
Росавиация проверит «Победу» из-за траектории полета в поддержку Дзюбы :: Бизнес :: РБК
Авиакомпания «Победа» нацелилась на 30% российского рынкаЭкипаж «Победы» 11 ноября запросил разрешение на выполнение виражей из-за «необходимости проверки радионавигационных средств», следует из донесения Росавиации. Согласно документу, маневры не были предусмотрены планом полета и разрешением на использование воздушного пространства. Получил ли капитан самолета согласие диспетчеров на такие маневры, в материалах ведомства не говорится. Но в итоге самолет прибыл в екатеринбургский аэропорт Кольцово с 20-минутной задержкой, следует из данных сервиса FlightRadar24.
Читайте на РБК Pro
«У проверки [Росавиации] есть две составляющие. Первая — безопасность полетов. Проверка позволит выяснить, получил ли экипаж подтверждение на выполнение маневров, корректно ли он трактовал это разрешение, создавали ли эти маневры проблемы с точки зрения безопасности полетов, привели ли они к опасным сближениям и т.д.», — замечает исполнительный директор агентства «Авиапорт» Олег Пантелеев. Второй аспект — этический, проведение проверки, вне зависимости от ее результатов, должно показать, что такие действия экипажа выходят за рамки этичного поведения, добавляет он. По словам Пантелеева, если разрешение на выполнение маневров не было получено, то ответственным лицам может грозить дисциплинарная ответственность.
Но и Пантелеев, и главный редактор портала Avia.ru Роман Гусаров не исключают, что акция пилотов может оказаться пиаром. «У меня большое подозрение, что это очередная вирусная реклама авиакомпании. Я полагаю, что ничего подобного не происходило.
Как объясняет Гусаров, если факт акции подтвердится, то пилоты могут лишиться сертификатов и могут быть уволены с «волчьим билетом». «Такие маневры в воздухе гражданской авиации очень опасны с учетом того, что плотность движения высокая, магистрали достаточно узкие и здесь так маневрировать, кто куда хочет, просто не допускается. Тем более нарисовать в поддержку и таким образом признаться, что это сделали, это значит самим признаться в таком хулиганстве.
«Победа» и Росавиация
«Победа» неоднократно конфликтовала с Росавиацией. В конце 2018 года глава авиакомпании Андрей Калмыков заявил в интервью РБК о полном развале системы подготовки пилотов в России. «Государство потратило огромные деньги на их подготовку, чтобы они летали на кукурузниках. Мы готовы теперь вкладывать огромные деньги, чтобы переучить их с «кукурузников» на магистральный самолет, но не можем этого сделать, потому что на последнем этапе что-то сбоит, дипломы не выдают, — недоумевал топ-менеджер. — Получается, что даже на «кукурузник» у нас подготовить не могут». Тогда в ведомстве с этим не согласились: «Никаких кукурузников у нас нет, в учебных заведениях гражданской авиации используются современнейшие воздушные средства — как однодвигательные, так и многодвигательные, со стеклянной кабиной».
«Победа» требовала через Арбитражный суд Москвы признать незаконным отказ регулятора рассматривать ее предложение по взлету и посадке в аэропорту Геленджика со стороны гор, чтобы избежать задержек из-за сильного ветра. Но суд отклонил ее иск. Годом ранее ведомство посчитало «крайне неуклюжими и некрасивыми» объяснения лоукостером причин отказа в перевозке женщины с ребенком, больным детским церебральным параличом (ДЦП). После этого случая «Победа» сообщила, что уволит руководителя группы наземного обеспечения за некомпетентность в организации рабочего процесса и подготовит особое руководство для обслуживания пассажиров с ограниченными физическими возможностями.
Эксперт раскритиковал действия пилота Ryanair, экстренно севшего в Минске
На борту самолета Ryanair, выполнявшего рейс из Афин в Вильнюс и экстренно выполнившего посадку в аэропорту Минска 23 мая, могли находиться сотрудники белорусского КГБ, считает глава авиакомпании. Эксперт рассказал «Газете.Ru», мог ли пилот Ryanair проигнорировать требования минских диспетчеров и к каким последствиям это могло привести.
Эксперт рассказал «Газете.Ru», мог ли пилот Ryanair проигнорировать требования минских диспетчеров и к каким последствиям это могло привести.
В ситуации с перенаправленным самолетом крупнейшей бюджетной авиакомпании в Европе Ryanair пока больше вопросов, чем ответов. В частности, непонятно, кто именно сообщил о минировании пассажирского лайнера и на основании чего это было сделано.
В СМИ распространяется фрагмент переговоров диспетчера и пилотов самолета, из которых следует, что «служба безопасности аэропорта [Национальный аэропорт «Минск»] сообщила о получении электронного письма». Официально запись переговоров пока что не опубликована.
При этом неясным остается и почему сигнал о минировании поступил буквально за несколько минут до прибытия рейса компании Ryanair в пункт назначения — аэропорт литовской столицы.
На борту самолета ирландской авиакомпании, который совершил экстренную посадку в Минске, находились больше 100 пассажиров, среди них — основатель признанного в Белоруссии экстремистским Telegram-канала Nexta и главред Telegram-канала «Беларусь головного мозга» Роман Протасевич.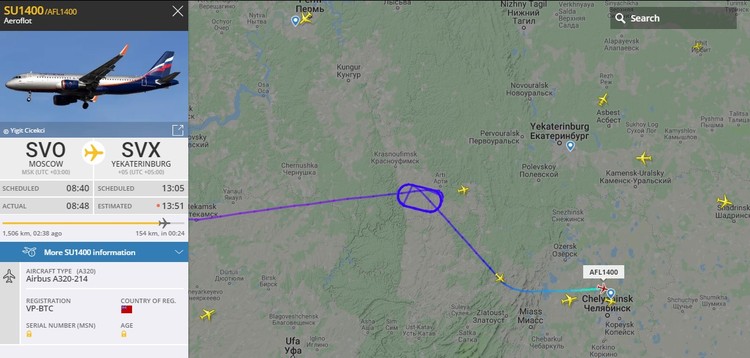 До этого он находился в розыске в Белоруссии, после посадки самолета его задержали.
До этого он находился в розыске в Белоруссии, после посадки самолета его задержали.
О «минировании» самолета было доложено президенту Белоруссии Александру Лукашенко, который дал команду принять рейсовый гражданский самолет в аэропорту Минска. В официальных сообщениях говорится, что в «этой ситуации самое главное — безопасность и жизни людей».
Для сопровождения пассажирского самолета в небо был поднят истребитель МиГ-29 ВВС Белоруссии.
К слову, представители авиакомпании сообщили, что пилоты получили сигнал о взрывном устройстве на борту от диспетчеров из Минска. «Самолет благополучно приземлился, пассажиров высадили, а местные службы проверили самолет. Ничего не было обнаружено», — заявили в Ryaniar. Через пять часов после приземления самолету разрешили покинуть аэропорт Минска, а СК Белоруссии заявил уголовное дело по факту заведомо ложного сообщения об опасности.
Однако остается много вопросов. В частности, зачем нужно было разворачивать самолет в Минск, а не посадить его, предположим, на ближайшем аэродроме 1-го класса ВВС Белоруссии в Лиде, где базируется 116-я гвардейская штурмовая авиационная Радомская Краснознаменная база.
«В этой ситуации более чем удивительно поведение командира воздушного судна Ryanair»,
— говорит в беседе с «Газетой.Ru» экс-начальник Главного штаба Войск противовоздушной обороны заслуженный военный летчик СССР генерал-полковник авиации Игорь Мальцев.
Военачальник напомнил, что это был рейсовый самолет, полет совершался по заявке, в строго отведенное для этого время и на установленном эшелоне и курсе.
Пилот Ryanair как командир воздушного судна мог запросто проигнорировать все требования как летчика МиГ-29 ВВС Белоруссии, так и белорусских наземных служб, считает эксперт.
Мальцев уверен, что если самолет гражданский, летит по расписанию, нарушителем государственной границы и режима полетов не является, до посадки на аэродроме назначения остаются считанные минуты, то с предполагаемой взрывчаткой могли разобраться в пункте назначения, то есть в Вильнюсе, а в Минск, совершая огромный крюк, для этого лететь никакой необходимости не было.![]()
«И что бы в этом случае сделал пилот белорусского МиГ-29, если командир самолета Ryanair отказался выполнять его требования? — задается вопросом генерал-полковник Игорь Мальцев. — Да ровным счетом ничего. Это пассажирский самолет, не RC-135 и не Р-8 «Посейдон», он не нарушал воздушное пространство Белоруссии, летел по установленному международному коридору. К тому же, по гражданским лайнерам и транспортным воздушным судам огонь открывать истребителям-перехватчикам категорически запрещается. И любой пилот об этом знает. Если он уничтожит гражданский самолет, то сразу перейдет в разряд международных преступников, и ему грозят, мягко говоря, очень большие неприятности. И даже глава государства в этом случае может его не прикрыть».
«Таким образом, поведение командира воздушного судна компании Ryanair в этой ситуации кажется мне более чем странным. Поэтому невольно возникает впечатление — не поработали ли с этим пилотом спецслужбы еще до вылета? Ничем другим его поведение объяснить нельзя. Ну, подошел к нему истребитель, а что дальше? Само приближение истребителя к рейсовому самолету ничем этому рейсовому самолету не грозит. Что он его, таранить что ли собирался? При этом командир воздушного судна Ryanair находился на связи с аэродромом вылета, прилета, пунктами единой системы управления воздушным движением. Словом, темная история», — считает заслуженный военный летчик Игорь Мальцев.
Ну, подошел к нему истребитель, а что дальше? Само приближение истребителя к рейсовому самолету ничем этому рейсовому самолету не грозит. Что он его, таранить что ли собирался? При этом командир воздушного судна Ryanair находился на связи с аэродромом вылета, прилета, пунктами единой системы управления воздушным движением. Словом, темная история», — считает заслуженный военный летчик Игорь Мальцев.
Кроме того, продолжает эксперт, если предположить, что истребитель выполнял атаку, то пилот Ryanair, в принципе, не мог видеть ее, поскольку атака осуществляется с задней полусферы.
В то же время, на самолете во время перелета из Афин в Вильнюс могли находиться сотрудники КГБ Белоруссии, заявил в эфире радио Newstalk глава Ryanair Майкл О’Лири.
«Похоже, власти намеревались снять с рейса журналиста и его попутчика… Мы полагаем, что в аэропорту также сошли с рейса некоторые агенты КГБ», — заявил О’Лири, добавив, что считает инцидент с самолетом «поддерживаемым государством угоном».
