп и магнитометр обеспечивают систему ИНС теми же вкладами, что и
они предоставляют AHRS. Измерения угловой скорости гироскопа интегрированы для решения по ориентации с высокой частотой обновления, в то время как магнитометр (если используется) обеспечивает ориентир, аналогичный магнитному компасу. Дополнительная информация о вкладе
об этих датчиках можно найти в разделе 1.6 Учебника по инерциальной навигации.
Вычислительный блок отвечает за запись всех инерциальных измерений и выполнение необходимых расчетов, как правило, с использованием расширенной фильтрации Калмана для определения ориентации, скорости и, наконец, положения. Следующее
разделы будут посвящены расчетам, необходимым для определения ориентации, скорости и положения на основе измерений IMU, а также обсуждены различные характеристики датчиков и то, как они влияют на общую точность INS.
Если вы хотите узнать больше о фильтрации Калмана, обратитесь к разделу 2. 8 нашего учебника по инерциальной навигации.
8 нашего учебника по инерциальной навигации.
ПОЛОЖЕНИЕ
Положение системы рассчитывается путем интегрирования угловой скорости (угловой скорости), измеренной гироскопами за определенный период времени. Для целей этого анализа мы рассматриваем одноосное движение, так как нелинейная связь положения делает многоосевой анализ в общем случае невозможен. Уравнение для измеренной угловой скорости для одной оси может быть представлено с источниками ошибок следующим образом:
\begin{equation} \tilde{w} = (1+k)w_t + b_g +\eta_g \end{equation}
где $\tilde{w}$ — измеренная угловая скорость, $w_t$ — истинная угловая скорость, $k$ — ошибка масштабного коэффициента, $b_g$ — изменяющееся во времени смещение, $\eta_g$ — случайный гауссовский шум (определяемый спецификацией углового случайного блуждания (ARW)).
СКОРОСТЬ И ПОЛОЖЕНИЕ Самостоятельная инерциальная навигация, также известная как счисление пути, требует чрезвычайно точных инерциальных датчиков для обеспечения достаточно точной оценки положения и скорости для навигационных целей.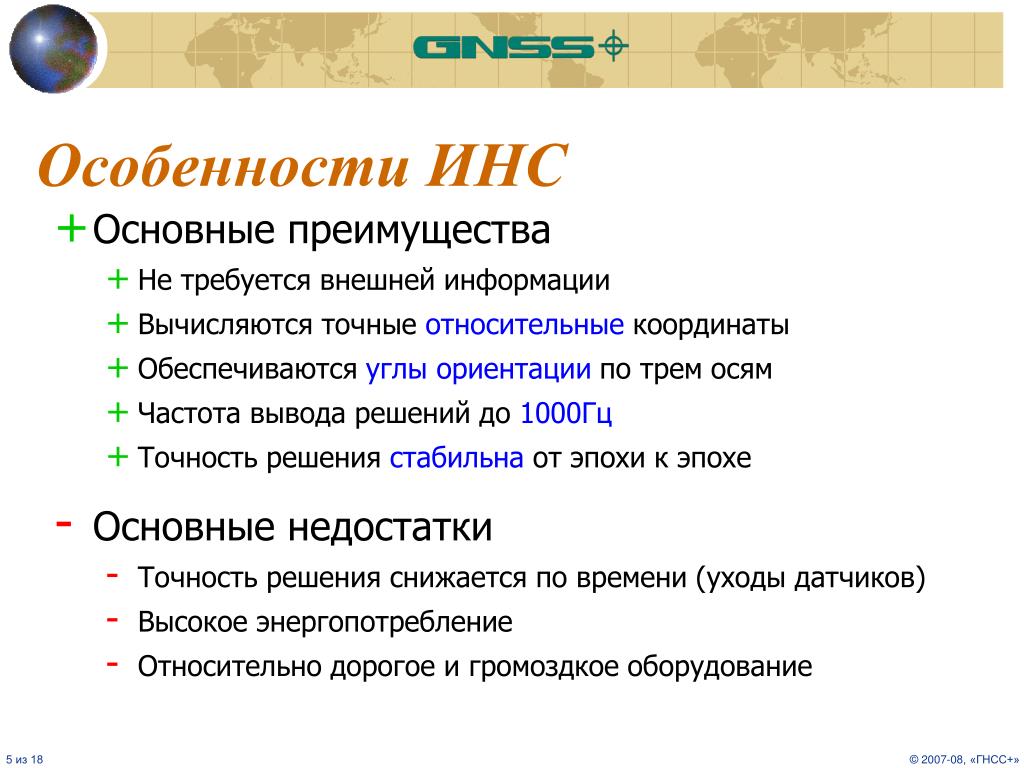 Различные источники ошибок в измерениях инерциальных датчиков
сами по себе приводят к неограниченному росту ошибок в навигационном решении ИНС, таких как смещение, шум, ошибки масштабного коэффициента, рассогласования, температурные зависимости и гироскопическая чувствительность. Производительность гироскопа обычно доминирует над ошибками позиционирования.
