Кривые Жуковского. Понятие о 1-ом и 2-ом режимах полета
⇐ Предыдущая111213141516171819Следующая ⇒
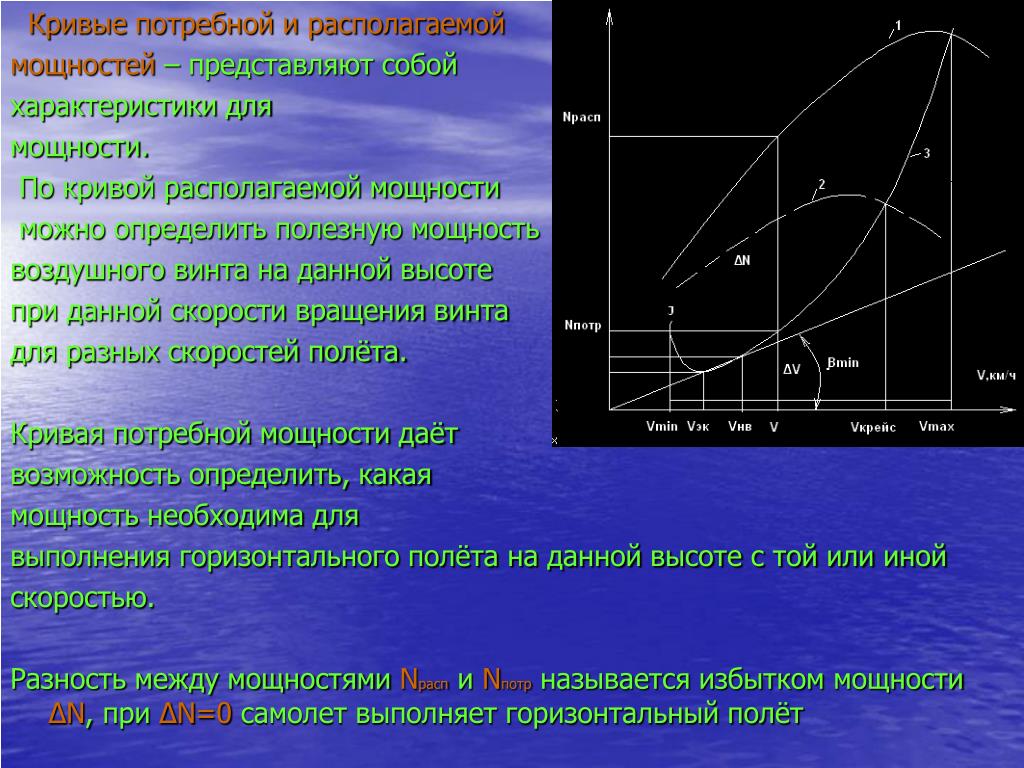
Кривыми Жуковского называется график, на котором изображены в одной системе координат две кривые. На вертикальной оси откладывается тяга, на горизонтальной — скорость полёта. Эти кривые обычно рассматривают применительно к горизонтальному полету. Нижняя кривая отражает потребную тягу для горизонтального полета относительно скорости полёта. Кривые Жуковского строятся для каждой высоты полета. С помощью кривых можно решить ряд важных задач по определению летных характеристик самолета (рис.4).
Рис.4 Кривые Жуковского
Как видно на графике (рис.4), наивыгоднейшая скорость Vнв соответствует минимальной тяге. Верхняя кривая отражает максимальную тягу силовой установки в зависимости от скорости полета. Точка пересечения двух кривых является точкой максимальной скорости горизонтального полёта.
При снижении тяги двигателя верхняя кривая опускается вниз, и мы увидим уже 2 точки пересечения кривых (рис.
Рис.5 Иллюстрация 1 и 2 режимов полета.
При некотором снижении скорости полета от V1 на DV1 возникает остаток тяги DP1, который стремится вернуть самолёт в исходный режим, т.е. разогнать до скорости V1. При таком же снижении скорости на DV2 от скорости V2 наблюдается недостаток тяги DP2 — и самолёт ещё больше теряет скорость, т.е. тормозится, и для восстановления исходного режима полёта требуется немедленное увеличение тяги для того, чтобы превысить DP2 — фактически, как говорят пилоты, самолёт висит на тяге. Полёт на V менее Vнв требует повышенного внимания к скорости и постоянного импульсного управления тягой.
Полёт на V более Vнв называется полётом на 1-ом режиме, а полёт на V менее Vнв — полётом на 2-ом режиме. Границей 1-го и 2-го режима полёта является Vнв.
Границей 1-го и 2-го режима полёта является Vнв.
Полёт на 2-ом режиме сопряжён с повышенной опасностью, так как происходит вблизи V срыва и может выполняться только на самолёте с большим запасом тяги и с высокой приёмистостью двигателя. Техника выполнения полета требует специальной тренировки. На лёгких и самодельных ЛА не рекомендуется выполнять полёт на 2-ом режиме. Второй режим используется как проходной лишь на посадке от момента выравнивания и до касания.
На планере полёт на 2-ом режиме не используется, поскольку это уже будет не полёт, а беспорядочное снижение по ступенчатой траектории. Кривые Жуковского применительно к планеру имеют вид одной кривой, которую можно изобразить как кривую углов планирования (рис.6).
Рис.6 Кривая планирования
⇐ Предыдущая111213141516171819Следующая ⇒ |
Дата добавления: 2015-05-08; Просмотров: 29604; Нарушение авторских прав?; Мы поможем в написании вашей работы!
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Vнв, Vэк, Maximum Range, Endurance и V-speeds
В данной статье разговор пойдет сразу о 8 скоростях (а точнее, восьми понятиях), использующихся в российской и зарубежной литературе по аэродинамике, и будет сделана попытка установить тождественность некоторых из них. А именно:
А именно:
Vэк = Speed for Maximum Endurance = Vx (ВАОС) = Speed for Minimum Rate of Descend
Vнв = Speed for Maximum Range = Vy (ROC) = Best Glide Speed (Vbg)
Вероятно, вы уже пытались разобраться в этих скоростях самостоятельно, читая авиационные форумы и разнообразные сайты в интернете. Как говорил известный персонаж Леонида Броневого: «Верить в наше время нельзя никому. Иногда даже самому себе. Мне – можно». 🙂
К сожалению, практически все форумные дискуссии на данную, довольно непростую, тему быстро переходят от аэродинамики на личности оппонентов. Искать крупицы истины в помоях, которыми незнакомые и часто малоквалифицированные люди поливают друг друга, занятие утомительное и малопродуктивное.
На самом деле, речь идет об установлении соответствия между принятыми российскими и западными терминами. Так как российская и западная школы много лет развивались обособленно друг от друга, было бы логично искать информацию по обе стороны океана. Чем я и занимался, упорно выедая мозг всем знакомым летчикам и инструкторам в Канаде на заданную тему.
Я начал думать, что если даже весьма опытные и заслуженные летчики не знают ответа на такой популярный вопрос, то, может быть, это и есть тот самый «magic», объясняющий, почему самолет летает, а крыльями не машет?
Рис. 1: Magic
Однажды я поделился своими сомнениями с Павлом Юрьевичем Калугиным, моим российским инструктором. Он меня сразу разочаровал, сказав, что чудес на свете не бывает, а бывает «Практическая Аэродинамика». Я задал ему тысячу вопросов (большинство из них – глупые) и получил ответы почти на все. Кроме этого, он снабдил меня соответствующей литературой. На основе всего этого была написана статья, которую вы читаете. Она содержит точные ссылки на использованные источники с указанием номеров страниц. При желании вы можете сами убедиться, что я не выдумал ничего нового, а только собрал разрозненные сведения воедино.
ВНИМАНИЕ: все нижесказанное справедливо только для самолетов с поршневыми двигателями. Аэродинамика самолетов с реактивными силовыми установками имеет массу принципиальных отличий. Вы сможете о них прочитать самостоятельно в приведенном мной учебнике А.А. Жаброва или других источниках.
КРИВЫЕ ЖУКОВСКОГО
Вообще говоря, выдумывать что-то новое и не требовалось. Все уже придумано выдающимися учеными прошлого, в частности, профессором Николаем Егоровичем Жуковским (1847 -1921), создавшим аэродинамику как науку. И хотя его огромный вклад в развитие авиации старательно замалчивается на Западе, предложенный им графо-аналитический метод анализа летных данных самолета (т.н. «кривые Жуковского») живет и побеждает.
Рис. 2: Н.Е. Жуковский
Существует ДВА вида кривых Жуковского (кривые тяг и мощностей). Вся хитрость в том, что рассматривать эти кривые нужно одновременно, имея возможность сопоставлять их друг с другом. Это будет сделано ниже, но начнем мы с аэродинамического сопротивления самолета.
ПОЛНОЕ АЭРОДИНАМИЧЕСКОЕ СОПРОТИВЛЕНИЕ
Известно, что полное аэродинамическое сопротивление самолета складывается из его лобового и индуктивного сопротивлений.
Лобовое сопротивление (parasite drag) зависит от лобового сопротивления фюзеляжа и других элементов конструкции самолета, их взаимного аэродинамического влияния и свойств обтекаемости материала обшивки. Лобовое сопротивление РАСТЕТ по мере УВЕЛИЧЕНИЯ скорости.
Индуктивное сопротивление (induced drag) является побочным продуктом создания подъемной силы и зависит от угла атаки крыла. Чем больше угол атаки, тем сильнее вектор полной аэродинамической силы крыла отклонен назад и тем больше индуктивное сопротивление. Чем меньше угол атаки, тем меньше индуктивное сопротивление.
Поскольку для полета на бОльших скоростях требуется меньший угол атаки, индуктивное сопротивление снижается по мере увеличения скорости и РАСТЕТ по мере ее УМЕНЬШЕНИЯ.