Как бы то ни было, практика принудительной посадки самолетов не в пункте назначения — не такой уж редкий случай в международных отношениях. Так, в частности, в 2012 году истребители ВВС Турции были подняты, чтобы принудить сирийский пассажирский самолет сесть в Анкаре. Тогда лайнер, выполнявший рейс из Москвы в Дамаск, заподозрили в перевозке военного груза.
В 2013 году власти Европейского союза принудили к посадке в Вене самолет президента Боливии Эво Моралеса, следовавший из Москвы. Самолет в аэропорту австрийской столицы обыскали, но экс-сотрудника ЦРУ Эдварда Сноудена (а поводом для посадки президентского лайнера была информация, что Сноуден, возможно, находится в этом самолете) на борту так и не обнаружили.
В 2016 году самолет авиакомпании «Белавиа» вылетел из киевского аэропорта Жуляны. За 50 км до входа в воздушное пространство Белоруссии пилоты получили указание от диспетчера немедленно вернуться на аэродром вылета. В случае отказа в воздух собирались поднять истребители украинских ВВС. Все это предпринималось для того, чтобы снять с борта некоего гражданина Армении.
Все это предпринималось для того, чтобы снять с борта некоего гражданина Армении.
Что касается нынешнего инцидента, правоохранительные органы Литвы возбудили уголовное дело после посадки в Минске лайнера авиакомпании Ryanair, летевшего из Афин в Вильнюс. Об этом сообщил заместитель генерального комиссара полиции Арунас Арлаускас. По его словам, члены экипажа самолета, приземлившегося поздно вечером в пункте назначения, будут допрошены уже сегодня.
Минобороны Белоруссии: МиГ-29 действительно сопровождал самолет Ryanair, но уже после того, как тот взял курс на Минск — Власть — Новости Санкт-Петербурга
Министерство обороны Белоруссии подтвердило факт сопровождения истребителем МиГ-29 самолета авиакомпании Ryanair — после того, как поступило сообщение о его минировании и направлении в Минск вместо Вильнюса. На борту находился один из главных оппозиционеров Белоруссии, основатель NEXTA Роман Протасевич, которого после посадки задержали белорусские правоохранители.
«Получив информацию о наличии в воздушном пространстве нашей страны гражданского воздушного судна с возможным минированием, решением оперативного дежурного Центрального командного пункта дежурные силы по противовоздушной обороне были приведены в готовность № 1.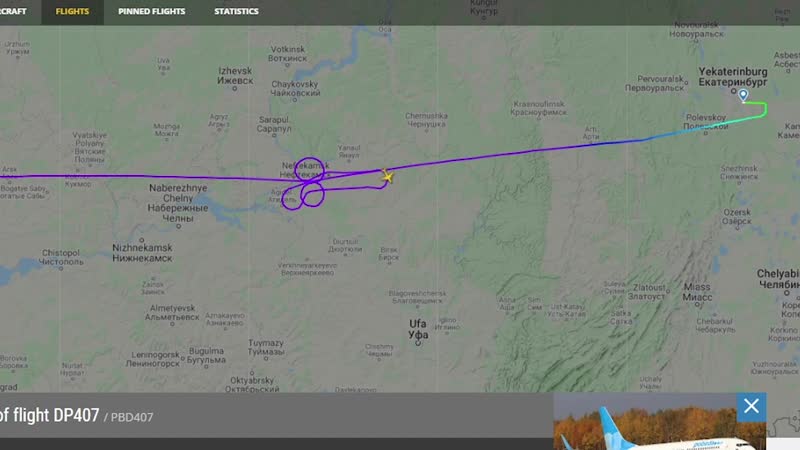 Это делается для того, чтобы оценить обстановку и в дальнейшем принять правильное решение, — заявил в специальном сообщении в Telegram начальник Главного штаба Белоруссии — первый заместитель командующего ВВС и войсками ПВО генерал-майор Андрей Гурцевич. — После того, как командир данного гражданского судна принял решение осуществить посадку на запасном аэродроме (Минск-2) и развернул самолет в направлении Минска, было принято решение и поднят в воздух дежурный экипаж МиГ-29 с аэродрома Барановичи».
Это делается для того, чтобы оценить обстановку и в дальнейшем принять правильное решение, — заявил в специальном сообщении в Telegram начальник Главного штаба Белоруссии — первый заместитель командующего ВВС и войсками ПВО генерал-майор Андрей Гурцевич. — После того, как командир данного гражданского судна принял решение осуществить посадку на запасном аэродроме (Минск-2) и развернул самолет в направлении Минска, было принято решение и поднят в воздух дежурный экипаж МиГ-29 с аэродрома Барановичи».
По словам белорусского генерала, дежурный экипаж получил задачу осуществлять контроль и в случае необходимости оказать помощь гражданскому судну осуществить безопасную посадку на аэродром Минск-2. В чем могла заключаться такая помощь гражданскому самолету с возможной миной на борту со стороны боевого истребителя, представители Минобороны Белоруссии не стали пояснять.
Ранее о том, что поднять в воздух истребитель на перехват рейса Ryanair приказал лично президент Белоруссии Александр Лукашенко, сообщали российские СМИ со ссылкой на анонимный телеграм-канал.
Самолет авиакомпании Ryanair, следовавший по маршруту Афины — Вильнюс, экстренно сел в аэропорту Минска днем в воскресенье, 23 мая. Этому предшествовало сообщение о мине, заложенной на борту самолета, которое после проверки не подтвердилось. Судя по записи траектории полета рейса FR4978, он уже почти достиг границы с Литвой, но развернулся в сторону Минска, не долетев до Вильнюса всего около 70 км. До столицы Белоруссии лететь было вдвое дальше. После посадки правоохранительные органы задержали Романа Протасевича, основателя интернет-СМИ NEXTA, принимавшего активное участие в освещении и координации протестов в Белоруссии в 2020 году.
Как передаёт РИА Новости, на самолете Ryanair летели 123 пассажира, их всех отправили на досмотр. После проверки службой авиабезопасности их багажа командир примет решение о вылете.
По данным RT, в МИД Литвы вызван временный поверенный в делах Белоруссии. У него потребовали немедленного освобождения всех пассажиров и членов экипажа Ryanair. Кроме того, как пишут СМИ, президент Литвы призвал ЕС и НАТО отреагировать на действия белорусских властей.
Кроме того, как пишут СМИ, президент Литвы призвал ЕС и НАТО отреагировать на действия белорусских властей.
Никаких официальных объяснений произошедшего и слухов о возможном силовом принуждении пилотов к посадке в пресс-службе Ryanair не дают.
Лукашенко назвал причину крушения военного самолета Як-130 в Барановичах — Происшествия
МИНСК, 20 мая. /ТАСС/. Президент Белоруссии Александр Лукашенко сообщил, что причиной крушения военного самолета в Барановичах (Брестская область) 18 мая стал отказ всех уровней системы управления.
«У Як-130 отказали все уровни системы управления. Их четыре и пятая — резервная. Они отказали мгновенно, в течение одной минуты. Каждую секунду один, второй, третий, четвертый уровни управления отказывали. Остался резервный уровень, который работал с жуткими перебоями, но который дал возможность отвести самолет», — заявил Лукашенко в четверг на совещании, фрагмент его выступления разместил Telegram-канал «Пул первого».
По словам президента, полученные после расшифровки черных ящиков первоначальные данные позволили сделать вывод, что пилоты смогли отвести самолет «от еще большей беды и увести его на единственный свободный участок земли между жилыми домами».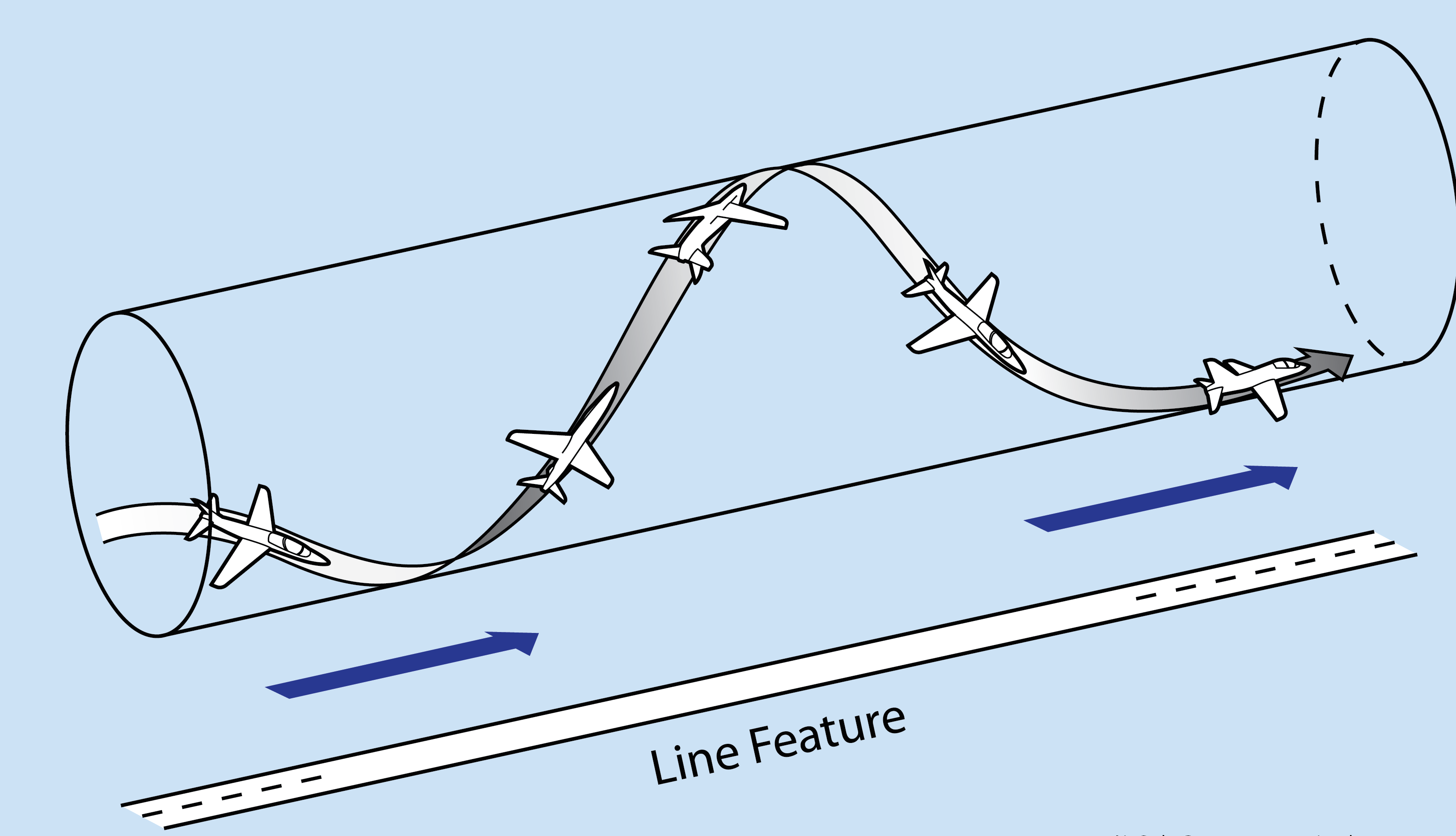 «Пилоты не катапультировались. Как показывают ящики, они боролись до конца. Просто одного из них выбросило катапультой во время удара о землю. Они боролись до конца, понимая, что у них и времени не было. И понимали, что беда будет, если самолет упадет на жилые кварталы. Погибли два просто героических человека», — сказал Лукашенко.