при выполнении чистой интеграции инерциальных датчиков.
Различные источники ошибок в измерениях инерциальных датчиков
сами по себе приводят к неограниченному росту ошибок в навигационном решении ИНС, таких как смещение, шум, ошибки масштабного коэффициента, рассогласования, температурные зависимости и гироскопическая чувствительность. Производительность гироскопа обычно доминирует над ошибками позиционирования.
при выполнении чистой интеграции инерциальных датчиков.
Акселерометры в системе INS измеряют как линейное ускорение системы из-за движения, так и псевдоускорение, вызванное гравитацией. Чтобы получить линейное ускорение системы из-за движения, псевдоускорение, вызванное силой тяжести, должно
быть вычтено из измерения акселерометра с использованием оценок положения системы. Результирующее измерение линейного ускорения можно затем интегрировать один раз, чтобы получить скорость системы, и дважды, чтобы получить положение системы. Однако,
эти расчеты в значительной степени зависят от того, поддерживает ли ИНС точную оценку ориентации, поскольку любая ошибка в ориентации вызывает ошибку в расчетном ускорении, что, следовательно, вызывает ошибки в интегрированном положении и скорости.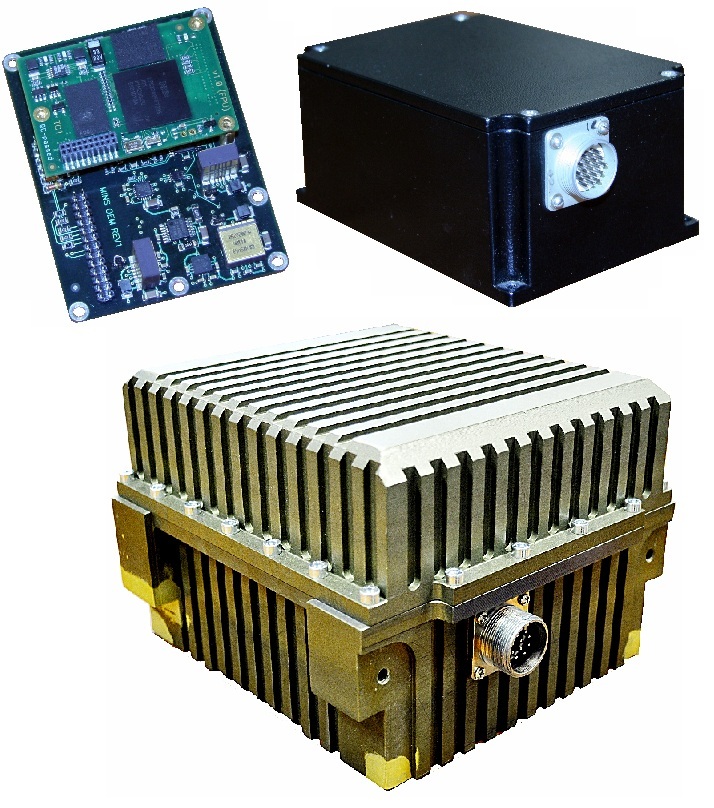 9{\ гидроразрыва {3} {2}} \ справа] \ конец {уравнение}
9{\ гидроразрыва {3} {2}} \ справа] \ конец {уравнение}
Где:
- VRW: случайное блуждание по скорости
- ARW: случайное блуждание по углу
- $b_a$: смещение ускорения
- $b_g$ : смещение гироскопа
Подробнее см. в Разделе 3.3, Бюджет ошибок INS, чтобы узнать, как рабочие характеристики акселерометров и
гироскопы относятся к точности определения местоположения и скорости.