Если сложить два вида сопротивлений, лобовое и индуктивное, то мы получим полное аэродинамическое сопротивление (total drag). Графически это выглядит следующим образом:
Графически это выглядит следующим образом:
Рис. 3: Полное аэродинамическое сопротивление и его компоненты
ПОТРЕБНАЯ ТЯГА
Мы помним, что условием постоянства скорости в горизонтальном полете является равенство полного аэродинамического сопротивления (drag) и тяги самолета (thrust required), X = P. Действительно, чтобы скорость полета была постоянной, сила сопротивления должна преодолеваться силой тяги равной ей по величине. Поэтому рассмотренную выше кривую полного аэродинамического сопротивления можно считать также и кривой потребной тяги горизонтального полета (они равны друг другу).
НАИВЫГОДНЕЙШАЯ СКОРОСТЬ (Vнв)
Поскольку в нижней точке рассмотренной кривой полное аэродинамическое сопротивление минимально, самолету требуется минимум тяги для горизонтального полета. В этой же точке достигается максимальное качество самолета, которому соответствует наивыгоднейший угол атаки, α нв.
«Воздушная скорость, соответствующая этому углу атаки и минимальной потребной тяге <…> называется теоретически наивыгоднейшей скоростью горизонтального полета <. .>» (Жабров А.А. Теория полета и пилотирования самолета. — М.: ДОСААФ, 1959. — С. 123.).
.>» (Жабров А.А. Теория полета и пилотирования самолета. — М.: ДОСААФ, 1959. — С. 123.).
РЕЖИМ МАКСИМАЛЬНОЙ ДАЛЬНОСТИ (Speed for Maximum Range)
Раз при полете на наивыгоднейшей скорости требуется минимальная сила тяги, то совершаемая самолетом работа на 1 км пути минимальна, и удельный расход топлива (расход на 1 км пути) тоже должен быть минимальным. Таким образом, наивыгоднейшая скорость Vнв теоретически должна обеспечивать максимальную дальность полета. На практике, из-за того что двигатель работает с некоторыми потерями, минимальный удельный расход топлива достигается на несколько большей скорости, называемой «режимом максимальной дальности» (Жабров А.А. Теория полета и пилотирования самолета. — М.: ДОСААФ, 1959. — С. 124.).
Так как отличия рассмотренных скоростей незначительны, можно провести условное равенство между Vнв и «режимом максимальной дальности» (Speed for Maximum Range).
Vнв ≈ Speed for Maximun Range
Пришло время более подробно поговорить о кривых Жуковского. Прежде всего, как вы думаете, чего не хватает на рассмотренном выше графике потребной тяги? Чем вообще самолет отличается от планера? Правильно, наличием силовой установки. Т.е. у него есть не только потребная, но и располагаемая тяга. Именно эта кривая мистическим образом отсутствует на многих графиках в западных учебниках (как, например, на Рис. 3). Но мы исправим это упущение, воспользовавшись иллюстрациями из российской литературы. В данном случае, графиками тяг и мощностей из «Практической аэродинамики самолета Як-18Т», с которых я убрал все лишнее и добавил кое-что нужное (синим). Я также расположил графики друг над другом, приведя к единому масштабу и совместив по шкале скоростей. См. Рис. 4.
Прежде всего, как вы думаете, чего не хватает на рассмотренном выше графике потребной тяги? Чем вообще самолет отличается от планера? Правильно, наличием силовой установки. Т.е. у него есть не только потребная, но и располагаемая тяга. Именно эта кривая мистическим образом отсутствует на многих графиках в западных учебниках (как, например, на Рис. 3). Но мы исправим это упущение, воспользовавшись иллюстрациями из российской литературы. В данном случае, графиками тяг и мощностей из «Практической аэродинамики самолета Як-18Т», с которых я убрал все лишнее и добавил кое-что нужное (синим). Я также расположил графики друг над другом, приведя к единому масштабу и совместив по шкале скоростей. См. Рис. 4.
Рис. 4: Кривые Жуковского для тяг (вверху) и мощностей (внизу)
РАСПОЛАГАЕМАЯ ТЯГА
Как видно на верхнем графике, кривая располагаемой тяги Pр имеет наклон вправо. Это значит, что по мере увеличения скорости, располагаемая тяга УМЕНЬШАЕТСЯ. Что довольно странно, не правда ли?
На самом деле это объяснимо. Силовая установка неподвижного самолета производит максимальную тягу. По мере роста скорости эффективность пропеллера снижается. Он просто «не успевает цепляться» за несущийся навстречу воздух. Теоретически, при бесконечном увеличении скорости наступит момент, когда пропеллер вообще перестанет создавать тягу. При еще большей скорости уже встречный поток воздуха будет вращать двигатель, как ветряк. Подчеркну, что практически такое невозможно: и самолет, и двигатель разрушились бы значительно раньше. Но из этого примера должно быть понятно, почему тяга силовой установки уменьшается с ростом скорости.
Силовая установка неподвижного самолета производит максимальную тягу. По мере роста скорости эффективность пропеллера снижается. Он просто «не успевает цепляться» за несущийся навстречу воздух. Теоретически, при бесконечном увеличении скорости наступит момент, когда пропеллер вообще перестанет создавать тягу. При еще большей скорости уже встречный поток воздуха будет вращать двигатель, как ветряк. Подчеркну, что практически такое невозможно: и самолет, и двигатель разрушились бы значительно раньше. Но из этого примера должно быть понятно, почему тяга силовой установки уменьшается с ростом скорости.
Имейте в виду, что кривая располагаемой тяги это именно КРИВАЯ. Пусть график располагаемой тяги Як-18T, близкий к прямой линии, не вводит вас в заблуждение: это лишь частный случай и хорошая реализация винта изменяемого шага (constant speed propeller). Для силовых установок с винтами постоянного шага (такими как на Cessna 150 и Cessna 172) график располагаемой тяги имеет более затейливую форму, далекую от прямолинейной.
ПОТРЕБНАЯ И РАСПОЛАГАЕМАЯ МОЩНОСТЬ
Обратимся теперь к нижнему графику. На нем изображены кривые мощностей. Что такое мощность? Согласно определению, мощность это произведение силы (в нашем случае силы тяги) на секундную скорость. Например, в Википедии вы найдете такое определение мощности (для Механики): «скалярное произведение вектора силы на вектор скорости, с которой движется тело».
Раз так, то если мы умножим и потребную, и располагаемую тягу (Pп и Pр, верхний график) на скорость, мы получим потребную и располагаемую мощности (Nп и Nр, нижний график). Уточню, что для получения мощности в лошадиных силах результат придется также разделить на 0.75, но это уже детали.
Кривая потребной мощности говорит о том, какой минимальной мощности силовая установка нужна для достижения заданной скорости горизонтального полета. Сопоставляя с ней кривую располагаемой мощности, можно определить, какие скорости могут быть достигнуты, а также оценить избыток мощности силовой установки, имеющийся на каждой из этих скоростей.
При дальнейших рассуждениях важно помнить, что кривые мощностей являются производными от кривых тяг, чем и обусловлена «магическая взаимосвязь» обоих графиков, с которой мы столкнемся ниже.
НАИВЫГОДНЕЙШАЯ СКОРОСТЬ (Vнв.) НА КРИВЫХ ПОТРЕБНОЙ ТЯГИ И МОЩНОСТИ
Сопоставляя графики тяг и мощностей, можно увидеть, что наивыгоднейшая скорость Vнв является нижней точкой кривой потребной тяги и, одновременно, точкой перегиба кривой потребной мощности (обратите внимание на касательную, проведенную к ней из начала координат). В этой же точке, как говорилось выше, достигается минимальный удельный расход топлива (расход на 1 км пути).
ЭКОНОМИЧЕСКАЯ СКОРОСТЬ (Vэк)
На кривой потребной мощности можно найти также скорость, для полета на которой требуется минимальная мощность (нижняя точка кривой потребной мощности). Согласно определению, «скорость, соответствующая экономическому углу атаки и минимальной потребной мощности, называется экономической скоростью горизонтального полета» (Жабров А. А. Теория полета и пилотирования самолета. — М.: ДОСААФ, 1959. — С. 129.).
А. Теория полета и пилотирования самолета. — М.: ДОСААФ, 1959. — С. 129.).
РЕЖИМ МАКСИМАЛЬНОЙ ПРОДОЛЖИТЕЛЬНОСТИ ПОЛЕТА (Speed for Maximum Endurance)
Поскольку при полете на экономической скорости требуется минимальная мощность, моментальный (а также и часовой) расход топлива минимален. Следовательно, экономическая скорость Vэк теоретически должна обеспечивать максимальную продолжительность полета. На практике, как мы уже знаем, двигатель работает с некоторыми потерями, поэтому минимальный часовой расход достигается на несколько большей скорости, называемой «режимом максимальной продолжительности полета» (Жабров А.А. Теория полета и пилотирования самолета. — М.: ДОСААФ, 1959. — С. 129.).
Опять же, из-за того, что отличия этих скоростей незначительны, мы можем провести условное равенство между Vэк и «режимом максимальной продолжительности полета» (Speed for Maximum Endurance).
Vэк ≈ Speed for Maximun Endurance
ЭКОНОМИЧЕСКАЯ СКОРОСТЬ (Vэк) НА КРИВЫХ ПОТРЕБНОЙ ТЯГИ
Опять вернемся к графику потребной тяги и попробуем определить, какой его точке соответствует найденная нами экономическая скорость Vэк. Мы обнаружим, что если бы мы стали постепенно уменьшать режим двигателя (дросселируя его РУДом), кривая располагаемой тяги Pp начала бы смещаться вниз параллельно самой себе. Обратите внимание на верхнюю синюю линию: эта кривая имеет не одну, а две точки пересечения с кривой потребных тяг Pп. То есть, в определенном диапазоне существуют две разные скорости (и соответствующие им два разных угла атаки), полет на которых возможен на одном и том же режиме двигателя. К этому наблюдению мы вернемся ниже, а пока продолжим уменьшать режим, пока в один прекрасный момент кривые не пересекутся в одной, самой последней точке (нижняя синяя линия). Что это за точка?