«Пилоты не катапультировались. Как показывают ящики, они боролись до конца. Просто одного из них выбросило катапультой во время удара о землю. Они боролись до конца, понимая, что у них и времени не было. И понимали, что беда будет, если самолет упадет на жилые кварталы. Погибли два просто героических человека», — сказал Лукашенко.
Президент поблагодарил белорусов, которые в подавляющем большинстве высказали соболезнования семьям. «Я только что еще раз попросил госсекретаря [Совета безопасности Александра Вольфовича], чтобы связались с семьями, и особенно нашему парню, майору, который имеет трое детей, чтобы оказали всяческую поддержку, — отметил Лукашенко. — Поэтому, [председатель Совета Республики] Наталья Ивановна [Кочанова], посмотрите за этим вопросом, чтобы семьи не оказались обиженными в этой ситуации. Поддерживать семьи, особенно детишек, нужно».
Глава государства также заметил, что есть и «другие люди, их иначе как мерзавцами не назовешь», они выкладывали в соцсетях неподобающие комментарии касаемо катастрофы, и поручил председателю КГБ Белоруссии установить этих людей.
Данные бортовых самописцев
Командующий ВВС и войсками ПВО ВС Белоруссии Игорь Голуб, ссылаясь на результаты расшифровки данных бортовых самописцев Як-130, подтвердил, что крушение Як-130 в Белоруссии произошло из-за отказа системы управления.
«По предварительным, первым результатам расшифровки этих черных ящиков уже достоверно могу сказать: первое — аварийная ситуация произошла в горизонтальном полете самолета Як-130 над аэродромом Барановичи. Экипаж после возникновения аварийной ситуации доложил руководителю полетов об отказе системы управления, что подтверждается материалами объективного контроля черных ящиков», — отметил командующий, слова которого приводит пресс-служба Минобороны Белоруссии.
Голуб пояснил, что в данной ситуации, согласно требованию Руководства по летной эксплуатации самолета Як-130, экипаж обязан был покинуть самолет — катапультироваться. «Руководитель полетов не менее 10 раз в эфир подал команду «Катапультируйся! Катапультируйся! Прыгай!». В это время самолет перешел в неуправляемое хаотичное движение, и его траектория начала уклоняться влево, т. е. в сторону города», — проинформировал командующий ВВС и войсками ПВО. По его словам, использование экипажем резервной системы управления позволило стабилизировать «только направление полета, и экипажу удавалось изменять направление полета, но не высоту — высота продолжала интенсивно падать». «Как показывают средства объективного контроля, от момента создания аварийной ситуации до падения самолета в точку прошло чуть более минуты», — сказал Голуб.
В это время самолет перешел в неуправляемое хаотичное движение, и его траектория начала уклоняться влево, т. е. в сторону города», — проинформировал командующий ВВС и войсками ПВО. По его словам, использование экипажем резервной системы управления позволило стабилизировать «только направление полета, и экипажу удавалось изменять направление полета, но не высоту — высота продолжала интенсивно падать». «Как показывают средства объективного контроля, от момента создания аварийной ситуации до падения самолета в точку прошло чуть более минуты», — сказал Голуб.
Он сообщил, что в этих условиях на высоте около пятидесяти метров экипажу удалось «выровнять, стабилизировать направление полета неимоверными усилиями и направить самолет именно в ту единственную точку, которая была вне жилых построек». «Уже перед гарантированным падением в эту точку экипажу не хватило высоты для принятия решения и безопасно покинуть самолет», — отметил командующий.
О катастрофе
Самолет Як-130 Вооруженных сил Белоруссии потерпел крушение под Барановичами в среду, оба пилота погибли.
По данным оборонного ведомства, при выполнении учебно-тренировочного полета экипаж обнаружил техническую неисправность, пилоты стремились увести самолет от населенного пункта. Главным следственным управлением Следственного комитета возбуждено уголовное дело по ч. 2 ст. 465 («Нарушение правил полетов или подготовки к ним, повлекшее по неосторожности смерть двух лиц»).
Программные продукты
Программные продукты
ЭСКОРТ ТП
Экспертная Система Комплексной Оценки Реальных Тенденций Техники Пилотирования.
Расшифрованная полетная информация за всё время эксплуатации ВС сохраняется в специальной базе данных. Помимо этого программа экспресс-анализа автоматически строит траекторию полета самолёта по всему маршруту, рассчитывает длину разбега и пробега, градиент набора высоты и вычисляет еще более 60 контрольных точек полёта, причём, в базе однозначно фиксируется, кто выполнял полёт КВС или второй пилот.
Апробирована на двух типах ВС DHC 8-200, и Boeing 737-200. По результатам опубликовано 9 статей в центральной отраслевой прессе.
По результатам опубликовано 9 статей в центральной отраслевой прессе.
Пронормировав каждую контрольную точку по трём уровням отклонений, и вычислив по определённым алгоритмам, итоговый балл за полёт в конечном итоге представляется реальным дать количественную оценку качества техники пилотирования, причём не пресловутую «удовлетворительно», «хорошо», «отлично», а некоим образом абстрагированную цифру.
Используя математический аппарат теории вероятности, статистического и матанализа производится анализ как общих тенденций по лётному подразделению, так и техники пилотирования, у конкретного пилота.
Крайне важным является то, что система работает как на выявление нарушений допущенных экипажем в полёте, так и на предупреждение этих нарушений. Причём приоритет отводится второму.
Система позволяет перейти от ретроактивного к проактивному методу управления рисками в Системах Управления Безопасностью Полетов (СУБП).
Программа экспресс-анализа полётной информации для самолётов типа DHC 8-200
Работа над программой начата в 2006 году и продолжается до сих пор. Программа выполняет экспресс-анализ полётной информации самолёта DHC 8-200, записанной самописцами SSFDR или UFDR.
Программа выполняет экспресс-анализ полётной информации самолёта DHC 8-200, записанной самописцами SSFDR или UFDR.
По результатам проведения испытаний в Государственном .Центре Безопасности полётов на Воздушном Транспорте программа экспресс-анализа полётной информации для самолёта DHC 8-200, допущена к эксплуатации (указание МТ РФ, РОСТРАННАДЗОР №5.6.-578 ГА от 06.08.2005) и внесена в «Реестр специального программного обеспечения систем обработки полетной информации, допущенного к использованию в авиапредприятиях Российской Федерации» № 1005 www.flysafety.ru
Программа осуществляет расшифровку и анализ полётной информации по специальным алгоритмам в шестидесяти семи сообщениях (в поиске ситуаций выхода параметров за пределы лётных ограничений).
Реализован принцип визуализации подтверждения сообщений, программа автоматически строит траекторию полета самолёта по всему маршруту, рассчитывает длину разбега и пробега , градиент набора высоты и еще более 93 контрольных точек полёта, выполняется эта работа за один технологический цикл с программой экспресс-анализа, и заносится в базу данных которая в с в свою очередь служит информационной платформой для программы «ЭСКОРТ ТП» .
После расшифровки полётной информации в подразделении эксплуатации бортовых самописцев, результаты мгновенно, по корпоративной компьютерной сети, становятся доступны для КЛС лётного подразделения. При анализе полетной информации командно-инструкторскому составу доступны любые графические материалы полёта.
Расшифрованная полетная информация за всё время эксплуатации ВС сохраняется в специальной базе данных позволяющей проводить системный, ретроспективный или персонифицированный анализ .
Руководитель проекта и постановщик задачи — Бутырин О.А., зам нач ОТП по ПО
Программист — Клещенко С.В., ведущий инженер-программист
Консультант — Куликов А,А. пилот-инструктор DHC 8-300
Справки по тел.(4242) 788-177
Программа экспресс-анализа полётной информации для самолётов типа DHC 8-300
Работа над программой начата в 2008 году и продолжается до сих пор. Программа выполняет экспресс-анализ полётной информации самолёта DHC 8-200, записанной самописцами SSFDR или UFDR .
По результатам проведения испытаний в Государственном .Центре Безопасности полётов на Воздушном Транспорте программа экспресс-анализа полётной информации для самолёта DHC 8-300, допущена к эксплуатации (указание МТ РФ, РОСАВИАЦИИ №21.6/1-131 от 11.06.2009) и внесена в «Реестр специального программного обеспечения систем обработки полетной информации, допущенного к использованию в авиапредприятиях Российской Федерации» № 1005 www.flysafety.ru
Программа осуществляет расшифровку и анализ полётной информации по специальным алгоритмам в девяносто сообщениях (в поиске ситуаций выхода параметров за пределы лётных ограничений).
Реализован принцип визуализации подтверждения сообщений, программа автоматически строит траекторию полета самолёта по всему маршруту, рассчитывает длину разбега и пробега , градиент набора высоты и еще более 93 контрольных точек полёта, выполняется эта работа за один технологический цикл с программой экспресс-анализа, и заносится в базу данных которая в с в свою очередь служит информационной платформой для программы «ЭСКОРТ ТП» .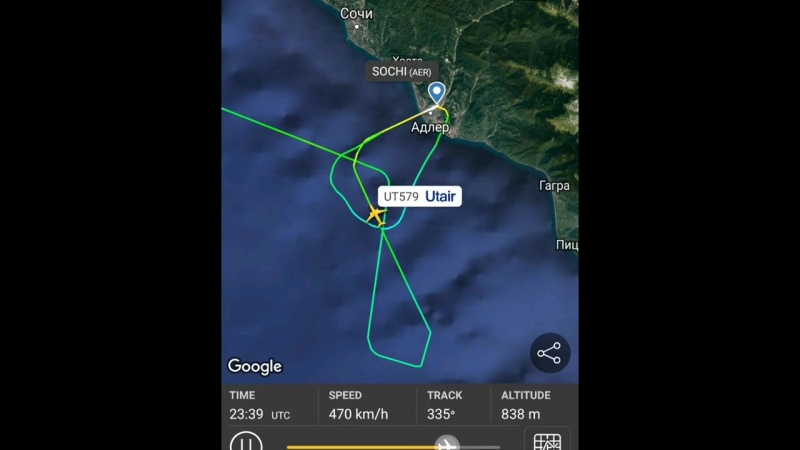
После расшифровки полётной информации в подразделении эксплуатации бортовых самописцев, результаты мгновенно, по корпоративной компьютерной сети, становятся доступны для КЛС лётного подразделения. При анализе полетной информации командно-инструкторскому составу доступны любые графические материалы полёта.