ЗАКЛЮЧЕНИЕ
Мы выделили вклад различных существенных источников ошибок в оценку роста ошибки положения для решения без посторонней инерциальной навигации. В таблице ниже представлены типичные параметры для различных классов инерционных наличие датчиков.
| КЛАСС | АКСЕЛЕРОМЕТР ОТКЛОНЕНИЯ (мг) | СКОРОСТЬ СЛУЧАЙНОГО БАЛАНДА (м/с/$\sqrt{\mbox{hr}}$) | ГИРАНДИЧЕСКИЙ ОТКЛОН (град/час) | УГОЛ ХОДА $\sqrt{\mbox{hr}}$) |
|---|---|---|---|---|
| Consumer | 10 | 1 | 100 | 2 |
| Industrial | 1 | 0.1 | 10 | 0.2 |
| Tactical | 0.1 | 0.03 | 1 | 0.05 |
| Navigation | 0.01 | 0. 01 01 | 0.01 | 0.01 |
Using the data from the table above we can then estimate ошибка положения увеличивается или дрейфует со временем для различных типов инерциальных датчиков. Как видно ниже, устройства потребительского класса, что-то вроде того, что есть в вашем смартфоне, ошибка позиционирования вырастет до 400 м в течение 1 минуты, в то время как устройство тактического класса накопит только 5 м ошибки позиционирования.
| GRADE/TIME | 1 s | 10 s | 60 s | 10 min | 1 hr | |
|---|---|---|---|---|---|---|
| Consumer | 6 cm | 6.5 m | 400 m | 200 km | 39 000 км | |
| Промышленный | 6 мм | 0,7 м | 40 м | 20 км | 3 901 км | 076 |
| Tactical | 1 mm | 8 cm | 5 m | 2 km | 400 km | |
| Navigation | <1 mm | 1 mm | 50 cm | 100 m | 10 km |
4 Интересные факты об инерциальных навигационных системах
Точность, скорость и баланс являются ключевыми факторами для любого движущегося объекта. Когда речь идет о сложных транспортных средствах, таких как самолеты, автономные транспортные средства, корабли, космические корабли, подводные лодки и даже беспилотные летательные аппараты (БПЛА), потребность в точной системе, которая помогает поддерживать и контролировать идеальное движение, имеет важное значение. С помощью инерциальных навигационных систем движущиеся транспортные средства могут безопасно и точно выполнять свои задачи без использования GPS.
Когда речь идет о сложных транспортных средствах, таких как самолеты, автономные транспортные средства, корабли, космические корабли, подводные лодки и даже беспилотные летательные аппараты (БПЛА), потребность в точной системе, которая помогает поддерживать и контролировать идеальное движение, имеет важное значение. С помощью инерциальных навигационных систем движущиеся транспортные средства могут безопасно и точно выполнять свои задачи без использования GPS.
Как работает инерциальная навигационная система?
Инерциальная навигационная система (INS) рассчитывает местоположение, ориентацию и скорость движущегося объекта без использования технологии GPS.