Мы обнаружим, что если бы мы стали постепенно уменьшать режим двигателя (дросселируя его РУДом), кривая располагаемой тяги Pp начала бы смещаться вниз параллельно самой себе. Обратите внимание на верхнюю синюю линию: эта кривая имеет не одну, а две точки пересечения с кривой потребных тяг Pп. То есть, в определенном диапазоне существуют две разные скорости (и соответствующие им два разных угла атаки), полет на которых возможен на одном и том же режиме двигателя. К этому наблюдению мы вернемся ниже, а пока продолжим уменьшать режим, пока в один прекрасный момент кривые не пересекутся в одной, самой последней точке (нижняя синяя линия). Что это за точка?
В это сложно поверить, но факт: именно эта точка и будет соответствовать экономической скорости Vэк, найденной нами ранее на графике потребных мощностей. Это неудивительно, ведь экономическая скорость — это такая скорость, горизонтальный полет на которой возможен при минимальной мощности, а значит, и РЕЖИМЕ ДВИГАТЕЛЯ. Если бы мы еще немного прибрали режим, то неизбежно начали бы снижаться. Причем изменение угла атаки в любую сторону только ускорило бы это снижение, поскольку горизонтальный полет на минимальной мощности (режиме) возможен только на экономическом угле атаки.
Причем изменение угла атаки в любую сторону только ускорило бы это снижение, поскольку горизонтальный полет на минимальной мощности (режиме) возможен только на экономическом угле атаки.
ГРАНИЦА ПЕРВЫХ И ВТОРЫХ РЕЖИМОВ ПОЛЕТА
Диапазон скоростей, лежащих правее Vэк., в российской школе принято называть диапазоном «первых режимов» (а в западной – front side of power curve). В этом диапазоне для увеличения скорости полета необходима бОльшая мощность (режим двигателя), для уменьшения – меньшая. Все просто и логично. Иногда подчеркивается, что в диапазоне первых режимов высота полета выдерживается штурвалом, а скорость – режимом двигателя. Именно этот диапазон скоростей используется на протяжении почти всего полета, за исключением момента выдерживания и посадки, а также для некоторых прикладных задач и тренировочных упражнений.
Как нетрудно догадаться, все, что находится левее экономической скорости Vэк, называется диапазоном «вторых режимов» (или back side of power curve). В этом диапазоне действует обратное правило: при УМЕНЬШЕНИИ скорости полета требуется БОЛЬШАЯ мощность (режим). Также, в отличие от полета на первых режимах, здесь летчик управляет воздушной скоростью изменением угла атаки (т.е. действует штурвалом), а для выдерживания высоты увеличивает (или уменьшает) режим двигателя. Именно так выполняется тренировочное упражнение «полет на малой скорости» (Slow flight).
В этом диапазоне действует обратное правило: при УМЕНЬШЕНИИ скорости полета требуется БОЛЬШАЯ мощность (режим). Также, в отличие от полета на первых режимах, здесь летчик управляет воздушной скоростью изменением угла атаки (т.е. действует штурвалом), а для выдерживания высоты увеличивает (или уменьшает) режим двигателя. Именно так выполняется тренировочное упражнение «полет на малой скорости» (Slow flight).
На приведенных мной графиках (Рис. 4) диапазон вторых режимов выделен серым фоном.
Подведем промежуточные итоги для горизонтального полета:
| Vнв | Наивыгоднейший угол атаки, α нв. | Минимальная потребная тяга (P) | Минимальный удельный (километровый) расход топлива | Speed for Maximum Range |
| Vэк | Экономический угол атаки, α эк. | Минимальная потребная мощность (N) и РЕЖИМ ДВИГАТЕЛЯ | Минимальный моментальный (часовой) расход топлива | Speed for Maximum Endurance |
Мы видим, что:
Vэк = Speed for Maximum Endurance
Vнв = Speed for Maximum Range
Теперь можно перейти к рассмотрению набора высоты и связанных с ним скоростей Vx и Vy.
V-SPEEDS
В западной школе существует устойчивая традиция обозначать рекомендованные воздушные скорости и летные ограничения самолета буквой V с буквенным индексом или цифрой. Существует целое семейство так называемых V-Speeds, среди которых Vx, Vy, Vs, Va, Vne, Vfe, Vbg, Vr, Vmc и многие другие. Полный их список вы найдете здесь.
Нас сейчас интересуют две из них: Vx и Vy. Попытаемся понять, что это за скорости, когда они используются и как соотносятся со скоростями, рассмотренными выше.
Vx – это так называемая Best Angle of Climb Speed (BAOC), «the speed at which the airplane climbs most steeply, gaining the most altitude for distance covered over the ground». From the Ground Up. Ottawa: Aviation Publishers Co. Limited; 2000, стр. 276. ISBN 0-9680390-5-7).
Как следует из английского названия и определения, эта скорость обеспечивает максимальный УГОЛ НАБОРА высоты и позволяет получить максимальную высоту за единицу РАССТОЯНИЯ. Поэтому эта скорость используется при наличии препятствий по курсу взлета, которые нужно перелететь.
В этой статье Википедии вы прочтете, что Vx «is the speed at which the maximum excess thrust is available». То есть это скорость, при которой у самолета имеется максимальный ИЗБЫТОК ТЯГИ. Чему же равна эта скорость?
Обратимся к российскому учебнику и прочитаем: “Наибольший угол подъема будет при максимальном избытке тяги. Последний для винтовых самолетов соответствует скорости, близкой к экономической». <…>». (Жабров А.А. Теория полета и пилотирования самолета. — М.: ДОСААФ, 1959. — С. 150.).
Бинго!!! Мы только что выяснили, что Vx ≈ Vэк!
Сможете угадать, чему будет соответствовать Vy? Уверен, что да.
Vу – это так называемая Best Rate of Climb Speed (ROC), «the speed at which the airplane will gain the most altitude in the least time». (From the Ground Up. Ottawa: Aviation Publishers Co. Limited; 2000, стр. 276. ISBN 0-9680390-5-7).
Из названия и определения следует, что эта скорость обеспечивает максимальную СКОРОСТЬ НАБОРА высоты (т.е. вертикальную скорость) и позволяет получить максимальную высоту за единицу ВРЕМЕНИ.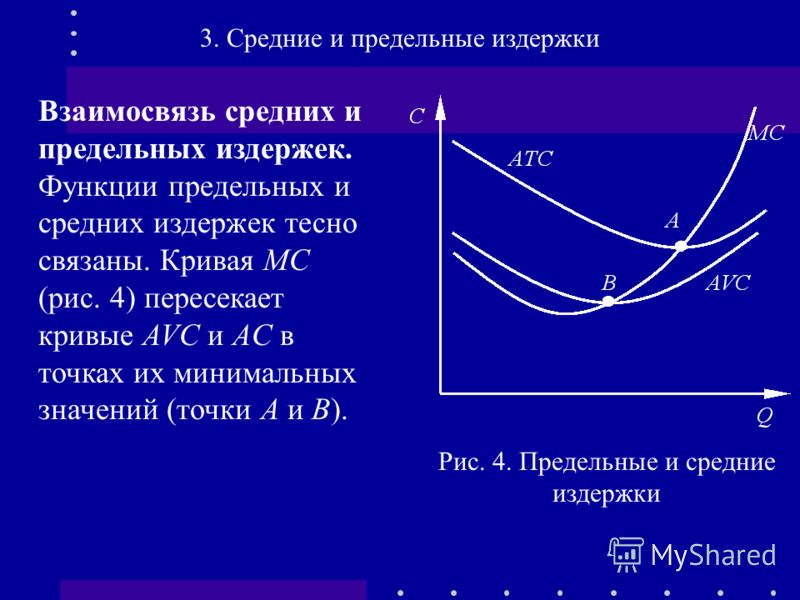
По-русски Vy называется «Наивыгоднейшая скорость набора».
Именно эта скорость используется при обычном взлете, ведь чем быстрее самолет отходит от земли, тем он безопаснее (больше возможностей для маневра в случае отказа двигателя). Кроме того, набирая скорость на Vy, самолет самым оптимальным образом использует полетное время и запас топлива, имея более высокую, по сравнению с набором на Vx, путевую скорость.
Заметим, что при необходимости выполнить взлет на Vx, после преодоления препятствий сразу же переходят к набору на Vy. Помимо прочего, эта скорость обеспечивает лучший обзор и охлаждение двигателя.
Vy (или ROC) соответствует скорости, при которой «the difference between engine power and the power required <…> is the greatest (maximum excess power)» (Википедия). То есть это скорость, на которой самолет обладает максимальным ИЗБЫТКОМ МОЩНОСТИ.
Опять обратимся к российскому учебнику и прочтем, что, действительно, «максимальная вертикальная скорость будет при максимальном избытке мощности». А «максимальной избыток мощности получается приблизительно на наивыгоднейшей скорости». (Жабров А.А. Теория полета и пилотирования самолета. — М.: ДОСААФ, 1959. — С. 152.).
А «максимальной избыток мощности получается приблизительно на наивыгоднейшей скорости». (Жабров А.А. Теория полета и пилотирования самолета. — М.: ДОСААФ, 1959. — С. 152.).
Следовательно, Vy ≈ Vнв.
Здесь, также как и в предыдущих случаях, определение предполагает некоторую неточность («приблизительно»). Это обусловлено тем, что мир несовершенен и создание идеального пропеллера и силовой установки технически невозможно. Тем не менее, скорости эти достаточно близки, чтобы считать их равными для практического применения на практике, что все и делают.