Расшифрованная полетная информация за всё время эксплуатации ВС сохраняется в специальной базе данных позволяющей проводить системный, ретроспективный или персонифицированный анализ .
Руководитель проекта и постановщик задачи — Бутырин О.А., зам нач ОТП по ПО
Программист — Клещенко С.В., ведущий инженер-программист
Консультант — Куликов А,А. пилот-инструктор DHC 8-300
Справки по тел.(4242) 788-177
Программа экспресс-анализа полётной информации для самолётов типа Boeing 737-500
Работа над программой начата в 2000 году и продолжается до сих пор. Программа выполняет экспресс-анализ полётной информации самолёта Boeing737-500, записанной самописцами SSFDR или UFDR .
По результатам испытаний в Гос. Центре Безопасности полётов на ВТ, распоряжением ГС ГА№24.10-266ГА от 18.09.2002 программа допущена к использованию в авиапредприятиях Российской Федерации, и внесена в реестр специального программного обеспечения за №140.
Программа осуществляет расшифровку и анализ полётной информации по специальным алгоритмам в сорока трёх сообщениях (в поиске ситуаций выхода параметров за пределы лётных ограничений).
Реализован принцип визуализации подтверждения сообщений, программа автоматически строит траекторию полета самолёта по всему маршруту, рассчитывает длину разбега и пробега , градиент набора высоты и еще 63 контрольные точки полёта, выполняется эта работа за один технологический цикл с программой экспресс-анализа, и заносится в базу данных которая в с в свою очередь служит информационной платформой для программы «ЭСКОРТ ТП» .
После расшифровки полётной информации в подразделении эксплуатации бортовых самописцев, результаты мгновенно, по корпоративной компьютерной сети, становятся доступны для КЛС лётного подразделения. При анализе полетной информации командно-инструкторскому составу доступны любые графические материалы полёта.
Расшифрованная полетная информация за всё время эксплуатации ВС сохраняется в специальной базе данных позволяющей проводить системный, ретроспективный или персонифицированный анализ.
Руководитель проекта и постановщик задачи — Бутырин О.А., зам нач. ОТП по ПО
Программист — Клещенко С.В., ведущий инженер-программист
Справки по тел.(4242) 788-177
Аттракцион полет в невесомости на самолете ИЛ-76 в Москве по выгодным ценам!
Космические полеты — тайное, непонятное для обычных людей, но желаемое и интересное событие, которое всегда привлекает массу внимания. Для обычных людей полеты в космос невозможны, ведь для этого требуется многолетняя подготовка и необходимое физическое состояние. Однако есть возможность испытать на себе, каково побывать в космосе благодаря такому явлению, как аттракцион невесомость.
Состояние невесомости — это уникальное, удивительное ощущение парения в воздухе, отсутствие чувства собственного веса. В обычной жизни возможности испытать на себе невесомость нет, однако при покупке подарочного сертификата на посещение аттракциона невесомости вы сможете пережить практически те же ощущения, что и космонавты.
Благодаря тому, что в земных условиях была смоделирована ситуация, при которой создается невесомость, у каждого из нас есть шанс глубже понять загадки космоса. Воплотить свою мечту вы можете, совершив полет на самолете ИЛ-76 МДК, который специализируется на подготовке космонавтов к пуску.
На полет в невесомости цена становится совершенно не важной, если у вас возникает шанс исполнить мечту детства. Это большая порция адреналина, сумасшедшие веселые кульбиты, ощущение настоящей свободы и отсутствие любых ограничений, привычных для людей.
Все полеты на невесомость производятся по особой траектории парабола Кеплера. Вы будете принимать участие в одном из таких полетов под руководством опытных профессиональных пилотов. Один сеанс невесомости продолжается около 28 секунд, но за это время вы можете испытать всю гамму чувств от страха до детского восторга. Как правило, один полет занимает примерно 1.5 часа и включает в себя 15 режимов невесомости. За один полет вы сможете ощутить невесомость в течение 450 секунд.
Ощущение радости и счастья, невероятной легкости и естественности, которое получает человек в состоянии невесомости, запомнится на всю жизнь. Презентовав возможность несколько минут жизни провести в условиях симуляции космоса, вы подарите бесценный шанс почувствовать себя космонавтом и окунуться в космическую жизнь.
Безусловно, вам будет более весело, если невесомость вы испытаете в компании близких друзей или родственников: вы затем сможете долго обсуждать все особенности путешествия, а также сделаете прекрасные, веселые снимки, которые будут радовать вас всю жизнь и напоминать о самом необычном дне.
TCAS | АО «БАНС» | Москва
БОРТОВАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ
ВОЗДУШНЫХ СУДОВ (TCAS)
Бортовая система предупреждения столкновений воздушных судов в воздухе (БСПС-2015) является средством, обеспечивающим своевременное обнаружение конфликтующих ВС (воздушное судно), классификацию степени их опасности и выработку, в случае необходимости, команды на выполнение вертикального маневра.
Описание
Разработанная АО «БАНС» Бортовая система предупреждения столкновений воздушных судов в воздухе БСПС-2015 предназначена для установки на самолеты семейства Ил-96. Отечественная разработка БСПС-2015 позволяет также заместить аналогичные изделия на воздушных судах типа Ту-204 и Ту-214, МС-21, Сухой Суперджет 100, а также, при необходимости, на самолетах типа Ил-76, Ил-78, Ан-22, Ан-24, Ан-26, Ан-30, Ан-32, Ан-72, Ан-148.
В процессе работы БСПС-2015 осуществляет непрерывное наблюдение за воздушным пространством вокруг собственного ВС. БСПС-2015 выполняет активные запросы и принимает ответы на эти запросы от ответчиков других ВС, находящихся в непосредственной близости. БСПС-2015 распознает ответы от ВС, оснащенных ответчиками режимов RBS (А/С), режима S, и определяет дальность до этих самолетов, курсовой угол и относительную высоту, если она передается в ответных сообщениях. Используя эту информацию, БСПС-2015 прогнозирует траектории полетов обнаруженных ВС.
БСПС-2015 формирует вокруг самолета, на котором она установлена, защищенный объем воздушного пространства, именуемый областью наблюдения. БСПС-2015 обеспечивает защиту этой зоны от вторжения в нее других ВС. Если ожидается, что траектория полета конфликтующего самолета пройдет через эту зону, БСПС-2015 информирует об этом экипаж средствами визуального и речевого оповещения.
Дополнительно БСПС-2015 формирует два объема воздушного пространства вокруг своего самолета, именуемые областью предупреждения и областью повышенного внимания.
Поскольку БСПС-2015 построена по принципу вычисления времени до возможного столкновения, то размеры и форма соответствующих областей автоматически меняются в зависимости от скорости сближения с конфликтующим самолетом и его курсового угла.
Периметр области повышенного внимания находится в 20–48 секундах полета от рассчитанного БСПС-2015 времени вторжения конфликтующего ВС в зону столкновения.
Периметр области предупреждения находится в 15–35 секундах полета от времени вторжения в зону столкновения.
Если ВС вошло в область повышенного внимания, то БСПС-2015 воспринимает его как конфликтующее ВС и выдает консультативную информацию о воздушном движении (ТА).
Это сообщение состоит из голосового предупреждения и визуального сигнала на индикаторе БСПС-2015, показывающего дальность, относительную высоту и курсовой угол конфликтующего самолета. ТА предназначены для оказания содействия летному экипажу в осуществлении наблюдения за движением находящихся вблизи самолетов, которые впоследствии могут явиться причиной выдачи рекомендаций по разрешению угрозы столкновения.
Если конфликтующий самолет входит в область предупреждения, то БСПС-2015 выдает рекомендации по разрешению угрозы столкновения (RA), предписывающие маневры в вертикальной плоскости, которые по данным прогноза обеспечат увеличение или удержание интервала эшелонирования относительно представляющего угрозу самолета.