В устройстве INS обычно используются акселерометры и гироскопы, то есть датчики движения и вращения, которые взаимодействуют с компьютерным блоком, который затем преобразует данные в действенные элементы управления. Это ваша основная инерциальная навигационная система, к которой можно добавить другие функции.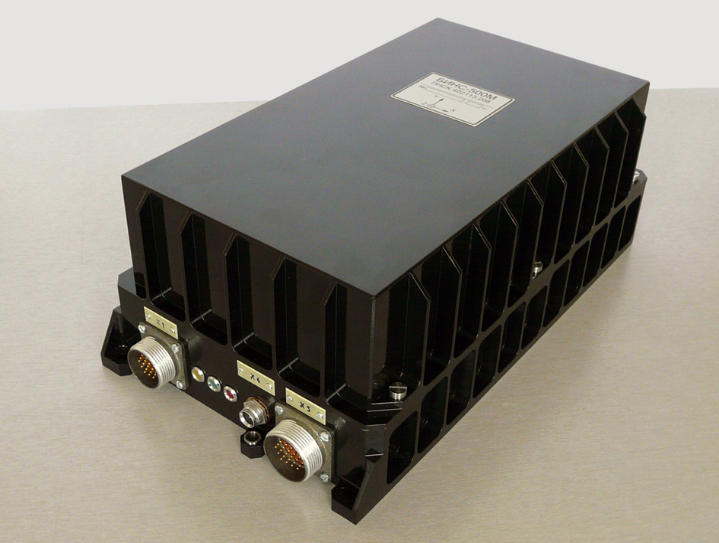 Например, инерциальные навигационные системы могут быть дополнены магнитными датчиками и барометрическими высотомерами.
Например, инерциальные навигационные системы могут быть дополнены магнитными датчиками и барометрическими высотомерами.
Устройства INS работают по системе счисления пути, что означает, что начальное положение, скорость и ориентация транспортного средства предоставляются внешним источником, которым может быть спутниковый приемник GPS или оператор. Имея эти данные, ИНС может начать вычислять положение, скорость и другие элементы движения. По мере того, как транспортное средство продолжает двигаться, устройство INS будет самостоятельно рассчитывать и обновлять все элементы движения с помощью информации, полученной от датчиков движения.
Компоненты инерциальной навигационной системы
Как упоминалось ранее, инерциальные навигационные системы в основном состоят из акселерометров и гироскопов, а также компьютера, который обрабатывает информацию, поступающую от датчиков движения.
Гироскопы предназначены для измерения угловой скорости рамки датчика относительно инерциальной системы отсчета. Инерциальная система отсчета обеспечивает исходную ориентацию системы, к которой добавляется угловая скорость, так что направление инерциальной навигационной системы всегда доступно.
Инерциальная система отсчета обеспечивает исходную ориентацию системы, к которой добавляется угловая скорость, так что направление инерциальной навигационной системы всегда доступно.
В то время как гироскопы обеспечивают ориентацию, акселерометры предоставляют информацию о скорости и направлении ускорения на основе измерения линейного ускорения транспортного средства относительно самого себя. Угловая скорость вместе с линейным ускорением могут предоставить точную информацию обо всех изменениях положения движущегося транспортного средства.
Эти датчики движения являются частью ядра каждой инерциальной навигационной системы, которая представляет собой инерциальный измерительный блок (IMU). Это устройство, которое сообщает о движениях и характеристиках движущегося транспортного средства и обычно состоит из трех гироскопов и трех акселерометров. Некоторые IMU также оснащены магнитометрами. Инерциальная навигационная система должна содержать как минимум три акселерометра и три гироскопа, чтобы обеспечить соответствующую работу.
INS использует измерения, предоставленные IMU, для расчета данных, необходимых для навигации и управления транспортным средством, таких как высота, скорость, ориентация и многое другое.
Компьютер синтезирует всю информацию путем интеграции данных, собранных с датчиков движения, для расчета текущего местоположения автомобиля.
Инерциальные навигационные системы и технология GPS
Технология GPS относится к навигационной системе, работающей на основе спутниковой передачи, сегменту наземного управления и специальному оборудованию. Система предоставляет данные о географическом положении, времени, скорости и другую информацию для наземных, воздушных и морских путешествий. Чтобы передавать точные измерения, устройство GPS должно оставаться подключенным как минимум к четырем спутникам спутниковой системы, которая вращается вокруг Земли.