Вот мы и установили тождественность шести скоростей, используемых в горизонтальном полете и наборе высоты:
Vэк = Vx = Speed for Maximum Endurance
Vнв = Vy= Speed for Maximum Range
Займемся теперь снижением самолета. Удивительно, но здесь нам опять предстоит встреча двумя скоростями. Это какое-то колдовство, не иначе. 🙂
СКОРОСТЬ МАКСИМАЛЬНОЙ ДАЛЬНОСТИ ПЛАНИРОВАНИЯ (Best Glide Speed или Vbg)
Максимальная дальность планирования самолета (т. е. снижения с минимальной или отсутствующей тягой двигателя) будет достигнута при минимальном угле наклона траектории полета к горизонту. Взгляните на Рис. 5:
е. снижения с минимальной или отсутствующей тягой двигателя) будет достигнута при минимальном угле наклона траектории полета к горизонту. Взгляните на Рис. 5:
Рис. 5: Снижение самолета
Очевидно, что чем меньше угол Θ, тем дальше спланирует самолет с определенной высоты. От чего зависит этот угол? Только от качества самолета K, которое, как мы знаем, является максимальным при полете на наивыгоднейшем угле атаки. «<…> минимальный угол планирования получим при максимальном качестве (т.е. при наивыгоднейшем угле атаки)». (Жабров А.А. Теория полета и пилотирования самолета. — М.: ДОСААФ, 1959. — С. 166.)
Выше уже говорилось о том, что наивыгоднейшему углу атаки соответствует наивыгоднейшая скорость Vнв. Поскольку это справедливо для всех режимов полета, то:
Best Glide Speed (Vbg) = Vнв
ПЕРВЫЕ И ВТОРЫЕ РЕЖИМЫ ПЛАНИРОВАНИЯ
Интересно, что «границей между первыми и вторыми режимами является планирование на наивыгоднейшем угле атаки (т. е. режим наиболее пологого планирования)». (Жабров А.А. Теория полета и пилотирования самолета. — М.: ДОСААФ, 1959. — С. 171.) Мы помним, что наивыгоднейший угол атаки соответствует Vнв, значит именно Vнв является границей первых и вторых режимов планирования. Заметьте, что если для горизонтального полета и набора высоты границей режимов является Vэк, то для для планирования — Vнв. Лучше это запомнить.
(Жабров А.А. Теория полета и пилотирования самолета. — М.: ДОСААФ, 1959. — С. 171.) Мы помним, что наивыгоднейший угол атаки соответствует Vнв, значит именно Vнв является границей первых и вторых режимов планирования. Заметьте, что если для горизонтального полета и набора высоты границей режимов является Vэк, то для для планирования — Vнв. Лучше это запомнить.
Поведение самолета на вторых режимах при планирования имеет те же особенности: ухудшение устойчивости и управляемости, а также «обратная управляемость», когда при увеличении угла атаки скорость снижения не уменьшается, а увеличивается и самолет начинает «проседать». При достижении критического угла атаки это явление еще более усиливается и называется «парашютированием». По сути, это сваливание (Stall), при котором летчик, сильно выбрав штурвал на себя, искусственно удерживает самолет на закритическом угле атаки. Самолет, летящий на таком режиме крайне неустойчив, т.к. стремиться завалиться на крыло с последующим входом в спираль или штопорное вращение. Поэтому планирование на вторых режимах допускается выполнять только на безопасной высоте.
Поэтому планирование на вторых режимах допускается выполнять только на безопасной высоте.
МИНИМАЛЬНАЯ СКОРОСТЬ СНИЖЕНИЯ
Нам остается разобраться с еще одной скоростью, но зато с такой, вокруг которой образовалась некоторая понятийная чехарда. Начнем с того, что вертикальную скорость самолета в российской аэродинамике принято обозначать как Vy («скорость по вертикальной оси Y»). Это обозначение внешне совпадает, но по смыслу не имеет ничего общего с принятым в западной школе Vy (для Maximum Rate Of Climb Speed), которое мы обсуждали выше. Так что всегда, когда речь идет о Vy, следует обращать внимание на контекст. В данном случае мы говорим о вертикальной скорости при планировании или «скорости снижения» самолета.
ВОЗДУШНАЯ СКОРОСТЬ ПРИ МИНИМАЛЬНОЙ СКОРОСТИ СНИЖЕНИЯ (Minimum Rate of Descend Speed)
Планируя, самолет преодолевает сопротивление воздуха, т. е. совершает работу за счет накопленной потенциальной энергии. Выполняемая работа равна произведению его веса на высоту, которую он теряет в единицу времени.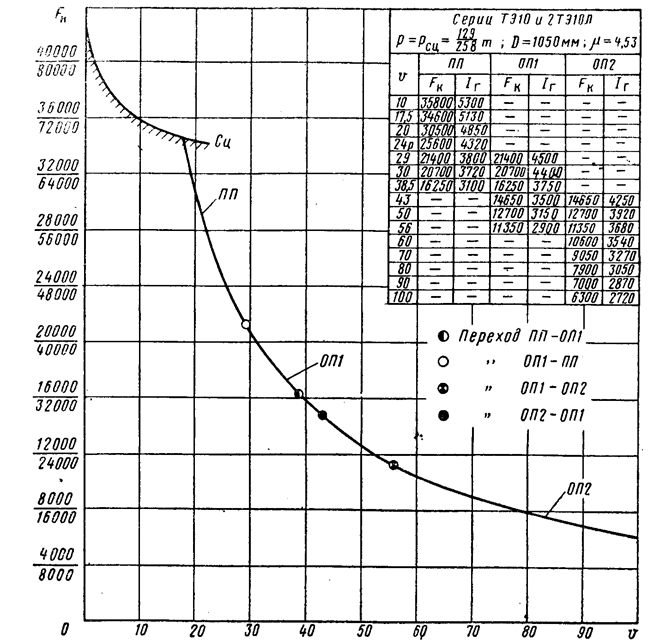 При минимальной скорости снижения эта работа будет минимальна, следовательно, на ее выполнение будет расходоваться минимальная мощность, а это имеет место лишь при полете на экономическом угле атаки и Vэк. «Итак, минимальную вертикальную скорость планирования получим, планируя с экономической скоростью горизонтального полета». (Жабров А.А. Теория полета и пилотирования самолета. — М.: ДОСААФ, 1959. — С. 169.)
При минимальной скорости снижения эта работа будет минимальна, следовательно, на ее выполнение будет расходоваться минимальная мощность, а это имеет место лишь при полете на экономическом угле атаки и Vэк. «Итак, минимальную вертикальную скорость планирования получим, планируя с экономической скоростью горизонтального полета». (Жабров А.А. Теория полета и пилотирования самолета. — М.: ДОСААФ, 1959. — С. 169.)
Таким образом, мы выяснили, что:
Minimum Rate of Descend Speed = Vэк
ИТОГО:
Vэк = Vx = Speed for Maximum Endurance = Speed for Minimum Rate of Descend |
Vнв = Vy= Speed for Maximum Range = Best Glide Speed (Vbg) |
Ну, а кто не верит в это и хочет выловить таинственного «мэджика» самостоятельно – район поисков я обозначил! 🙂
Посмотри, как он летает
Джон С. |
 Денкер
ДенкерПосмотри, как он летает
Новый взгляд на восприятие, процедуры и принципы полета. |
Существует также безопасная версия этой страницы.
Содержимое
- Введение
- Читательская аудитория, темы и цели
- Как пользоваться этой книгой
- Нецели
- Благодарности
- 1 Осведомленность об энергопотреблении и управление энергопотреблением
- 1.1 Энергия не может быть создана или уничтожена
- 1.2 Преобразование энергии
- 1.2.1 Преобразование скорости в высоту и обратно
- 1.2.2 Энергия на единицу массы
- 1.2.3 Преобразование топлива в высоту
- 1.2.4 Мощность в сравнении с энергией
- 1.2.5 Перетаскивание и кривая мощности — введение
- 1.2.6 Скорость преобразования энергии
- 1.
 3 Влияние контроля на энергопотребление
3 Влияние контроля на энергопотребление- 1.3.1 Бюджет мощности — использование ядра
- 1.3.2 Эффект дроссельной заслонки
- 1.3.3 Эффекты ига
- 1.3.4 Размеры резервуаров энергии
- 1.4 Стратегия управления энергопотреблением
- 1.5 Дополнительное обсуждение
- 1.6 Краткая информация: управление энергопотреблением
- 2 Осознание угла атаки и управление углом атаки
- 2.1 Важность угла атаки
- 2.2 Определение угла атаки
- 2.3 Трим для угла атаки!
- 2.4 Три фактора, влияющие на угол атаки
- 2.5 Угол наклона восприятия
- 2.6 Внесение изменений в угол атаки
- 2.7 Летайте легким прикосновением
- 2.8 Обрезка не решит всех мировых проблем
- 2.9 Отношение тангажа к углу атаки
- 2.10 Мощность плюс отношение не равно производительности
- 2.11 Подробнее о кривой мощности
- 2.12 Оценка относительного ветра
- 2. 13 Воздушная скорость связана с углом атаки
- 2.13.1 Воздушная скорость в зависимости от коэффициента подъемной силы
- 2.13.2 Коэффициент подъемной силы в зависимости от угла атаки
- 2.13.3 Коррекция пониженной плотности
- 2.13.4 Корректировка требований к уменьшенной подъемной силе
- 2.13.5 Корректировка повышенных требований к подъемной силе
- 2.13.6 Оценка эталонной скорости захода на посадку (простой случай)
- 2.13.7 Подробнее о калибровке воздушной скорости (не так просто)
- 2.13.8 Коррекция скольжения
- 2.13.9 Соотношение перетаскивания и подъемной силы к перетаскиванию
- 2.14 Не все зависит от угла атаки
- 2.14.1 Явные ограничения воздушной скорости
- 2.14.2 Скорость маневрирования
- 2.14.3 Обзор ограничений и показателей производительности
- 2.15 Абсолютный и геометрический угол атаки
- 2.16 Резюме
- 3 Аэродинамические поверхности и воздушный поток
- 3. 1 Самолет и воздух
- 3.2 Схемы течения вблизи крыла
- 3.3 Модели давления вблизи крыла
- 3.4 Продувка вверх и Продувка вниз
- 3.5 Кривизна линии потока
- 3.6 Принцип Бернулли
- 3.6.1 Величина
- 3.6.2 Высотомеры; Статическое и стагнационное давление
- 3.6.3 Сжимаемость
- 3.7 Устройства предупреждения о остановке
- 3.8 Воздух – это жидкость, а не пуля
- 3.9 Другие заблуждения
- 3.10 Перевернутый полет, криволинейные и симметричные аэродинамические поверхности
- 3.11 Тонкие крылья
- 3.12 Тираж
- 3.12.1 Визуализация циркуляции
- 3.12.2 Сколько тираж? Состояние Кутты
- 3.12.3 Сколько подъема? Теорема Кутта-Жуковского
- 3.12.4 Количественная оценка тиража
- 3.13 Механически индуцированная циркуляция
- 3.14 Подъем требует циркуляции и вихрей
- 3.14.1 Вихри
- 3. 14.2 Турбулентность в следе
- 3.14.3 Индуцированное сопротивление
- 3.14.4 Взлет в мягком поле
- 3.14.5 Эффект заземления
- 3.14.6 Связанный вихрь
- 3.15 Мороз на крыльях
- 3.16 Непротиворечивые (не совокупные) законы физики
- 3.17 Краткий обзор: Как крыло создает подъемную силу
- 3.