Назначение
БСПС-2015 предназначена для:
обнаружения потенциальной угрозы столкновения в воздухе с ВС, оборудованными ответчиками ВОРЛ режимов A/C/S и ВС, оборудованными системой типа БСПС II
выработки и предоставления экипажу ВС консультативной информации о воздушном движении и рекомендаций на выполнение маневра в вертикальной плоскости для предотвращения потенциальной угрозы столкновения
Функции
По ВС, оборудованным ответчиками ВОРЛ режима A/C/S, БСПС-2015 обеспечивает реализацию следующих основных функций:
наблюдение по ответам режимов A/C/S
наблюдение по самогенерируемым сигналам АЗН-В
совместное наблюдение за воздушной обстановкой по информации от МН РЛС (позволяет определять траектории целей, не оснащенных ответчиками ВОРЛ)
выработка консультативной информации о воздушном движении (ТА)
обнаружение угрозы столкновения ВС в воздухе
выработка рекомендаций по предотвращению угрозы столкновения (RA) на выполнение маневра в вертикальной плоскости
координация маневра с ВС, оборудованными БСПС II в вертикальной плоскости
Состав
Вычислительный блок
Ответчик системы ВОРЛ
Антенна всенаправленная
Пульт управления
Антенна направленная
Индикация
Рекомендуемая вертикальная скорость
Относительное местоположение целей
с обозначением уровня опасности
Вариант отображения целей,
в том числе целей без ответчика режима S
в секторе обзора МН РЛС-2015
Конкурентные преимущества
обеспечена возможность подтверждения полученного в Авиарегистре России сертификата годности комплектующего изделия за рубежом благодаря наличию документов, подтверждающих полное соответствие процессов создания и квалификации БСПС-2015 требованиям FAA и EASA
обеспечена полнота контроля 95% без применения контрольно-проверочной аппаратуры
обеспечен высокий уровень отказобезопасности и информационной безопасности за счёт применения отечественной операционной системы реального времени СТРИКС, соответствующей ARINC 653
обеспечена высокая конкурентоспособность системы благодаря соответствию уровня разработки изделиям ведущих мировых производителей, а также реализации инновационных функций, таких как введение дополнительной фазовой манипуляции в сигналы, а также совместное наблюдение за воздушной обстановкой по информации от БСПС-2015 и МН РЛС-2015
Стандарты
АР МАК Р4754A Руководство по процессам сертификации высокоинтегрированных сложных бортовых систем воздушных судов гражданской авиации
АР МАК Р4761 Руководство и методы реализации процесса оценки безопасности бортовых систем и оборудования гражданских самолётов
АР МАК КТ-254 Руководство по гарантии конструирования бортовой электронной аппаратуры
АР МАК КТ-178C Требования к программному обеспечению бортовой аппаратуры и систем при сертификации авиационной техники
АР МАК КТ-160G Условия эксплуатации и окружающей среды для бортового авиационного оборудования. Требования, нормы и методы испытаний
ARINC 615A Программный загрузчик данных с использованием интерфейса Ethernet
ARINC 735В-2 Функции TCAS и ADS-B для вычислителя трафика
ARINC 718A-4 Транспондер управления воздушным движением (ATCRBS/MODE S)
RTCA DO-185B Минимальные технические требования к системе предупреждения столкновений воздушных судов II (TCAS II)
RTCA DO-300А Минимальные технические требования к системе предупреждения столкновений воздушных судов II (TCAS II) гибридного наблюдения
RTCA DO-181E Минимальные технические требования к системе бортового локатора маяка по управлению воздушным движением/ выбору режимов (ATCRBS/Mode S)
RTCA DO-260В Минимальные технические требования к системе для автоматического зависимого наблюдения с расширенным сквиттером 1090 МГц — вещание (ADS-B) и службы информации о трафике — вещание (TIS-B)
Специальный выпуск: проектирование и оптимизация траектории самолета
Уважаемые коллеги,
За последние годы увеличилось количество авиаперевозок, что принесло положительные результаты в виде увеличения потока пассажиров и товаров. Однако это увеличение трафика привело к более высоким уровням загрязнения, выбрасываемого в атмосферу из-за сжигания ископаемого топлива, а также из-за насыщения различных воздушных зон. Эти негативные последствия будут усугубляться, поскольку количество самолетов, находящихся в эксплуатации, в ближайшие годы увеличится, поскольку рынки Латинской Америки и Азии продолжают развиваться.
Решение этих проблем состоит в разработке эффективных опорных траекторий, по которым должны следовать самолеты, летящие к месту назначения. Эффективные траектории в идеале приводят как к сокращению времени полета, так и к сокращению расхода топлива. Таким образом можно уменьшить загрязнение, а также снизить расходы на перелет. Это относится как к воздушным судам, так и к воздушным судам, движущимся в пределах рулежных дорожек в аэропорту.
Конечная цель траекторий самолета — полет по концепции свободного полета. Это означает, что самолеты будут следовать сокращенным правилам эшелонирования, позволяющим самолетам летать практически в любом месте поискового пространства.Таким образом, пропускная способность воздушного пространства может быть увеличена. Концепция свободного полета, как следствие, ставит новые задачи при проектировании траектории самолета. Например, должны быть реализованы средства эффективного согласования между самолетами, поскольку многие самолеты могут захотеть лететь по одному и тому же маршруту (т. Е. Следовать за реактивным потоком), а альтернативные траектории должны быть рассчитаны из-за ухудшения дорожного движения или погодных условий. Эти новые траектории должны также учитывать требуемые ограничения по времени прибытия в разные точки пути.
Подобные проблемы могут возникнуть с дронами и БПЛА. Например, может потребоваться наиболее экономичная траектория для покрытия самой большой площади доступной энергией. Могут присутствовать аналогичные проблемы при переговорах, такие как те, которые встречаются с обычными самолетами. Это верно для групповых полетов или независимых дронов, летящих по аналогичным траекториям. Также могут потребоваться переговоры с обычными самолетами, поскольку дроны делят воздушное пространство с обычными самолетами.
Специальный выпуск посвящен широким темам, связанным с проектированием траектории самолета, и приветствует статьи, касающиеся, помимо прочего, ( i ) проектирования траектории самолета, ( ii ) оптимизации траектории самолета, ( iii ) расчета траекторий загрязнения, ( iv ) согласование траектории самолета, ( v ) оптимизация разгона, ( vi ) управление воздушным пространством, ( vii ) прогнозы погоды и большие данные, ( viii ) наборы вариантов траектории и изменение маршрута и ( ix ) траектории дронов и БПЛА.
Доктор Алехандро Мурриета-Мендоса
Приглашенный редактор
Информация для подачи рукописей
Рукописи должны быть представлены онлайн по адресу www.mdpi.com, зарегистрировавшись и войдя на этот сайт. После регистрации щелкните здесь, чтобы перейти к форме отправки. Рукописи можно подавать до установленного срока. Все статьи будут рецензироваться. Принятые статьи будут постоянно публиковаться в журнале (как только они будут приняты) и будут перечислены вместе на веб-сайте специального выпуска.Приглашаются исследовательские статьи, обзорные статьи, а также короткие сообщения. Для запланированных статей название и краткое резюме (около 100 слов) можно отправить в редакцию для объявления на этом сайте.
Представленные рукописи не должны были публиковаться ранее или рассматриваться для публикации в другом месте (за исключением трудов конференции). Все рукописи тщательно рецензируются в рамках процесса одинарного слепого рецензирования. Руководство для авторов и другая важная информация для подачи рукописей доступна на странице Инструкции для авторов. Aerospace — это международный рецензируемый ежемесячный журнал с открытым доступом, публикуемый MDPI.
Пожалуйста, посетите страницу Инструкции для авторов перед отправкой рукописи. Плата за обработку статьи (APC) для публикации в этом журнале с открытым доступом составляет 1600 швейцарских франков. Представленные документы должны быть хорошо отформатированы и написаны на хорошем английском языке. Авторы могут использовать MDPI Услуги редактирования на английском языке перед публикацией или во время редактирования автора.
Операции на основе траектории (TBO)
Обзор TBO
Операции на основе траектории (TBO) — это концепция организации воздушного движения (ОрВД), которая улучшает стратегическое планирование потоков воздушных судов для уменьшения дисбаланса пропускной способности и потребности в Национальной системе воздушного пространства (NAS) и предоставляет инструменты для персонала и диспетчеров управления воздушным движением. для ускорения движения самолетов между аэропортами отправления и назначения.Благодаря усовершенствованному стратегическому планированию и управлению транспортными потоками, TBO помогает уменьшить количество ответных решений и использование статических ограничений на количество миль в пути.
Траектория самолета — основной арендатор TBO. Определенная в четырех измерениях — широта, долгота, высота и время — траектория представляет собой общий ориентир того, где, как ожидается, будет находиться самолет, и когда — в ключевых точках на своем маршруте. Траектория определяется перед вылетом, обновляется в соответствии с возникающими условиями и действиями оператора и распределяется между заинтересованными сторонами и системами.Совокупный набор траекторий воздушных судов в день эксплуатации определяет спрос и дает информацию о действиях по управлению движением. «Операционный день» относится к рабочим условиям в течение дня, когда выполняется операция, включая отключение оборудования, погоду, условия в аэропорту, задержки и отмены рейсов авиакомпаний, а также другие временные условия в NAS.
Ключевые элементы TBO включают:
- Управление на основе времени (TBM), которое помогает управлять потоками и траекториями движения путем планирования и измерения воздушных судов через перегруженные ресурсы NAS или точки ограничений. Навигация на основе характеристик
- (PBN), которая позволяет воздушным судам более точно перемещаться по своим траекториям и позволяет использовать инструменты поддержки принятия решений для улучшения выполнимости графиков для точек ограничений, а также для достижения большего соответствия графикам .
- Enabling Technologies, которые расширяют и автоматизируют обмен общей информацией о траекториях воздушных судов и включают общесистемное управление информацией (SWIM), передачу данных, расширенный обмен данными и многие другие.
FAA предоставляет поддержку принятия решений для TBO путем развития усовершенствований и интеграции двух устаревших и одной новой платформ автоматизации: системы управления потоками трафика, управления потоками на основе времени и диспетчера данных потока на терминалах. Эти системы, также известные как «три Т», помогают укрепить стратегическое планирование и устранение дисбаланса между мощностью и спросом в течение рабочего дня.
Хотя предполагается, что использование TBM станет преобладающим аспектом ATM, спрос на трафик и эксплуатационные потребности будут стимулировать адаптацию систем в NAS и степень их активного использования в течение дня работы.Аэропорт или воздушное пространство может не нуждаться в прямом доступе к инструментам TBM, потому что они испытывают редкие и краткосрочные диспропорции между спросом и пропускной способностью. Однако доступность и использование инструментов и инфраструктуры TBM в определенной области NAS определяется как местными, так и общими потребностями и тенденциями NAS. В результате на потоки движения на объектах без прямого доступа к инструментам TBM могут по-прежнему влиять действия на соседних объектах или в командном центре системы управления воздушным движением. В местах, где нет прямого доступа к инструментам TBM, или в периоды без активного TBM, система будет продолжать работать так же, как и сегодня.
Для получения дополнительной информации или вопросов о TBO, пожалуйста, свяжитесь с [email protected]
Последнее изменение страницы:
Оптимизация траектории самолета с динамическими входными переменными
Международная организация гражданской авиации (ИКАО): 999 Бульвар Роберта Бурасса, Монреаль, Квебек, Канада h4C 5H7. PANS-ATM, Процедуры для навигационного обслуживания — организация воздушного движения, Doc 4444, 16-е издание, номер для заказа: 4444, ISBN 978-92-9258-081-0 (2016)
Розенов, Дж., Шульц, М .: 4D-прогнозирование траектории со стохастическими входными параметрами, в Advanced Aircraft Efficiency in a Global Air Transport System, Toulouse (2018)
Lindner, M., Zeh, T. , Фрике, Х .: Повторная оптимизация траекторий полета 4D во время полета с учетом неопределенностей прогноза, на 67-й конференции DGLR Kongress, Фридрихсхафен (2018)
Экспериментальный центр Евроконтроля: Технический / научный отчет ЕЭК № 2009-009, Евроконтроль , Брюссель (2009)
Национальное управление океанических и атмосферных исследований (NOAA) .: Rapid Refresh (RAP), [Online]. Доступно: https://rapidrefresh.noaa.gov/ (2018). По состоянию на 15 мая 2018 г.