Технология GPS в основном используется для данных о местоположении, составлении карт, отслеживании движущихся объектов, навигации и оценке времени и измерениях.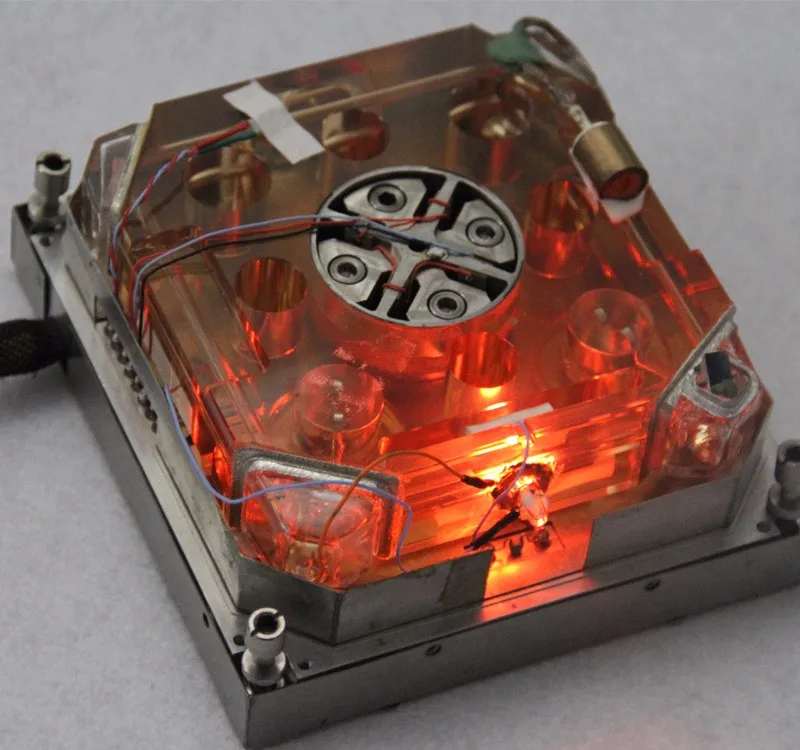 Однако эта информация зависит от спутникового соединения, и если устройство GPS не может подключиться как минимум к четырем спутникам, предоставленных данных будет недостаточно для полноценной работы устройства.
Однако эта информация зависит от спутникового соединения, и если устройство GPS не может подключиться как минимум к четырем спутникам, предоставленных данных будет недостаточно для полноценной работы устройства.
Устройство GPS — это полезное дополнение к вашему смартфону, позволяющее легко добраться до любого пункта назначения, оценить пробки и сообщить другим о вашем местонахождении. Однако, когда речь идет о сложных или критически важных операциях, таких как авиаперевозки или наземные военные операции, в дополнение к технологии GPS требуется автономное решение.
Инерциальные навигационные системы автономны после инициализации, не полагаются на связь со спутниками и могут передавать более детализированные данные, чем отдельное устройство GPS. Более того, они устойчивы к радиолокационным помехам и обману, так как являются автономными.
Инерциальные навигационные системы: преимущества и проблемы
Инерциальные навигационные системы являются идеальным решением для сложных операций на суше, на море, в воздухе и в космосе и могут использоваться в самых разных приложениях, в том числе для определения местоположения и отслеживания с помощью смартфонов, которые называются мобильными инерциальными навигационными системами. Однако в основном они используются для навигации самолетов и кораблей, а также для решения тактических и космических задач.
Однако в основном они используются для навигации самолетов и кораблей, а также для решения тактических и космических задач.
Благодаря достижениям в области микроэлектромеханических систем (МЭМС) появилась возможность разрабатывать легкие инерциальные навигационные системы меньшего размера, такие как HGuide n380.
Инерциальная навигационная система HGuide n380 поставляется в легком корпусе, оснащена мощным инерциальным измерительным блоком i300 и предоставляет данные с впечатляющей степенью детализации, такие как положение с отметкой времени, скорость, угловая скорость, линейное ускорение, крен, тангаж и информация о заголовке.
Тем не менее, инерциальные измерительные устройства все еще сталкиваются с определенными проблемами, которые в основном связаны с дрейфами интегрирования – незначительными ошибками, возникающими при измерении угловой скорости и линейного ускорения. Эти ошибки могут увеличиваться и становиться более заметными по мере того, как каждое новое положение транспортного средства рассчитывается на основе предыдущего.