- 4 Подъем, тяга, вес и сопротивление
- 4.1 Определения
- 4.2 Баланс сил
- 4.3 Силы во время поворота
- 4.4 Типы перетаскивания
- 4.5 Коэффициенты, силы и мощность
- Коэффициенты
- Силы
- Пауэрс
- 4.6 Индуцированное и паразитное сопротивление
- 5 Вертикальное демпфирование, демпфирование крена и опрокидывание
- 5.1 Введение и обзор
- 5.2 Вертикальное демпфирование
- 5.2.1 Происхождение вертикального демпфирования
- 5.2.2 Потеря вертикального демпфирования
- 5. 3 Стойло
- 5.3.1 Определение остановки
- 5.3.2 Полет за пределы срыва?
- 5.4 Демпфирование крена
- 5.4.1 Происхождение демпфирования валков
- 5.4.2 Потеря демпфирования крена
- 5.4.3 Схемы увеличения демпфирования качения
- 5.5 Эффект закрылков
- 5.5.1 Влияние на скорость остановки
- 5.5.2 Влияние на заболеваемость
- 5.5.3 Влияние на вымывание
- 5.5.4 Эффект при перетаскивании
- 5.5.5 Влияние на обрезку
- 5.5.6 Влияние на максимальную скорость
- 5.6 Сводка
- 6 Угол атаки, устойчивость, триммер и пикирование по спирали
- 6.1 Основной принцип стабильности
- 6.1.1 Безделье с кредитным плечом
- 6.1.2 Другие летающие объекты не похожи
- 6.1.3 Центр масс слишком далеко позади
- 6.1.4 Центр масс рядом с серединой
- 6.1.5 Центр масс, подъемная сила и площадь
- 6. 1.6 Равновесие по тону
- 6.1.7 Утки работают по тому же принципу
- 6.1.8. Помимо декаляции
- 6.1.9 Пружины и бобышки
- 6.1.10 Эффект длинного хвоста
- 6.1.11 Центр масс слишком далеко вперед
- 6.1.12 Другие режимы отказа
- 6.1.13 Практические соображения
- 6.1.14 Фугоидные колебания
- 6.2 Спиральное погружение
- 6.2.1 Какой путь вверх?
- 6.2.2 Обзор
- 6.2.3 Общее обсуждение
- 6.2.4 Восстановление после погружения по спирали
- 6.2.5 Попробуйте сами
- 6.3 Сводка
- 6.1 Основной принцип стабильности
- 7 Подробнее об энергии и мощности
- 7.1 Введение
- 7.2 Внесение изменений в воздушную скорость
- 7.2.1 Передняя сторона кривой мощности
- 7.2.2 Обратная сторона кривой мощности
- 7.2.3 Правильные и неправильные процедуры
- 7.3 Во время круиза вам многое сойдет с рук
- 7. 4 Пусть «Джордж» сделает это
- 7.5 Максимальная производительность с использованием кривой мощности
- 7.5.1 Откалиброванная воздушная скорость в сравнении с истинной воздушной скоростью
- 7.5.2 Лучшая скорость набора высоты
- 7.5.3 Минимальная скорость горизонтального полета
- 7.5.4 Лучший угол подъема
- 7.5.5 Мощность зависит от высоты через истинную скорость полета
- 7.5.6 Другие эффекты мощности и высоты
- 7.5.7 Лучшее планирование: ветер, нисходящие потоки и т. д.
- 7.5.8 Влияние веса
- 7.5.9 Центр Mass Effects
- 7.6 Изменения кривой мощности
- 7.6.1 Кривая мощности зависит от соотношения сторон
- 7.6.2 Чертеж кривой
- 7.6.3 Немного теории
- 7.6.4 Требования к питанию в зависимости от скорости
- 7.6.5 Требования к питанию в зависимости от высоты над уровнем моря
- 7.7 Трюки управления энергией
- 7. 7.1 Скоростной крутой спуск
- 7.7.2 Крутой спуск на низкой скорости
- 7.
- 7.8 Сводка
- 8 Бюджет крутящего момента по рысканию
- 8.1 Обзор
- 8.2 Устойчивость к рысканию
- 8.3 Демпфирование рыскания
- 8.4 Спиральная шайба
- 8,5 P-фактор
- 8.5.1 Скорость отвала
- 8.5.2 Угол отвала
- 8.5.3 Начальный разбег
- 8.5.4 Соблюдение P-фактора
- 8.6 Гироскопическая прецессия
- 8.7 Наклонный двигатель
- 8.8 Вращение Propwash по рысканию
- 8.9 Использование руля направления во время бочки
- 8.9.1 Анализ рулона
- 8.9.2 Дизайнерские хитрости
- 8.9.3 Два режима и четыре зоны
- 8.9.4 Кратковременное нежелательное рыскание
- 8.9.5 Устойчивое неблагоприятное рыскание – подъем с крутым поворотом
- 8.9.6 Инерция по рысканью
- 8.9.7 Требуемая величина руля
- 8. 9.8 Краткий обзор: скоординированные процедуры поворота
- 8.10 Скольжение с длинным хвостом
- 8.11 Поворот лодки
- 8.12 Плохая ориентация во время руления
- 8.13 Асимметричная тяга
- 8.14 Бюджет крутящего момента по рысканью — сводка
- 9 Бюджет крутящего момента по рулону
- 9.1 Двугранный
- 9.2 Другие формы скользящих роликовых муфт
- 9.3 Стабильность при вращении
- 9.4 Дифференциал скорости законцовки крыла; Овербанкинг
- 9.5 Крутящий момент из-за сопротивления гребного винта
- 9.6 Инерция двигателя
- 9.7 Повороты с подъемом и спуском
- 9.8 Бюджет крутящего момента по рулону — сводка
- 10 Равновесие, устойчивость и демпфирование
- 10.1 Равновесие
- 10.2 Стабильность
- 10.3 Демпфирование
- 10.4 Связь между статической устойчивостью и демпфированием
- 10,5 Олео-пневматические стойки
- 10. 6 Колебания
- 10.6.1 Анализ голландского ролла
- 10.6.2 Как бороться с колебаниями
- 10.7 Стабильность и управляемость
- 11 Накладки, салазки и стопорные ролики
- 11.1 Урок по Snap Rolls
- 11.2 Ситуация с уклоном и маневр с уклоном
- 11.3 Определение угла скольжения
- 11.4 Полозья
- 11.4.1 Определение и объяснение
- 11.4.2 Нижний руль направления: правый и неправильный
- 11.5 Преднамеренные промахи
- 11.5.1 Обзор
- 11.5.2 Общие положения
- 11.5.3 Пробуксовка увеличивает скорость сваливания
- 11.5.4 Проскальзывание может нарушить работу системы Пито/Статики
- 11.5.5 Поворотные накладки
- 11.5.6 Скольжение влево и вправо
- 11.5.7 Боковое скольжение – или нет
- 11.6 Предвидеть правильное использование руля направления
- 11.7 Восприятие скольжения, восприятие координации
- 11. 7.1 Глядя в сторону
- 11.7.2 Вид спереди
- 11.7.3 Использование шарика инклинометра
- 11.7.4 Использование сиденья штанов
- 11.7.5 Преднамеренные промахи
- 11.7.6 Угол скольжения в зависимости от угла крена
- 11.