Büchter KD, Sizmann, A .: High-Bandwith Aeronautical Telecommunication Options, 63th DGLR Kongress, Augsburg (2014)
Совместное предприятие SESAR: Европейский генеральный план ОрВД, Бельгия (2015)
Международная организация гражданской авиации: Блочная модернизация авиационной системы — ASBU (2013)
Hargraves, C.R., Paris, S .: Прямая оптимизация траектории с использованием нелинейного программирования и коллокации. J. Guid. Контроль. Дин. 10 (4), 338–342 (1987)
Статья Google ученый
У. Рингерз: Оптимизация траектории самолета как приложение для беспроводного Интернета. J. Aerosp. Comput. Инф. Commun. 1 , 85–99 (2004)
Статья Google ученый
Шридхар, Б., Нг, Х., Чен, Н .: Оптимизация траектории самолета и предотвращение инверсионных следов при ветре. J. Guid. Control Dyn. 34 (5), 1577–1584 (2011)
Статья Google ученый
Солер, М., Цзоу, Б., Хансен, М .: Расчет траектории полета при наличии инверсионных следов: применение многофазного подхода оптимального смешанного целочисленного управления. Пер. Res. C 48 , 172–194 (2014)
Артикул Google ученый
Murietta, M., Botez, R.M .: Алгоритм оптимизации траектории вертикальной навигации для коммерческого самолета. Американский институт аэронавтики, США (2014)
Google ученый
Патрон, Р.С., Ботез, Р.М., Труда, Д.: Оптимизация траектории полета с помощью генетических алгоритмов, сочетающих вертикальные и боковые профили, на Международном конгрессе и выставке машиностроения ASME 2014, Монреаль (2014)
Викрамасингхе, Н.К., Харада, А., Тотоки, Х., Миямото, Ю., Миядзава, Ю.: Оптимизация траектории полета для современных реактивных пассажирских самолетов с динамическим программированием. Организация и системы воздушного движения, стр. 87–104. Спрингер, Токио (2014)
Google ученый
Джардин М.Р., Брайсон А.Э .: Методы расчета траекторий за минимальное время при сильном ветре. J. Guid. Control Dyn. 35 (1), 165–171 (2012)
Статья Google ученый
Розенов, Дж., Ферстер, С., Линднер, М., Фрике, Х .: Влияние траекторий, оптимизированных для нескольких критериев, на плотность, эффективность и окружающую среду в Европе, Семинар по ОрВД, Сиэтл (2017)
Розенов, Дж., Линднер, М., Фрике, Х .: Влияние климатических затрат на сеть авиакомпаний и оптимизацию траектории: параметрическое исследование. CEAS Aeronaut. J. 8 (2), 371–384 (2017)
Статья Google ученый
Фёрстер, С., Розенов, Дж., Линднер, М., Фрике, Х .: Набор инструментов для оптимизации траекторий в реальных погодных условиях и реалистичных характеристик полета. Greener Aviation, Брюссель (2016)
Google ученый
Розенов, Дж., Фрике, Х .: Моделирование летных характеристик для оптимизации траекторий », в 65. DGLR Kongress, Брауншвейг (2016)
Гонсалес-Аррибас, Д., Солер, М. ., Санджурджо, М .: Надежная оптимизация траектории на основе ветра с использованием метеорологических ансамблевых вероятностных прогнозов, в Sixth SESAR Innvation Days, Делфт (2016)
Камгарпур, М., Дадок, В., Томлин, Ч .: Создание траектории для самолета, подверженного динамической погодной неопределенности, на 49-й конференции IEEE по принятию решений и управлению, Атланта, США (2010)
Совместное предприятие SESAR, План совместной работы Clean Sky 2 на 2014-2015 гг., SJU (2014)
Pacelab: Практический пример: эффективность использования топлива берет свое начало, PACE, Берлин (2016)
Honeywell: оптимизация полета Godirect , описание продукта, Phoenix, (2017)
Форстер, К., Риттер, А., Гемза, С., Таффернер, А., Стич, Д.: Спутниковое прогнозирование грозы в реальном времени для стратегического планирования полетов по маршруту. J. Air Trans. 24 (4), 113–124 (2016)
Статья Google ученый
Woods, SE., Vivona, RA, Roscoe, DA., LeFebvre, BC., Wing, DJ., Ballin, MG: приложение для кабины пилота для оптимизации траектории с учетом трафика, в AIAA Guidance Конференция по навигации и управлению (GNC), Бостон (2013)
Крыло, DJ. Берк, К.А., Хендерсон, Дж., Вивона, Р., А., Вудворд. J., «Первоначальное внедрение и эксплуатационное использование tasar в полетах авиакомпании alaska airlines», Конференция по авиационным технологиям, интеграции и эксплуатации, Атланта (2018)
Lindner, M., Förster, S., Rosenow, Дж., Фрике, Х .: Экологическое воздействие зон взимания платы за управление воздушным движением на маршруте в траекториях, оптимизированных по нескольким критериям, Greener Aviation, Брюссель (2016)
Розенов, Дж., Фрике, Х., Лучкова, Т., Шульц, М .: Влияние оптимизированных траекторий на управление потоками воздушного движения. Аэронавт. J. 123 (1260), 157–173 (2019)
Статья Google ученый
Национальные центры экологических прогнозов / Национальная служба погоды / NOAA / США. Министерство торговли: NCEP GFS 0.25 Degree Global Forecast Grids Historical Archive. Архив исследовательских данных Национального центра атмосферных исследований, Лаборатория вычислительных и информационных систем, https: // doi.org / 10.5065 / D65D8PWK (2015)
Rosenow, J., Förster.S., Fricke, H .: Непрерывный набор высоты с минимальным расходом топлива, в Sixth SESAR Innovation Days, Делфт (2016)
Муйе В., Нуич А., Касадо Э., Лопес Леонес Дж. Оценка применимости модели летно-технических характеристик современного самолета к оптимизации траектории, в 37-й конференции IEEE / AIAA по системам цифровой авионики (DASC). https://doi.org/10.1109/dasc.2018.8569732 (2018)
Джокич, Дж., Исследование сложности воздушного движения как фактора нагрузки диспетчера, Дрезден: докторская диссертация (2014)
Розенов Дж., Фрике Х., Шульц М .: Воздух Моделирование движения с траекториями, оптимизированными по нескольким критериям, в материалах конференции Winter Simulation Conference 2017, Лас-Вегас (2017)
Розенов Дж., Фрике Х .: Влияние траекторий, оптимизированных по нескольким критериям, на эффективность европейских авиакомпаний , безопасность и потребность в воздушном пространстве. J. Air Trans.Manag. (2019). https://doi.org/10.1016/j.jairtraman.2019.01.001
Артикул Google ученый
Международная организация гражданской авиации, «Приложение мобильных технологий 4G / 5G в гражданской авиации», на 13-й Аэронавигационной конференции, Монреаль (2018)
Евроконтроль, «Веб-портал хранилища данных по запросу», [ Онлайн]. Доступно: http://www.eurocontrol.int/articles/ddr2-web-portal. По состоянию на 14 января 2018 г.
Национальные центры экологического прогнозирования NCEP / NOAA, NCEP Products Inventory, [Online]. Доступно: http://www.nco.ncep.noaa.gov/pmb/products/gfs/. По состоянию на 2018 год
Poles, D., Nuic, A., Mouillet, V.: Расширенное моделирование характеристик самолета для ОрВД: анализ возможностей модели BADA, Eurocontrol, Brétigny-sur-Orge (2010)
Евроконтроль, Отчет об обзоре эффективности 2016, Бельгия, 06/2017
Исследование метода прогнозирования траектории в полете самолета на основе летно-технических характеристик самолета и исторических данных курса
Традиционное прогнозирование траектории в 4D на основе моделей летно-технических характеристик и процедур полета не выполняется. учитывать правила передачи управления.Между тем, метод, основанный на интеллектуальном анализе исторических данных, не может точно сочетаться с условиями реального времени, такими как погода, а также вызывает проблемы с эффективностью вычислений. В рамках этого проекта было собрано большое количество исторических данных для формирования базы данных об опыте управления и проанализировано историческое значение базы данных, чтобы получить сведения об опыте управления и намерении полета. На основе традиционной модели летательных аппаратов в этой статье предлагается режим маневра самолета с использованием стратегии и вводится информация о высокогорном ветре из информации о погоде в четырехмерную модель самолета для оптимизации четырехмерной модели расчета траектории самолета.Сравнивая время прогноза полета с реальным временем пересечения, было обнаружено, что средняя ошибка улучшенного времени пересечения 4D-прогноза составляет менее 5% от времени полета, что, очевидно, лучше, чем до оптимизации. Доказано, что оптимизированный метод, основанный на исторических данных трека, эффективен и надежен, а точность предсказания трека 4D значительно улучшена.
1. Введение
С развитием гражданской авиации на траектории полета появляется все больше и больше самолетов, интервалы между полетами все меньше и меньше, а ситуация с безопасностью воздушного движения становится все более серьезной.Задержки рейсов не только приносят прямые экономические убытки пассажирам и авиакомпаниям, но и влияют на развитие национальной экономики. В последние годы все большую популярность приобрели автоматические и интеллектуальные методы управления воздушным движением [1], такие как обнаружение и разрешение конфликтов самолетов [2], последовательность захода на посадку и вылет [3] и операции на основе траектории [4]. Целью этих методов является повышение эффективности воздушного движения и обеспечение безопасности воздушного движения [5]. Быстрое и точное прогнозирование траектории самолета является основой и гарантией реализации вышеуказанных методов [6].
