
Вооружение вкс рф список самолетов: Стальные крылья армии. Из чего состоит военная авиация России — Армия и ОПК
Российские летчики отмечают День ВВС
ПАК ФА (перспективный авиационный комплекс фронтовой авиации) — это истребитель пятого поколения Т-50, оснащенный принципиально новым комплексом авионики и перспективной радиолокационной станцией с фазированной антенной решеткой. Его первый полет состоялся 29 января 2010 года в Комсомольске-на-Амуре, первый публичный показ — 17 августа 2011 года на международном авиационно-космическом салоне МАКС-2011 в подмосковном Жуковском.«Машина на самом деле прекрасная — по пилотажным, навигационным и другим характеристикам, она обнаруживает другие самолеты на очень большом удалении, ей нет в этом равных. Нам есть чем гордиться, и мы рады, что такая машина к нам придет», — сказал главком ВКС России Виктор Бондарев.
По словам заместителя министра обороны РФ Юрия Борисова, серийные поставки ПАК ФА в ВВС России начнутся в 2018 году, хотя ранее начать их планировалось в 2016-2017 годах.
Как заявил заместитель генерального конструктора Объединенной двигателестроительной корпорации (ОДК) Виктор Белоусов, первые опытные образцы штатного двигателя «второго этапа» ПАК ФА будут изготовлены к 2017 году, первые испытания пройдут в 2018 году.
«Пока рано говорить о создании первого опытного образца двигателя второго этапа, пока готовы лишь двигатели-демонстраторы, на основе которых будет создан этот опытный образец («изделие 30″). Думаю, что сам опытный образец будет готов к 2017 году, и, соответственно, первые полеты с ним пройдут в 2018 году», — сказал Белоусов.
ПАК ФА планируется вооружить в том числе модернизированной авиационной ракетой ближнего боя на базе Р-73. Об этом сообщил РИА Новости генеральный директор авиационного предприятия «Дукс» (разработчик ракеты) Юрий Клишин.
По его словам, у новой ракеты будут расширены возможности диапазона пуска, по углу атаки, по перегрузкам, захвату головки наведения, увеличена защищенность от различного рода ловушек, повышены надежность, автономность, универсальность.
На сегодняшний день Р-73 —самая пускаемая и надежная ракета класса «воздух-воздух» в ВВС России. Она способна поражать цели на высоте от 5 метров до 20 километров, движущиеся со скоростью до 2,5 тысячи километров в час.
Хотя истребитель пятого поколения Т-50 еще не выпускается серийно, по данным открытых источников, в России уже идут работы по созданию боевого самолета шестого поколения. Он будет гиперзвуковым, одноместным, невидимым для противника, сверхманевренным, многофункциональным, выполненным из композитных материалов. Самолет будет иметь кабину, но при этом сможет летать как с пилотом в ней, так и без него, то есть объединит в себе и пилотируемый, и беспилотный вариант. Первый полет опытного образца истребителя шестого поколения планируется в период до 2025 года.
Система радиоэлектронной борьбы (РЭБ), создаваемая Концерном «Радиоэлектронные технологии» (КРЭТ) для истребителя шестого поколения, позволит создать полностью автоматизированный бортовой комплекс обороны, сообщили РИА Новости в пресс-службе КРЭТ.
«В концерне создадут специальную систему РЭБ для боевого самолета шестого поколения. В новом образце этого средства будет достигнута практически полная автоматизация всего процесса работы бортового комплекса обороны, при интеграции антенных систем и приборных блоков с основным бортовым радиоэлектронным оборудованием летательного аппарата», — отметил представитель концерна.
Сухие универсалы
ВКС России получают новейшие истребители
Невзирая на технологическое напряжение, вызванное пандемией коронавируса, оборонно-промышленный комплекс России планово выводит в серийное производство истребитель пятого поколения Су-57
Российская Федерация занимает лишь четвертое место в мире по расходам на оборону. Однако успехи российского ОПК впечатляют — впервые в истории Россия в области новейших вооружений обогнала все страны мира, включая США. И на достигнутом не останавливается.
Однако успехи российского ОПК впечатляют — впервые в истории Россия в области новейших вооружений обогнала все страны мира, включая США. И на достигнутом не останавливается.
Курирующий оборонную промышленность РФ вице-премьер Юрий Борисов 21 мая заявил в интервью РИА Новости: «В ходе испытаний Су-57 подтвердил практически все требования тактико-технического задания в полном объеме. Госконтракт на поставку 76 самолетов для оснащения трех авиационных полков Воздушно-космических сил выполняется в соответствии с графиком поставки».