- 11.8 Сводка
- 12 Посадка
- 12.1 Планирование подхода
- 12.1.1 Другие вопросы планирования
- 12.1.2 Трафик
- 12.1.3 Расстояние от препятствий
- 12.2 Оценка слева или справа
- 12.3 Оценка высокого или низкого уровня; Практическое правило
- 12.4 Оценка тангажа и угла атаки
- 12.4.1 Использование внешних ссылок и обрезка
- 12.4.2 Наблюдайте и контролируйте более чем одну вещь
- 12.4.3 Корректировка для ветра
- 12.5 Другое восприятие
- 12.6 Базовая «Нормальная» посадка
- 12.6.1 Краткий финал
- 12.6.2 Раструб
- 12.6.3 Круглое закругление, а не прямоугольное расширение
- 12. 6.4 Расчет времени вспышки
- 12.6.5 Приземление и развертывание
- 12.7 Высокоэффективная посадка
- 12.7.1 Выберите правильную взлетно-посадочную полосу
- 12.7.2 Используйте правильную конфигурацию
- 12.7.3 Касание в нужной точке
- 12.7.4 Приземление на низкой скорости
- 12.7.5 Использование тормозов
- 12.7.6 Резюме: высокоэффективная посадка
- 12.8 Посадка с мягким полем
- 12.9 Посадка при боковом ветре
- 12.9.1 Основы
- 12.9.2 Приоритеты выравнивания
- 12.9.3 Процедуры выравнивания
- 12.9.4 Вспышка и приземление
- 12.9.5 Посадка с боковым ветром на уровне крыльев
- 12.10 Обход
- 12.11 Учимся садить самолет
- 12.11.1 Маневр по отношению к краю
- 12.11.2 Скоростное руление; Режим дорожного бегуна
- 12.11.3 Практика маневрирования на высоте
- 12. 11.4 Практика выравнивания и сваливания на высоте
- 12.11.5 Практика руления на высокой скорости
- 12.11.6 Практика полета в условиях взлетно-посадочной полосы
- 12.11.7 Сначала изучите процедуру мягкого поля
- 12.11.8 Развертывание с высоким носом
- 12.11.9 Восстановление после злого масштабирования
- 12.11.10 Спасение несовершенной вспышки
- 12.12 Летайте легким прикосновением
- 12.13 Критика собственных лендингов
- 12.1 Планирование подхода
- 13 Взлет
- 13.1 Простейший взлет
- 13.2 Нормальный взлет
- 13.3 Взлет с препятствиями
- Скимминг по сравнению с тачкой или хлопком
- 13.4 Взлет в мягком поле
- 13.5 Техника бокового ветра
- 13.6 Многодвигательный взлет
- 13.7 Планирование и принятие решений
- 13.7.1 Планирование взлета
- 13.7.2 Использование контрольного списка
- 13.7.3 Мониторинг взлетных характеристик (неверно)
- 13. 7.4 Мониторинг взлетных характеристик (справа)
- 13.7.5 Причины снижения мощности
- 13.7.6 Планирование и отработка отклоненных взлетов
- 13.7.7 После отрыва: стартовый набор высоты
- 13.8 Другие элементы взлета
- 13.9 Резюме
- 14 Полеты по пересеченной местности
- 14.1 Лоцманская проводка
- 14.1.1 Аэропорты — хорошие ориентиры
- 14.1.2 Выбор отличительных ориентиров
- 14.1.3 Изгибы
- 14.1.4 Навигация, основанная на реальности
- 14.2 Точный расчет
- 14.2.1 Курс
- 14.2.2 Расстояние, время и скорость полета
- 14.2.3 Поправка на боковой ветер
- 14.2.4 Треугольник ветра
- 14.2.5 Обсуждение
- 14.3 Навигация по инструментам
- 14.3.1 Не увлекайтесь измерительными приборами
- 14.3.2 Навигационные системы (краткий обзор)
- 14.3.3 Предполагаемый заголовок
- 14. 4 Методы VOR
- 14.4.1 Расстояние вне трассы
- 14.4.2 Подход к станции
- 14.4.3 Прогресс по курсу
- 14.4.4 Скрученные VOR
- 14.5 Комбинированные методы
- 14.6 Не потеряться
- 14.7 Как не потеряться
- 14.7.1 Основы
- 14.7.2 Если сомневаетесь, поднимайтесь
- 14.7.3 GPS или ЛОРАН
- 14.7.4 VOR Cross Radial или VOR/DME
- 14.7.5 Спросите диспетчера
- 14.8 Планирование полета
- 14.1 Лоцманская проводка
- 15 Экстренные процедуры
- 15.1 Действия в чрезвычайных ситуациях
- 15.2 Процедуры отключения двигателя
- 15.2.1 Контрольный список для чрезвычайных ситуаций
- 15.2.2 Опустите нос
- 15.2.3 Настройка для Glide
- 15.2.4 Вернуться в аэропорт?
- 15.2.5 Выберите поле
- 15.2.6 Подход с отключением питания
- 15.2.7 Скимминг в режиме Ground Effect
- 15.2.8 Аварийное приземление
- 15. 3 Предотвращение чрезвычайных ситуаций
- 15.3.1 Запасы безопасности
- 15.3.2 Управление подачей топлива
- 16 Маневр полета
- 16.1 Основы
- 16.2 Обнаружение и предотвращение другого трафика
- 16.3 Ускорение и замедление
- 16.4 Фугоиды
- 16,5 оборотов
- 16.6 Упражнение на координацию: раскачивание крыльев
- 16.7 Плашки с постоянным курсом
- 16.8 Крабы вдоль дороги
- 16.9 Скольжение по дороге
- 16.10 Скольжение по дороге или нет
- 16.11 Ознакомительные упражнения; Изменения конфигурации
- 16.12 Переход на быстрые и сложные воздушные суда
- 16.13 Повороты вокруг точки
- 16.14 Восьмерки вокруг пилонов
- 16.15 Люстры
- 16.16 Ленивые восьмерки
- 16.17 Восьмерки и повороты на пилонах
- 16.17.1 Предварительные сведения
- 16.17.2 Повороты на пилоне
- 16. 17.3 Восьмерки на пилонах
- 16.18 Смена встречного и попутного ветра
- 16.18.1 Устойчивый ветер
- 16.18.2 Эффект альбатроса: ветры, меняющиеся с высотой
- 16.18.3 Сдвиг ветра при заходе на посадку и отбытии
- 16.18.4 Разворот по ветру; Энергетический бюджет
- 16.18.5 Краткий обзор раздела: встречный и попутный ветер
- 16.19 Стратегия опорной точки
- 16.19.1 Учет ветра
- 16.19.2 Стратегия входа
- 16.19.3 Визуальная ссылка
- 16.19.4 Контрольный список
- 16.20 Медленный полет
- 16.20.1 Воздушная скорость и высота над уровнем моря
- 16.20.2 Рыскание и крен
- 16.20.3 Процедуры и восприятия
- 16.21 Тренировка в киоске
- 16.21.1 Предварительные сведения
- 16.21.2 Провоцирование явной остановки
- 16.21.3 Восстановление после остановки
- 16.21.4 Остановки при включении питания
- 16. 21.5 Ускоренные остановки
- 16.21.6 Злые масштабы
- 16.22 Восстановление после перевернутого отношения
- 17 Многомоторный полет
- 17.1 Сценарии отказа двигателя
- 17.1.1 Взлет
- 17.1.2 Подъем
- 17.1.3 Координация
- 17.1.4 Восприятие и первоначальная реакция
- 17.1.5 Контроль рыскания на пониженных скоростях
- 17.1.6 Минимальная контрольная скорость — определения
- 17.1.7 Влияние высоты над уровнем моря, веса и т. д.
- 17.1.8 Влияние центра масс
- 17.1.9 Эффект сопротивления (например, шасси)
- 17.1.10 Управление вращением
- 17.1.11 Критический двигатель
- 17.2 Процедуры отключения двигателя
- 17.2.1 Основные сведения о взлете
- 17.2.2 Сбалансированная длина поля; Скорость принятия решения о взлете
- 17.2.3 Процедура: Низкая высота
- 17.2.4 Процедура: большая высота
- 17. 2.5 Управление воздушной скоростью
- 17.2.6 Уход на второй круг при выключенном двигателе
- 17.2.7 Демонстрация работы двигателя на малых оборотах
- 17.1 Сценарии отказа двигателя
- 18 киосков и спинов
- 18.1 Остановки: причины и следствия
- 18.2 Тормозящая часть по сравнению со всем крылом
- 18.3 Граничные слои
- 18.3.1 Отдельный и присоединенный поток
- 18.3.2 Ламинарный и турбулентный потоки
- 18.3.3 Управление пограничным слоем
- 18.3.4 Резюме: турбулентность и пограничные слои
- 18.4 Эффект Коандо и т. д.
- 18.4.1 Папиросная бумага Демонстрация
- 18.4.2 Разрушение пограничного слоя
- 18.4.3 Демонстрация чайной ложки
- 18.4.4 Ошибочная модель производства лифтов
- 18.4.5 Факт против заблуждения
- 18,5 Спин Вход
- 18.6 Типы вращения
- 18.6.1 Режимы отжима
- 18.6.2 Самары, плоские вращения и центробежная сила
- 18. 6.3 Исследования вращения НАСА
- 18.6.4 Эффекты изменения ориентации вращения
- 18.7 Восстановление после вращения
- 18.8 Не связывайтесь со спинами
- 19Законы движения
- 19.1 Прямолинейное движение
- 19.1.1 Первый закон
- 19.1.2 Второй закон
- 19.1.3 Третий закон
- 19.1.4 Два понятия ускорения
- 19.1.5 Сила — это не движение
- 19.2 Импульс в воздухе
- 19.3 Сидение во вращающейся раме
- 19.4 Перемещение во вращающейся рамке
- Масштаб эффекта
- 19,5 Центрифуги с и без гравитации
- 19.5.1 Центробежное поле столь же реально, как и гравитация
- 19.5.2 Центрифуга
- 19.5.3 Центрифуга и сила тяжести
- 19.6 Центробежные эффекты во вращающемся самолете
- 19.7 Углы и повороты
- 19.7.1 Оси и плоскости вращения: рысканье, тангаж и крен
- 19. 7.2 Отношение: Заголовок, Шаг, Банк
- 19.7.3 Угловая терминология
- 19.7.4 Рыскание не пересекается с тангажом
- 19.7.5 Yaw не взаимодействует с банком
- 19,8 Крутящий момент и момент
- 19,9 Угловой момент
- 19.10 Гироскопы
- 19.10.1 Прецессия
- 19.10.2 Прецессия: в какую сторону и сколько
- 19.10.3 Инерционная платформа
- 19.11 Гироскопические инструменты
- 19.11.1 Индикатор курса
- 19.11.2 Искусственный горизонт
- 19.11.3 Гироскоп скорости поворота
- 19.12 Некоторые тонкости об энергии и энергосбережении
- 19.12.1 Наречие «Энергия»
- 19.12.2 Наречие «Консервация»
- 19.12.3 Энергия против энтропии
- 19.1 Прямолинейное движение
- 20 Атмосфера
- 20.1 Циркуляция вокруг фронтов и центров низкого давления
- 20.1.1 Обтекание минимума
- 20.1.2 Передние и нижние части
- 20. 2 Давление и ветер на высоте
- 20.2.1 Термический градиент ветра
- 20.2.2 Высотомер
- 20.2.3 Ошибки высотомера
- 20.2.4 Высокий высотомер из-за низкой температуры
- 20.3 Преобладающие ветры и сезонные ветры
- 20.3.1 Первичные модели циркуляции
- 20.3.2 Континентальные/океанические узоры
- 20.4 Сводка
- 20.1 Циркуляция вокруг фронтов и центров низкого давления
- 21 Командир воздушного судна Принятие решений
- 21.1 Принятие решений в целом
- 21.2 Принятие решений во время уроков
- 21.2.1 Действуйте в качестве PIC во время уроков
- 21.2.2 Как ваша рабочая нагрузка?