Прогнозирование пути 4D (4-мерное) предназначено для прогнозирования и вычисления точек пути 4D, которые будут созданы во время полета в соответствии с информацией о впечатлениях и информацией первоначального плана, когда полет не состоится. В настоящее время существует два основных метода прогнозирования траектории полета самолета в 4D [7–10]. Один из них заключается в синтезе всех видов информации, таких как тип, местоположение, высота, скорость аэропорта вылета, аэропорт посадки и пункт сообщения, в информации о плане, стандартные процедуры полета самолета, крейсерская высота и скорость самолета, а также преобразование высоты, чтобы сформировать горизонтальную траекторию, высотную траекторию и траекторию скорости с использованием модели летно-технических характеристик самолета.В этом процессе, принимая во внимание влияние высокогорного ветра на путевую скорость самолета, три профиля обрабатываются независимо и связываются для расчета 4D траектории самолета. Могут быть получены координаты, скорость, высота и сектор контроля полета, проходящего через каждую точку донесения. Например, в [11] предлагается метод прогнозирования четырехмерной траектории руления для самолета на поверхности аэропорта на основе подгонки профиля скорости. В [12] Шустер опирается на существующую модель прогнозирования траектории полета (TP) и разрабатывает новые методы прогнозирования траекторий самолета для переходов между наземной фазой полета и фазой полета по маршруту и наземной фазой.Остальные параметры были взяты из модели BADA (Base of Aircraft Date) 3.7. Du et al. [13] предложили 7 видов моделей сегментов пути на основе метода объекта маршрута и построили горизонтальный путь в соответствии с географическим распределением плана полета, инструкциями по управлению и навигационным оборудованием, а также важными параметрами (скороподъемность, скорость снижения, тяга. , крейсерское число Маха и т. д.), необходимые для моделирования вертикального профиля, просто рассчитываются и оптимизируются. Майкл Кайзер и др. представить аналитическую модель летно-технических характеристик самолета и применить полученные результаты для точного прогнозирования характеристик расхода топлива в качестве основного параметра для планирования траектории [14].Представленная модель улучшенных характеристик реактивной струи обеспечивает значительное улучшение по сравнению с применяемым в настоящее время методом прогнозирования траектории. Модель летательных аппаратов была построена на основе BADA 4, чтобы генерировать траектории в [15], и мультимодальный подход для модели самолета используется для решения проблемы генерации сложной оптимальной траектории за счет уменьшения размера.
Другой метод прогнозирования треков основан на интеллектуальном анализе данных треков с развитием технологий больших данных.Исторические данные трека — это надежная запись прошлых условий полета, которые включают все возможные факторы, влияющие на работу самолета, такие как изменения в планах полета, правилах и опыте управления, а также погодные условия. Эта информация может быть добыта для анализа шаблонов дорожек и использована при прогнозировании дорожек для повышения точности прогнозирования. Например, Zhao et al. предложила нейронную сеть с глубокой долгосрочной краткосрочной памятью (D-LSTM) для прогнозирования траектории самолета, которая улучшает точность прогнозирования самолета в сложных условиях полета [16].Zeng et al. [17] сформулировал задачу четырехмерного прогнозирования траектории как проблему обучения от последовательности к последовательности и предложил сеть глубокой краткосрочной памяти от последовательности к последовательности (SS-DLSTM) для прогнозирования траектории. Габриэль и др. взять точки поворота как объекты кластеризации и использовать метод кластеризации для сортировки данных трека и исключения трека вылета для извлечения типичного трека, который используется для наблюдения и прогнозирования воздушных судов, но потеря информации трека больше, и отсутствует информации о высоте и времени [18].Zhao et al. [19] предложил улучшенный метод кластеризации треков на основе плотности для прогнозирования треков путем комбинирования взвешенного манхэттенского расстояния со штрафным коэффициентом. Qian et al. [20] предложили модель прогнозирования траектории воздушной цели на основе нейронной сети обратного распространения, которая может адаптивно кластеризовать данные траектории цели и извлекать правило области движения конкретной цели.
Первый метод 4D прогнозирования траектории, основанный на модели летно-технических характеристик самолета, трудно гарантировать точность прогнозирования траектории без учета погодной модели или оценки фактического намерения самолета.Например, перемещение воздушного судна между различными зонами управления регулируется соответствующими протокольными ограничениями положений о передаче управления, и такие правила передачи управления и характеристики изменения высоты трудно учесть в стандартных процедурах полета. Это вызовет более очевидную ошибку прогноза. Второй алгоритм прогнозирования трека, основанный на технологии больших данных, полностью использует характеристики истории полета, но нелегко интегрировать другие факторы, влияющие на полет, такие как погода в реальном времени и временное изменение траектории полета.С другой стороны, большой объем данных о воздушных перевозках, несколько типов данных и различные характеристики распределения данных приведут к низкой эффективности процесса прогнозирования фактического пути и не могут удовлетворить требования в реальном времени. Кроме того, аномальный трек имеет большое влияние на создание репрезентативного трека, а также влияет на прогноз.
Для решения этой проблемы в данном документе будут в полной мере использованы преимущества моделей летно-технических характеристик воздушного судна и рассмотрено получение эмпирических параметров из исторических данных траектории (например, сообщения о двухточечной высоте), чтобы отразить фактическое намерение управления, и разработан метод расчета связи этих двух.В то же время, принимая во внимание влияние высокогорного ветра, точность прогнозирования траектории 4D может быть улучшена, а результаты предсказания сравниваются с фактическими данными радиолокационного трека для проверки эффективности метода.
2. Анализ исторических данных
В этом документе исторические данные трека собираются в течение определенного периода времени, и полученные данные трека объединяются, очищенные данные сопоставляются с соответствующими данными плана полета и таблицей записей полета. самолета установлен.Каждая запись полета состоит из типа воздушного судна, номера рейса, маршрута, запланированного времени взлета, запланированного времени посадки, фактического времени взлета, фактического времени посадки, аэропорта отправления, аэропорта назначения, точки трека, широты и долготы, времени транзита, скорости транзита, транзита. высота и другие атрибуты. Удалите недопустимую запись о том, что номер рейса пуст, добавьте поле серийного номера и отсортируйте по времени доставки от времени вылета до времени посадки рейса. Номер рейса, тип самолета, серийный номер, фактическое время отправления, аэропорт отправления, аэропорт назначения, точка трека, широта и долгота, время транзита, скорость транзита и высота транзита переносятся в распределенную базу данных HBase кластера Hadoop.Данные метеорологического прогноза GRIB (Gridded Binary) за тот же период анализируются и помещаются в базу данных, чтобы предоставить необходимую информацию метеорологического прогноза для интеллектуального анализа данных.
Затем первым шагом является получение фактической информации о точке пересечения точки подключения. В зависимости от времени запуска маршрута создается база данных национальных моделей маршрута, которая в основном содержит 5 атрибутов, а именно: номер маршрута, время запуска, время окончания, точку сообщения маршрута, а также широту и долготу.Модель отображения файла данных создается с использованием записи полета (связанный полевой маршрут) и базы данных национальных моделей маршрута (связанный номер полевого маршрута). Необработанные данные карты хранятся в HBase для промежуточных данных, содержащих только точки отчета о маршруте и точки трека. При использовании формулы расстояния между двумя точками временно сохраняются точки отчета и точки трека, которые меньше определенного порога (20 км). Возьмите минимальное расстояние от точки отслеживания, чтобы заменить точку отслеживания, а высота точки пересечения точки отслеживания является высотой точки пересечения точки отслеживания.
Второй шаг — получить уровни высоты точки передачи и точки трека. В соответствии со стандартом воздушного пространства с RVSM в Китае создана база данных параметров высотных уровней, которая в основном содержит три атрибута: порядковый номер высотного уровня, низковысотный уровень и высотный уровень. Модель отображения файла данных строится с использованием национальной базы данных моделей маршрутов (поля ассоциаций — это низковысотный уровень и высотный уровень), а исходные данные о высоте точки передачи и точки трека сопоставляются с высотой уровни.
Используя уровни высоты, полученные с помощью вышеперечисленных шагов, опытный уровень высоты каждой точки передачи в условиях одного и того же аэропорта, того же типа воздушного судна и одного и того же маршрута получается с помощью алгоритма жесткой кластеризации k-средних, а затем наносится на карту на высоту высотного слоя.
Кластеризация K-средних также известна как быстрая кластеризация или динамическая кластеризация. Перед кластеризацией необходимо определить классификационный номер k в соответствии с конкретной задачей и разделить данные на кластеры k в соответствии с функцией расстояния посредством итеративного процесса, чтобы оптимизировать функцию критерия для оценки производительности кластеризации. [21].
Предположим, что выборка наблюдения X содержит n точек выборки, X = {,,…,}. В этой статье для оценки сходства используется евклидово расстояние (4):
Алгоритм k-средних использует функцию критерия суммы квадратов ошибок для оценки эффективности кластеризации. Предположим, что X содержит k подмножеств кластеризации X 1 , X 2 ,…, X k , а количество точек выборки каждого подмножества составляет n 1 , n 2 ,…, n k , среднее значение каждого подмножества составляет m 1 , m 2 ,…, m k , а затем Формула целевой функции суммы квадратов ошибок имеет следующий вид:
С другой стороны, используя информацию об уровне высоты точек трека и время прохождения точек трека в записи полета в качестве основной информации для расчета высота крейсерского полета, информация о времени полета ниже определенного диапазона (10 минут) удаляется.Уровень высоты каждого полета с наибольшей продолжительностью затем получается как крейсерская высота. Связав путевую скорость точки трека с самым длинным временем с исторической скоростью ветра на большой высоте в положении точки трека, получается скорость в вакууме для каждой точки трека. Затем скорость вакуума крейсерской фазы получается с использованием метода средних значений.
Информация о данных, полученная в результате вышеупомянутого процесса вычислений, записывается, и создается таблица информации данных о маршруте.Конкретная информация записи включает в себя тип воздушного судна, номер рейса, аэропорт вылета, аэропорт назначения, название точки донесения, уровень высоты точки донесения, высоту крейсерского полета и маршрут.
3. Моделирование профиля полета на основе летно-технических характеристик ВС
Для полученной, созданной, измененной или извлеченной информации обработки плана полета опытная информация о точке передачи в таблице информации о маршруте, полученной в Разделе 2, используется для замены указать высоту точки и крейсерскую высоту в плане полета.В сочетании с метеорологической прогнозной информацией за полученный период создается четырехмерная модель прогнозирования траектории, основанная на намерении управления и модели летно-технических характеристик воздушного судна.
В соответствии с характеристиками фазы полета прогнозируемая траектория 4D делится на три части: горизонтальный профиль, профиль высоты и профиль скорости, как показано на рисунке 1. Идея моделирования: во-первых, синтезировать двумерную горизонтальную траекторию полета из от начальной точки до конечной точки, а затем изучите профиль скорости и профиль высоты вдоль известной горизонтальной траектории, чтобы реализовать расчет моделирования пути 4D.
3.1. Горизонтальный профиль полета
От горизонтального пути типичной траектории полета самолет обычно летит по прямой от одной точки к другой, затем разворачивается вокруг этой точки или около нее и выходит на новый курс, а затем летит по прямой. опять таки. Таким образом, горизонтальное движение самолета в основном включает модель линейного движения и модель поворотного движения [22]. Ориентируясь на вращательное движение, в этой статье используется модель токарной обработки с внутренним сдвигом.Как показано на рисунке 2, радиус поворота равен, а угол наклона поворота равен. Для взлетной ступени общее значение составляет около 15 °. Самолет летит прямо из точки P1 в точку P2, разворачивается в точке P с радиусом поворота R2 и пересекает новый курс в точке Q. Координаты долготы и широты точек P1, P2 и P3 были известны. Декартовы координаты (,) ( i = 1, 2,…) были получены преобразованием координат.