Замечу, истребительный авиаполк по боевой мощи сопоставим с общевойсковой дивизией. Три новых полка — это очень серьезное усиление ВКС России.
Борисов считает, что, несмотря на форс-мажорную ситуацию из-за COVID-19, первая (установочная) партия истребителей пятого поколения Су-57 будет передана Вооруженным силам РФ в 2020 году. Аналогичную информацию о ритме серийных поставок ранее сообщил и глава госкорпорации Ростех Сергей Чемезов.
На первом этапе Воздушно-космические силы России получат самолеты с двигателями четвертого поколения, поставки с силовыми установками пятого поколения – с повышенной топливной эффективностью и меньшей стоимостью жизненного цикла – начнутся в середине 2020-х. Но и нынешние двигатели во многом превосходят зарубежные аналоги.
В ходе испытаний многократно и в разных режимах, включая беспилотный, проверена работа всех систем и двигателей новейшего истребителя. Минобороны РФ неоднократно заявляло, что Су-57 успешно прошел испытания в боевых условиях в Сирийской Арабской Республике. Иначе и быть не могло, ведь российский истребитель пятого поколения предназначен для эффективного уничтожения всех видов воздушных, наземных и надводных целей. Сочетание мощного вооружения, передовых систем обнаружения противника, сверхзвуковой крейсерской скорости и высокой маневренности, малой заметности – обеспечивают Су-57 абсолютное превосходство в воздухе.
Небывалые возможности
Три авиаполка Су-57 – это качественный скачок в развитии боевых возможностей ВКС России. Новейший истребитель способен обнаруживать воздушные и наземные цели на дальности до 400 километров, сопровождать до 62 объектов (и передавать целеуказания другим самолетам (ударным беспилотникам).
Превосходство «Сухого» над американскими истребителями пятого поколения обеспечивают: малозаметность на сверхзвуковой крейсерской скорости (чего нет у F-35 и F-22), выдающиеся пилотажные качества, основная радиолокационная станция, уникальные оптико-электронная система обнаружения целей и система постановки электронных помех (умная обшивка), 10-тонный оружейный арсенал на борту (включая гиперзвуковые ракеты). Весь боезапас истребителя находится во внутренних отсеках, то есть не «светится» на радарах противника.Два турбореактивных двигателя позволяют Су-57 развивать скорость до 2600 километров в час и скорость набора высоты – 21 километр в минуту. Российский истребитель пятого поколения переходит на сверхзвуковую скорость, не включая форсаж, и способен наносить удары не только ракетами малой, средней, большой дальности, но и вести сверхманевренный ближний бой с применением пушечного вооружения (это качество очень ценят летчики). Трехмерная система отклонения вектора тяги двигателей обеспечивает самолету сверхманевренность.
 youtube.com/embed/eqgrv2kHQHA» frameborder=»0″/>
youtube.com/embed/eqgrv2kHQHA» frameborder=»0″/>
Можно лишь предполагать, насколько возрастут боевые возможности 76 заказанных Российской армией тяжелых истребителей Су-57, если они будут выполнять задачи в интеграции с новейшим БПЛА «Охотник». При взаимодействии с истребителем 5-го поколения ударный беспилотник-невидимка может стать прорывом в области боевого применения истребительной авиации. Здесь открывается огромный простор для эффективного взаимодействия летчика и боевого робота.
Информация об отработке беспилотного режима на самом Су-57 – крайне интересна и означает, что сложнейшая машина может управляться искусственным интеллектом (или оператором) на больших расстояниях от базы. Это снимает физиологические ограничения по скорости и маневру (перегрузки перестанут играть роль в тактике боевого применения).
Неслучайно в США с беспокойством следят за развитием в РФ беспилотной (беспредельной) модификации истребителя пятого поколения, ведь американские новейшие F-35 Lightning II могут развалиться примерно через две минуты полета на сверхзвуковых скоростях – обшивка не выдерживает.
Военно-политическая турбулентность
Открытые характеристики и возможности тяжелого истребителя Су-57 – лишь «верхушка айсберга». Воздушная разведка и контроль, координация действий других родов войск, высокоточные ракетные удары широкого спектра дальности – «Сухому» пятого поколения все по силам. Однако боевое превосходство – не самоцель.
Эффективность новейшего авиационного комплекса имеет огромное (принципиальное) значение для обеспечения военной безопасности России и ее союзников – для предотвращения внешней агрессии. Немаловажно и сохранение технологического прогресса в авиационной промышленности, лидирующих позиций РФ на мировом рынке вооружений.