- 21.2.3 Я понял
- 21.2.4 Капотные работы
- 21.3 Уровни безопасности
- 21.4 Пример: расстояние до препятствий
- 21.5 Схема потока
- 21.6 Контрольные списки
- 21.7 Персональные минимумы
- 21.8 Скептицизм; Четкое выполнение плана Б
- 21. 9 Лидерство и управление ресурсами
- 21.10 Обучение на протяжении всей жизни
- 21.10.1 Узнайте, как учиться, как запоминать и как думать
- 21.10.2 Проклятие размерности
- 21.10.3 Критическое мышление
- 21.10.4 Учиться на опыте других
- 21.11 Попробуйте превзойти себя
- 22 Библиография
- 23 О книге и т. д.
- 23.1 О книге
- 23.2 О веб-сайте
- 23.3 Настройка и устранение неполадок вашего браузера
- 23.4 Уведомление — Инструкции — Условия продажи
- Об авторе
- Индекс
 3 Влияние контроля на энергопотребление
3 Влияние контроля на энергопотребление 13 Воздушная скорость связана с углом атаки
13 Воздушная скорость связана с углом атаки 1 Самолет и воздух
1 Самолет и воздух 14.2 Турбулентность в следе
14.2 Турбулентность в следе 3 Стойло
3 Стойло 1.6 Равновесие по тону
1.6 Равновесие по тону 4 Пусть «Джордж» сделает это
4 Пусть «Джордж» сделает это 7.1 Скоростной крутой спуск
7.1 Скоростной крутой спуск 9.8 Краткий обзор: скоординированные процедуры поворота
9.8 Краткий обзор: скоординированные процедуры поворота 6 Колебания
6 Колебания 7.1 Глядя в сторону
7.1 Глядя в сторону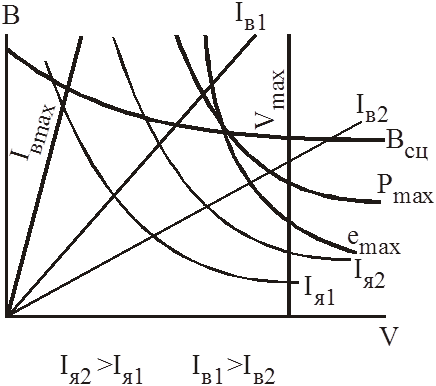 6.4 Расчет времени вспышки
6.4 Расчет времени вспышки 11.4 Практика выравнивания и сваливания на высоте
11.4 Практика выравнивания и сваливания на высоте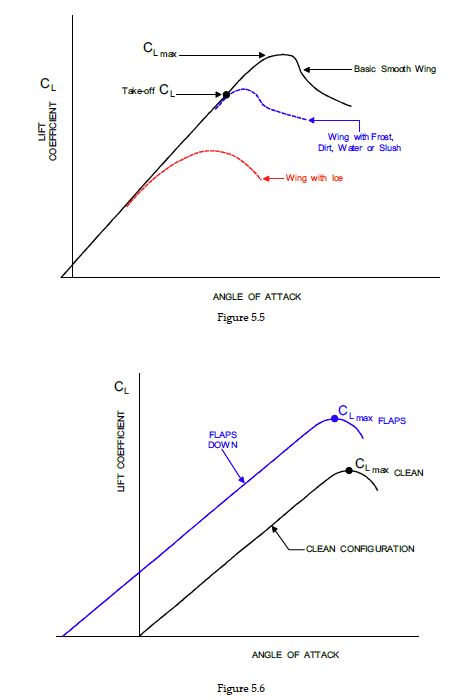 7.4 Мониторинг взлетных характеристик (справа)
7.4 Мониторинг взлетных характеристик (справа) 4 Методы VOR
4 Методы VOR 3 Предотвращение чрезвычайных ситуаций
3 Предотвращение чрезвычайных ситуаций 17.3 Восьмерки на пилонах
17.3 Восьмерки на пилонах 21.5 Ускоренные остановки
21.5 Ускоренные остановки 2.5 Управление воздушной скоростью
2.5 Управление воздушной скоростью 6.3 Исследования вращения НАСА
6.3 Исследования вращения НАСА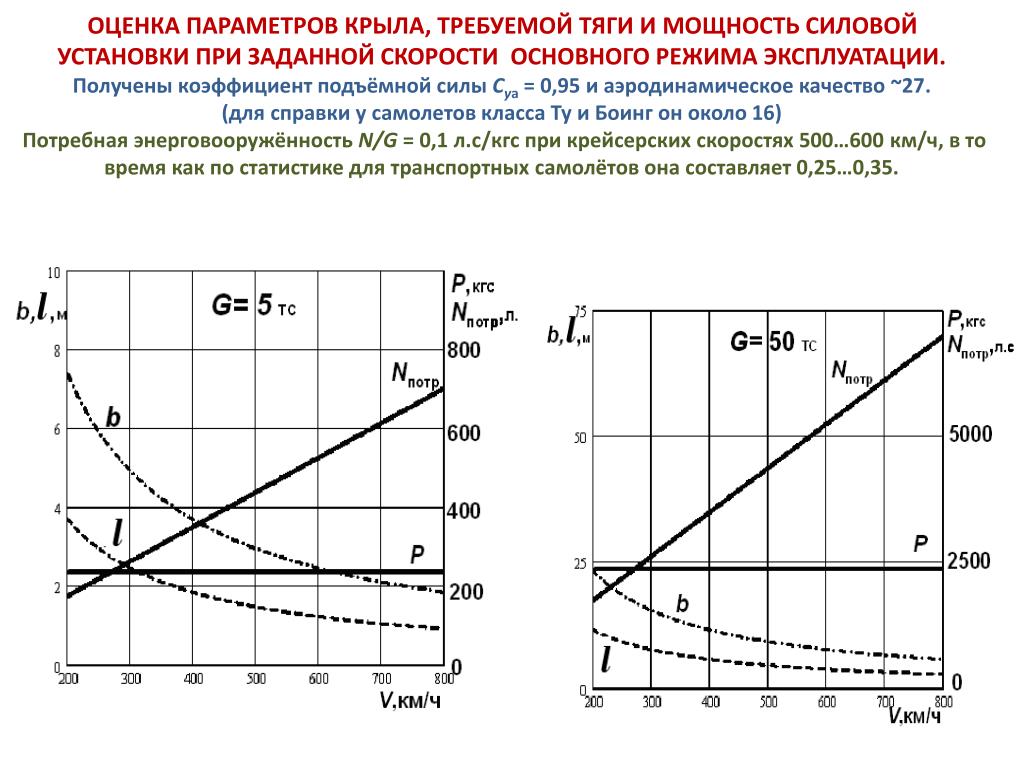 7.2 Отношение: Заголовок, Шаг, Банк
7.2 Отношение: Заголовок, Шаг, Банк 2 Давление и ветер на высоте
2 Давление и ветер на высоте 9 Лидерство и управление ресурсами
9 Лидерство и управление ресурсамиКривые аэродинамического сопротивления — аэродинамические факторы
Когда индуктивное сопротивление и паразитное сопротивление нанесены на график, общее сопротивление самолета отображается в виде «кривой сопротивления». График А на рисунке 1 показывает кривую, основанную на зависимости тяги от сопротивления, которая в основном используется для реактивных самолетов. График B на рисунке 1 основан на зависимости мощности от лобового сопротивления и используется для винтовых самолетов. Этот пост посвящен диаграммам мощности и лобового сопротивления для винтовых самолетов. 9Рисунок 1. Кривые требуемой тяги и мощности Поскольку для поддержания постоянной воздушной скорости мощность должна равняться сопротивлению, кривая может быть либо кривой сопротивления, либо кривой требуемой мощности. Кривая требуемой мощности представляет собой количество мощности, необходимой для преодоления лобового сопротивления, чтобы поддерживать постоянную скорость в горизонтальном полете.
График B на рисунке 1 основан на зависимости мощности от лобового сопротивления и используется для винтовых самолетов. Этот пост посвящен диаграммам мощности и лобового сопротивления для винтовых самолетов. 9Рисунок 1. Кривые требуемой тяги и мощности Поскольку для поддержания постоянной воздушной скорости мощность должна равняться сопротивлению, кривая может быть либо кривой сопротивления, либо кривой требуемой мощности. Кривая требуемой мощности представляет собой количество мощности, необходимой для преодоления лобового сопротивления, чтобы поддерживать постоянную скорость в горизонтальном полете.
Гребные винты, используемые в большинстве поршневых двигателей, достигают максимального КПД гребного винта в диапазоне от 80 до 88 процентов. По мере увеличения воздушной скорости эффективность воздушного винта увеличивается, пока не достигнет своего максимума. Любая воздушная скорость выше этой максимальной точки приводит к снижению эффективности воздушного винта. В двигателе мощностью 160 лошадиных сил только около 80 процентов этой мощности преобразуется в доступную мощность, то есть примерно 128 лошадиных сил. Остальное — потерянная энергия. По этой причине кривые доступной тяги и мощности меняются со скоростью.
Остальное — потерянная энергия. По этой причине кривые доступной тяги и мощности меняются со скоростью.