Курс
По курсу двух прямых участков можно получить угол поворота ЛА:
Значение функцииследующее: когда и, повернуть направо; когда и, идите прямо; когда и поверните налево.
В соответствии с углами поворота и радиусом поворота мы можем получить C 2 , расстояние полета, расстояние поворота и координаты начальной и конечной точек поворота.
3.2. Профиль высоты и скорости
В процессе построения летной модели самолета, без особых условий, траектория полета по умолчанию состоит в том, чтобы сначала набрать крейсерскую высоту, а затем пролететь расстояние на крейсерской высоте в соответствии со стандартными процедурами полета. и, наконец, выполните стандартную процедуру спуска, чтобы приземлиться в аэропорту.Например, фазу подъема можно смоделировать, как показано на рисунке 3. А фазу спуска можно смоделировать, как показано на рисунке 4.
3.2.1. Модель летно-технических характеристик самолета
Для каждого этапа законы скорости и высоты решаются на основе модели летно-технических характеристик самолета. BADA — это база данных летных характеристик, разработанная французским центром EC (EuroControl), которая содержит различные типы параметров летательных аппаратов и параметры операционной программы [12, 15].BADA основан на модели TEM (Total Energy Model) самолета, и самолет моделируется как частица. Сила, действующая на самолет, показана на рисунке 5. Работа, совершаемая результирующей силой, действующей на самолет, равна приращению кинетической энергии и потенциальной энергии самолета: где — масса самолета; скорость вакуума; это тяга; сопротивление; — ускорение свободного падения; и — угол набора высоты / снижения самолета.
Скорость увеличения и уменьшения следующая: где — высота.- коэффициент распределения энергии. Его можно преобразовать в функцию числа Маха, представляющего отношение тяги, используемой для набора высоты, к тяге, используемой для ускорения при подъеме с выбранной скоростью. Метод описан в [22].
3.2.2. Обработка метеорологических условий
Влияние метеорологических факторов на прогнозирование траектории полета было изучено с использованием информации о высотном ветре из метеорологического отчета GRIB [15]. Сводка погоды GRIB публикуется WAFS (Всемирная система прогнозов зон).В соответствии с необходимостью расчета, данные о высотном ветре / температуре в GRIB были проанализированы и интерполированы, и были даны сетки высотной скорости ветра, направления ветра и температуры для различных широт и долгот, а также сетки высотного слоя. В соответствии с информацией о местоположении и высоте прогнозируемого маршрута был вызван соответствующий высокогорный ветер (), и соответствующая скорость относительно земли () была получена путем вычисления вектора с расчетной скоростью в вакууме (), как показано на рисунке 6, и, таким образом, , исправлены результаты прогноза трека.Аналогичным образом, для крейсерской скорости, полученной в разделе 2, скорость в вакууме получается путем вычисления путевой скорости относительно земли и вектора скорости ветра.
3.3. Профильная муфта
На основе информации о запланированном расстоянии и местоположении начальных точек отчетности вычисляются географические координаты прогнозируемых точек траектории, и соответствующие результаты скорости и высоты в профилях скорости и высоты получают с учетом расстояние.Наконец, получают прогнозируемое время прохождения, высоту прохождения и координаты местоположения всех точек траектории и точек наблюдения.
4. Метод коррекции с историческими эмпирическими параметрами
В реальном процессе полета самолету необходимо принимать разные команды управления при прохождении через разные зоны управления. На основе протокола передачи сектора необходимо дать команду воздушному судну войти в назначенный эшелон полета и перейти к следующему контрольному сектору посредством регулировки высоты.Требования по ограничению высоты между различными секторами повлияют на высоту прибытия воздушных судов в каждую точку донесения. При вычислении прогноза траектории высота опытной точки каждой отчетной точки, полученной в результате исторического исследования траектории, принимается в качестве целевой высоты, и воздушные суда должны следовать за каждой указанной высотой при прохождении через каждую отчетную точку. На основе стандартной процедуры полета мы предлагаем разделить процесс полета от одной точки донесения 1 до другой точки донесения 2 на три режима расчета, как показано на рисунке 7.
Режим 1: самолет набирает / спускается с высоты отчетной точки P1 до высоты отчетной точки P2, и положение набора высоты / снижения соответствует модели летно-технических характеристик самолета. Достигнув высоты отчетной точки P2, он летит горизонтально, чтобы сообщить о точке P2; Режим 2: воздушное судно летит горизонтально на расстояние на высоте точки передачи сообщений P1, а затем набирает / спускается с высоты точки передачи сообщений P1 до высоты точки передачи сообщений P2.Положение подъема / спуска соответствует летно-технической модели самолета; Режим 3: воздушное судно набирает высоту с высоты отчетной точки P1 до крейсерской высоты, а затем набирает / спускается с крейсерской высоты, чтобы сообщить о точке P2. Положение набора высоты / снижения соответствует летно-технической модели самолета.
В соответствии с положением текущей расчетной точки и следующей расчетной точки в общем маршруте и положением между двумя точками выбираются три прогнозируемых режима полета. Мы разработали следующий метод использования: Шаг 1: сначала предположим, что текущее расстояние вычисляемой точки составляет S 0 .На основе моделей летно-технических характеристик воздушного судна и стандартных схем полета расстояние, необходимое для набора высоты / снижения до следующей высоты в текущей расчетной точке, оценивается в S 1 . Общее расстояние до цели составляет S , всего . Расстояние, необходимое для того, чтобы аэропорт вылета набрал крейсерскую высоту, составляет S набора высоты , а расстояние, необходимое для крейсерской высоты для снижения до аэропорта назначения, составляет S спуска .Шаг 2: когда текущая расчетная высота точки меньше, чем крейсерская высота, дальность полета превышает определенный порог S м , все еще существует возможность ввода крейсерской высоты. Наша конструкция выглядит следующим образом: когда следующей расчетной точкой с целевой высотой является аэропорт назначения, выберите режим 3; когда следующая расчетная точка с заданной высотой не является аэропортом назначения, а расстояние до следующей точки велико, но при этом остается достаточно дальности для снижения, выберите режим 1; в противном случае выберите Mode 3.Например, when, take, when, take являются регулируемыми коэффициентами, возьмите n 1 > 1 и n 2 > 1. Если, то выберите Mode 1; в противном случае выберите Mode 3. Шаг 3: если условие шага 2 не выполняется и текущая точка находится выше крейсерской высоты или уже пролетела большее расстояние, возможность набора высоты на крейсерскую высоту больше не рассматривается. Когда следующей расчетной точкой с целевой высотой будет аэропорт назначения, выберите Режим 2.Когда расстояние от текущей вычислительной точки до следующей вычислительной точки меньше n 3 s 1 , выберите режим 1. Когда расстояние от текущей вычислительной точки до следующей вычислительной точки больше n 4 s 1 , выберите режим 2; n 3 и n 4 — регулируемые коэффициенты.
5. Численное моделирование и проверка
В соответствии с описанными выше шагами собираются исторические данные маршрута и плана полета Северного Китая за определенный период, а статистика производится в соответствии с парами городов и типами самолетов.Опытная высота, опытная крейсерская высота и опытные данные крейсерской скорости в контрольных точках полета при ограничениях городской пары и типа воздушного судна получаются и передаются в модуль прогнозирования траектории в качестве параметров конфигурации.
Модуль прогнозирования траектории сначала синтезирует такую информацию, как аэропорт вылета, аэропорт посадки и путевая точка, из информации реального плана полета, чтобы сформировать горизонтальную траекторию. Затем, в соответствии со стандартной процедурой полета воздушного судна, запланированной или испытанной крейсерской высотой и крейсерской скоростью воздушного судна, преобразованной высотой и высотой или испытанной высотой контрольной точки, он генерирует профиль высоты и профиль скорости, которые можно разделить на несколько разделов.Вместе с горизонтальным профилем синтезируется 4D траектория самолета.
Взяв в качестве примера рейс B77w из Шэньяна (ZJSY) в аэропорт Пекина (ZBAA), посредством сбора и анализа исторических данных получается эмпирическая информация, как показано в Таблице 1. Следует отметить, что, поскольку данные собираются в Северный Китай, нет эффективных исторических данных, собранных за период до входа в разведывательный регион Северного Китая. Таким образом, эмпирическая ценность, полученная с помощью интеллектуального анализа данных, в основном сосредоточена на точках отчета после входа в разведывательный регион Северного Китая.Кроме того, некоторые путевые точки не получают эффективную информацию о впечатлениях из-за расхождения данных или небольшого количества данных. В этой статье в качестве параметров прогноза используется только эмпирическая информация с высокой степенью агрегирования данных.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Экспериментальная высота каждой отчетной точки используется в качестве целевой высоты, а экспериментальная крейсерская высота и крейсерская скорость используются для замены информации о крейсерской высоте и скорости в план для 4D предсказания траектории.На рисунках 8–10 показано сравнение прогнозируемой траектории и фактической траектории полета A320 из Шэньяна в аэропорт Пекина 26 октября 2019 г. Среди них результат прогнозирования, полученный, когда контрольная высота полета, полученная путем анализа больших данных, не представлена. отображается серым цветом, кривая прогноза, полученная путем введения результата анализа больших данных, показана синим, а фактическая траектория полета, полученная радаром, представлена оранжевым цветом. Из трех графиков видно, что точность прогнозируемого маршрута и реального пути значительно улучшается после добавления эмпирической информации о высоте и скорости, полученной из исторического анализа пути, который показывает, что процесс моделирования и расчета в этой статье является точным.Алгоритм предсказания траектории, основанный на сочетании намерения управления и характеристик воздушного судна, может значительно повысить точность предсказания траектории. Кроме того, результат прогнозирования сектора для каждой путевой точки приведен в таблице 2. На основе повышения точности прогнозирования высоты точность прогнозирования сектора также значительно улучшается. Для систем управления воздушным движением, таких как система управления потоками, оценка пропускной способности, планирование маршрутов и стратегии разрешения конфликтов могут выполняться только диспетчерами на основе знания ожидаемой ситуации пролета над секторами и информационными регионами.Следовательно, метод оптимизации модели прогнозирования трека на основе исторических данных трека имеет большое значение для практического инженерного применения.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||