Опыт военных конфликтов последних десятилетий в Афганистане, Ираке, Сирии, Ливии, Югославии показывает, что главным инструментом, или «дубиной», Запада является количественное и качественное доминирование в воздухе (ударная авиация, крылатые ракеты, беспилотники). В Пентагоне разрабатывают концепцию мгновенного неядерного удара, которая должна предоставить американским вооруженным силам возможность наносить удары по укрепленным и мобильным целям с помощью неядерных боезарядов так, чтобы любой противник США был повержен в течение пары часов.
На этом фоне безусловным государственным приоритетом России становится формирование мощных Воздушно-космических сил и системы ПВО-ПРО. Москва вынуждена реагировать на рост военных угроз по всему периметру безопасности, наращивать боеготовность войск и возможности вооружений, укреплять безопасность союзников.
Модернизированный Ту-160 прибыл на испытания в Жуковский
©Wikimedia.orgОбновленный стратегический бомбардировщик-ракетоносец, оснащенный двигателями НК-32-02 и усовершенствованным бортовым оборудованием, успешно прошел заводские испытания. В 2021 году начнутся государственные испытания модернизированного самолета, тогда же первые Ту-160М поступят в войска.
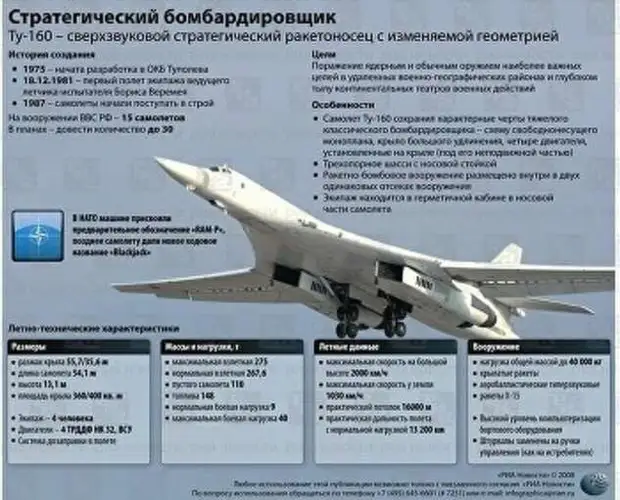
О перелете Ту-160М в Жуковский сообщает РИА Новости. Самолет перелетел с заводского аэродрома Казанского авиазавода им. Горбунова. Модернизированным бомбардировщиком управлял экипаж под руководством заслуженного летчика-испытателя Анри Наскидянца, перелет прошел в штатном режиме, системы и оборудование самолета отработали без замечаний. Ту-160М – модернизированная версия стратегического бомбардировщика-ракетоносца, разработанного конструкторским бюро Туполева в 1970-х годах. Первый полет обновленный самолет совершил 2 февраля 2020 года. Стратегический сверхзвуковой бомбардировщик-ракетоносец Ту-160 с изменяемой геометрией крыла был создан в 1970-1980-х годах. К моменту распада СССР большая часть построенных самолетов этого типа базировалась на Украине, откуда они частично были впоследствии переведены в Россию, а частично утилизированы.
Ту-160М – модернизированная версия стратегического бомбардировщика-ракетоносца, разработанного конструкторским бюро Туполева в 1970-х годах. Первый полет обновленный самолет совершил 2 февраля 2020 года. Стратегический сверхзвуковой бомбардировщик-ракетоносец Ту-160 с изменяемой геометрией крыла был создан в 1970-1980-х годах. К моменту распада СССР большая часть построенных самолетов этого типа базировалась на Украине, откуда они частично были впоследствии переведены в Россию, а частично утилизированы.
Предполагается, что в вариант Ту-160М будут переоборудованы ранее построенные самолеты типа Ту-160. В ноябре 2020 года «Профиль» сообщил о первом полете Ту-160М с новыми двигателями НК-32-02. Помимо двигателей, модернизированный бомбардировщик получил новый бортовой комплекс связи, пилотажно-навигационное оборудование, радиолокационную станцию, а также модернизированную систему управления. Усовершенствования позволили поднять общую эффективность самолета, а его дальность полета за счет более экономичной силовой установки выросла на тысячу километров.
Помимо модернизированных Ту-160М, в 2020-х годах ВКС РФ будут получать самолеты Ту-160М2 новой постройки. Опытный образец нового самолета, построенного с нуля без использования советского технического задела, совершит первый полет в четвертом квартале 2021 года, о чем ранее сообщал «Профиль». В настоящее время на вооружении дальней авиации России состоит 16 самолетов Ту-160, до 2024 года их число должно увеличиться до 24.