Области управления
Кривая сопротивления также иллюстрирует две области управления: область нормального управления и область обратного управления. Термин «управляемая область» относится к соотношению между скоростью и мощностью, необходимой для поддержания или изменения этой скорости. «Команда» относится к входным данным, которые пилот должен дать с точки зрения мощности или тяги, чтобы поддерживать новую скорость после достижения.
«Область нормальной команды» возникает там, где необходимо добавить мощность для увеличения скорости. Эта область существует при скоростях выше точки минимального сопротивления в основном в результате паразитного сопротивления. «Область обратного управления» возникает там, где требуется дополнительная мощность для поддержания более низкой воздушной скорости. Эта область существует при скоростях ниже точки минимального сопротивления (L/DMAX на кривой требуемой тяги, рис.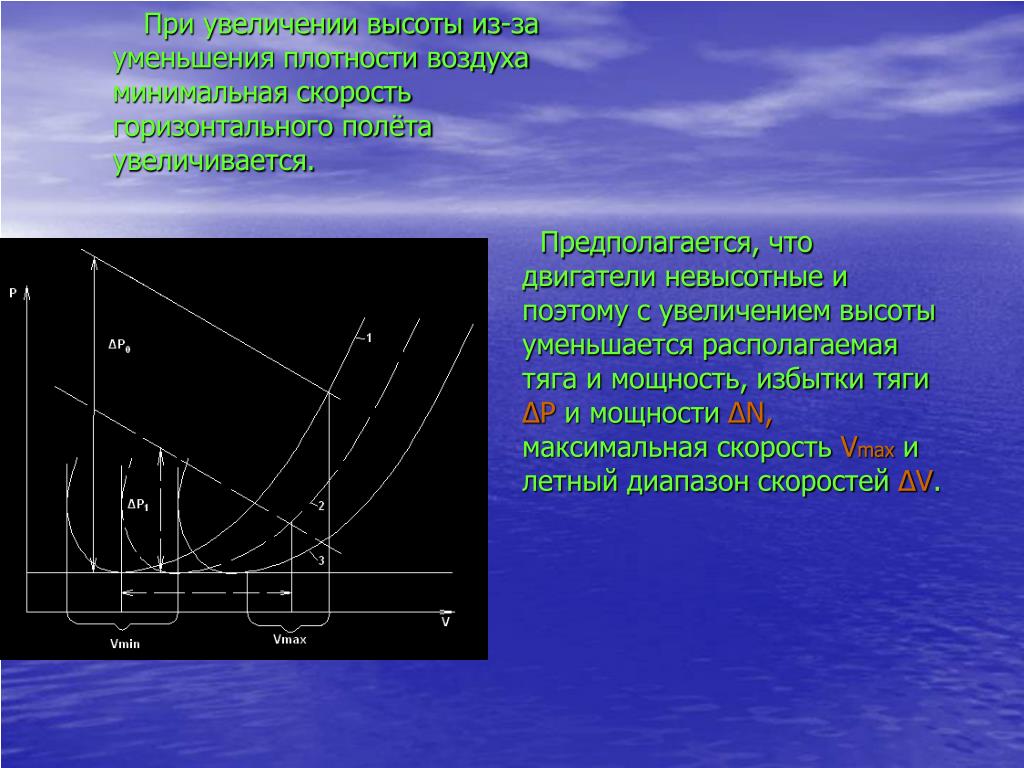 1) и в основном возникает из-за индуктивного сопротивления. На рисунке 2 показано, как одна установка мощности может дать две скорости, точки 1 и 2. Это связано с тем, что в точке 1 наблюдается высокое индуктивное сопротивление и низкое паразитное сопротивление, а в точке 2 — высокое паразитное сопротивление и низкое индуктивное сопротивление.
1) и в основном возникает из-за индуктивного сопротивления. На рисунке 2 показано, как одна установка мощности может дать две скорости, точки 1 и 2. Это связано с тем, что в точке 1 наблюдается высокое индуктивное сопротивление и низкое паразитное сопротивление, а в точке 2 — высокое паразитное сопротивление и низкое индуктивное сопротивление.
Область обратной команды может встречаться на малоскоростных фазах полета при взлете и посадке; однако для большинства самолетов авиации общего назначения эта область очень мала и ниже нормальной скорости захода на посадку. 900:05 Полет в районе штатного расписания характеризуется относительно сильной склонностью самолета к поддержанию балансировочной скорости. Полет в районе обратного управления характеризуется относительно слабой склонностью самолета к поддержанию балансировочной скорости. На самом деле, вполне вероятно, что самолет не проявляет присущей ему тенденции поддерживать балансировочную скорость в этой области.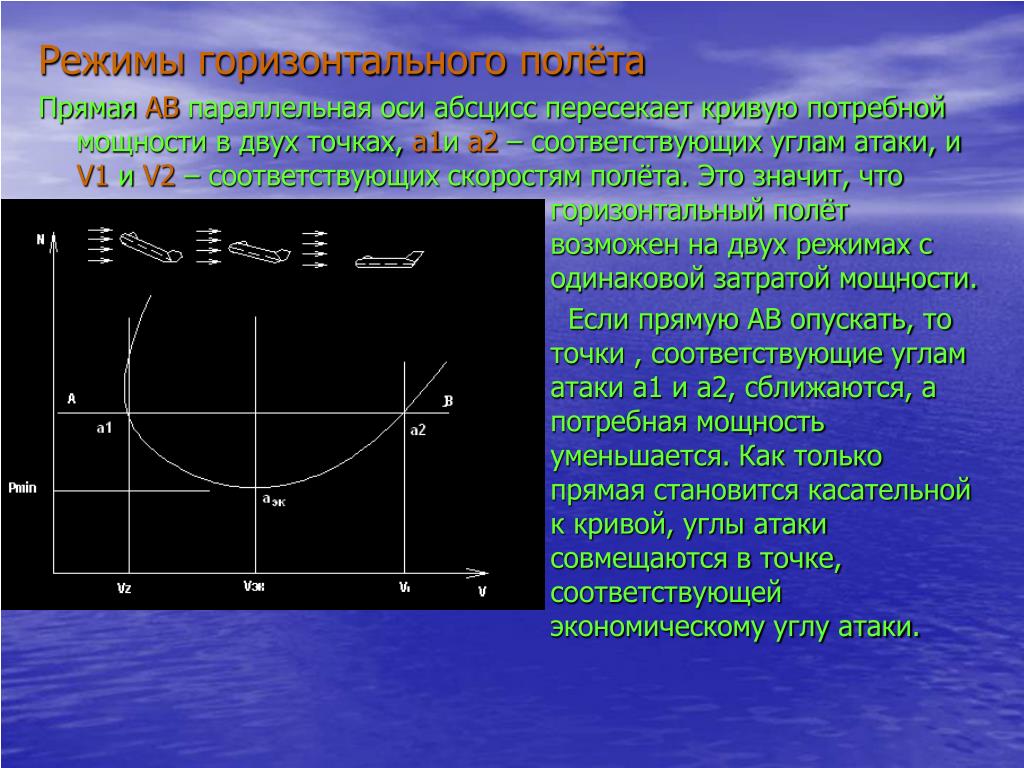 По этой причине пилот должен уделять особое внимание точному управлению воздушной скоростью при работе в фазах малой скорости в области обратного управления. По этой причине пилот должен уделять особое внимание точному управлению воздушной скоростью при работе в фазах малой скорости в области обратного управления.Эксплуатация в области реверсивного управления не означает, что существуют большие трудности управления и опасные условия. Тем не менее, это увеличивает ошибки базовой техники пилотирования, что делает очень важными правильную технику пилотирования и точное управление летательным аппаратом. Стабильность скоростиНормальное управлениеХарактеристики полета в области нормального управления показаны в точке А на кривой на рисунке 3. Если самолет находится в установившемся горизонтальном полете в точке А, подъемная сила равна вес, а доступная мощность устанавливается равной требуемой мощности. Если воздушная скорость увеличивается без изменения настройки мощности, существует дефицит мощности. Самолет имеет естественную тенденцию возвращаться к начальной скорости, чтобы сбалансировать мощность и сопротивление. Если воздушная скорость снижается без изменения настройки мощности, существует избыток мощности. Самолет имеет естественную тенденцию к ускорению, чтобы восстановить баланс между мощностью и сопротивлением. Поддержание самолета в правильной дифферентности усиливает эту естественную тенденцию. Статическая продольная устойчивость самолета стремится вернуть самолет в исходное состояние балансировки. 9Рис. 3. Область устойчивости скорости [Рисунок 3] Если бы скорость была немного увеличена или уменьшена, самолет, как правило, оставался бы на этой скорости. Это связано с тем, что кривая относительно плоская, и небольшое изменение скорости не приводит к значительному увеличению или уменьшению мощности. Он имеет характеристику нейтральной устойчивости (т. е. самолет стремится оставаться на новой скорости). Если воздушная скорость снижается без изменения настройки мощности, существует избыток мощности. Самолет имеет естественную тенденцию к ускорению, чтобы восстановить баланс между мощностью и сопротивлением. Поддержание самолета в правильной дифферентности усиливает эту естественную тенденцию. Статическая продольная устойчивость самолета стремится вернуть самолет в исходное состояние балансировки. 9Рис. 3. Область устойчивости скорости [Рисунок 3] Если бы скорость была немного увеличена или уменьшена, самолет, как правило, оставался бы на этой скорости. Это связано с тем, что кривая относительно плоская, и небольшое изменение скорости не приводит к значительному увеличению или уменьшению мощности. Он имеет характеристику нейтральной устойчивости (т. е. самолет стремится оставаться на новой скорости). Обратное управление Характеристики полета в области обратного управления показаны в точке B на кривой на рис. 2. Если самолет находится в установившемся горизонтальном полете в точке B, подъемная сила равна массе, а доступная мощность устанавливается равной требуемой мощности. 2019 © Все права защищены. Карта сайта |