Предполагается, что в дальнейшем Россия может увеличить парк Ту-160 до 50 самолетов, которые постепенно заменят в составе Дальней авиации ракетоносцы Ту-95МС. Кроме того, планы обновления ВКС предполагают разработку бомбардировщика нового поколения в рамках проекта ПАК ДА (перспективного авиационного комплекса дальней авиации). Первый полет этого самолета ожидается к середине 2020-х годов, поступление на вооружение – в начале 2030-х. В отличие от Ту-160 он будет дозвуковым, но менее заметным для радаров. Ранее «Профиль» проанализировал ход разработки нового бомбардировщика и его возможные характеристики.
Ранее «Профиль» проанализировал ход разработки нового бомбардировщика и его возможные характеристики.
Представители ВКС России провели рекогносцировку в Белоруссии
Делегация Воздушно-космических сил (ВКС) России провела рекогносцировку в Белоруссии в рамках подготовки к совместным стратегическим учениям «Запад-2021».
«Делегация Воздушно-космических сил Российской Федерации завершила рекогносцировку предстоящего совместного стратегического учения „Запад-2021“», — сообщила сегодня, 2 апреля, пресс-служба Минобороны Белоруссии в своем телеграм-канале.
Отмечается, что российские военные изучили состояние учебно-материальной базы и условия формирования учебно-боевого центра совместной подготовки ВВС и войск ПВО.
«Определены состав сил и средств Российской Федерации, предполагаемых к совместной подготовке на территории Республики Беларусь, порядок совместного обучения на современных образцах вооружения, военной и специальной техники, выполнения учебно-боевых задач», — указали в военном ведомстве.
EADaily ранее сообщало, что совместные российско-белорусские учения «Запад-2021» должны состояться 10—16 сентября на территории Белоруссии и России. Стороны договорились о создании трех совместных учебно-боевых центров, один из которых будет располагаться в Гродненской области. Здесь будет вестись совместная подготовка по линии ВВС и войск ПВО.
Напомним также, что 1 апреля в командном составе Космических войск ВКС России указом президента РФ Владимира Путина состоялись новые назначения. Командующий Космическими войсками — заместитель главнокомандующего ВКС РФ генерал-полковник Александр Головко представил руководящему составу Космических войск ВКС нового начальника штаба — первого заместителя командующего 15-й армией ВКС особого назначения полковника Андрея Ревенка, который ранее занимал должность начальника Главного центра предупреждения о ракетном нападении 15-й армии ВКС (ОсН). Новым начальником Главного центра предупреждения о ракетном нападении стал полковник Сергей Сучков, занимавший до этого должность начальника Главного центра разведки космической обстановки 15-й армии ВКС (ОсН). На должность начальника Главного центра разведки космической обстановки назначен полковник Антон Оголев, проходивший до этого службу в должности заместителя начальника штаба 15-й армии ВКС (ОсН).
Новым начальником Главного центра предупреждения о ракетном нападении стал полковник Сергей Сучков, занимавший до этого должность начальника Главного центра разведки космической обстановки 15-й армии ВКС (ОсН). На должность начальника Главного центра разведки космической обстановки назначен полковник Антон Оголев, проходивший до этого службу в должности заместителя начальника штаба 15-й армии ВКС (ОсН).
Военная авиация России переживает эпоху возрождения
Денис Мантуров возвестил о начале долгожданного серийногопроизводства Су-57
В полете Ту-160 с сопровождением. Фото Павла Аджигильдяева
Российская военная авиация отмечает 12 августа 107‑ю годовщину с момента создания Воздухоплавательной части Генерального штаба. В соответствии с указом президента РФ № 949 от 29 августа 1997 года «Об установлении Дня Военно‑воздушных сил» эта дата считается днем образования российских ВВС. В настоящее время Военно‑воздушные силы являются частью ВКС РФ и включают в себя боевые структуры, службу метеорологов, формирования войск РЭБ, связи и управления, инженерные части, тыловые службы с силами обеспечения, центры боевой подготовки и учебные заведения. Все данные, которые указаны в статье, взяты из открытых источников – они приблизительны и не составляют военной тайны.
Современные ВВС включают в себя пять командований, четыре расположены в Санкт‑Петербурге, Ростове‑на‑Дону, Хабаровске, Новосибирске и еще одно – отдельное командование, в ведении которого находятся дальняя и военно‑транспортная авиации. В состав боевых структур ВВС России входят стратегическая и дальняя авиация, военно‑транспортная и фронтовая авиация, последняя делится на истребительную, штурмовую, бомбардировочную и разведывательную. Кроме того, есть еще и армейская авиация. Всего на первую половину 2019 года парк ВВС РФ насчитывает около 1600 самолетов и более 1400 вертолетов.
В составе стратегической авиации 16 единиц Ту‑160 и около 30 «Медведей» Ту‑95МС. Дальняя авиация располагает полусотней бомбардировщиков Ту‑22М, и еще около 100 таких машин находится на хранении. Данная машина модернизируется, ее новая версия Ту‑22М3М, вероятно, будет частью программы гиперзвукового оружия «Кинжал». Основу истребительной авиации составляют Су‑27 (их примерно 360), МиГ-29 (этих машин в составе ВВС – 225 единиц) и Миг‑31 (их насчитывается 140 штук). Как известно, 31‑й сейчас проходит модернизацию, часть данных самолетов планируется использовать в качестве носителей гиперзвуковых ракетных комплексов «Кинжал». В строю остаются 111 единиц фронтовых бомбардировщиков Су-24 и около 200 штурмовиков Су‑25 «Грач» (еще около 100 этих машин находятся на хранении). Из машин поколения 4+ в парке военной авиации состоят 80 единиц Су‑30 и 48 единиц сверхманевренных Су‑35, а также 75 фронтовых бомбардировщиков Су‑34 «Утенок».
Парк старой техники армейской авиации насчитывает 620 легендарных боевых машин Ми‑24 и примерно 570 ударно‑транспортных геликоптеров Ми‑8. Новых машин не так много, около 100 Ка‑52 и примерно столько же Ми‑28. Поступают на вооружение Ми‑35 (новая версия Ми‑24). Кроме указанных типов машин в парке морской и армейской авиации, а также ВТА находятся Ка‑50, Ка‑226, Ка‑25, Ми‑26, «Ансат».В парке ВТА состоят Ил‑75МД, Ан‑22, Ан‑26, Ан‑124 и другие модели самолетов. В качестве учебных машин используются Як‑130Ю, Ту‑134УБЛ, чешский L‑39 Albatros и учебно‑боевые версии других самолетов.
Считается, что с распадом СССР была безвозвратно потеряна значительная часть парка боевых самолетов. В действительности ВВС Страны Советов всего насчитывали около 15 тыс. боевых самолетов различного назначения. Но большая доля от этого количества машин состовляли устаревшие модели. Если верить открытым источникам, в конце 80‑х парк самолетов 4‑го поколения ВВС был не таким уж многочисленным. На вооружении советских войск к 1990 году стояло 435 стратегических и дальних бомбардировщиков, из них 18 ракетоносцев Ту‑160, а также 160 единиц видавших виды Ту‑95, более 30 старичков М‑4, около 150 дальних бомбардировщиков Ту‑22 и еще восемь десятков Ту‑16. Парк истребителей ВВС СССР насчитывал 1755 машин. Если посмотреть на долю самолетов 4-го поколения, получится, что кроме указанных Ту‑160 советская военная авиация располагала примерно 430 единицами Ту‑22М, фронтовых бомбардировщиков Су‑24 числилось аж 1200 штук, штурмовиков Су‑25 насчитывалось 415 единиц, фронтовых истребителей Су‑27 около 500 единиц, истребителей МиГ‑29 – под девять сотен, а перехватчиков МиГ‑31 – около 400. По сути, российская авиация в результате ликвидации войск былой эпохи в основном очистилась от старья. Беда в другом – с распадом СССР и блока социалистических государств развалилась кооперация в военной промышленности, хорошо отлаженная в советское время. Поэтому обновлять парк летательных аппаратов стало проблематично. Более того, оборонные предприятия и конструкторские бюро внутри России подверглись разрушительному воздействию ельцинской эпохи. В 90‑е практически не велось никаких разработок, многие уникальные идеи (советское конструкторское наследие) зачастую за бесценок продавались заморским дельцам. Возрождение полноценной работы легендарных отечественных КБ произошло лишь во втором десятилетии текущего века. Традиционным стало для России и затягивание внедрения своих же новых разработок во времени.
Парк истребителей ВВС СССР насчитывал 1755 машин. Если посмотреть на долю самолетов 4-го поколения, получится, что кроме указанных Ту‑160 советская военная авиация располагала примерно 430 единицами Ту‑22М, фронтовых бомбардировщиков Су‑24 числилось аж 1200 штук, штурмовиков Су‑25 насчитывалось 415 единиц, фронтовых истребителей Су‑27 около 500 единиц, истребителей МиГ‑29 – под девять сотен, а перехватчиков МиГ‑31 – около 400. По сути, российская авиация в результате ликвидации войск былой эпохи в основном очистилась от старья. Беда в другом – с распадом СССР и блока социалистических государств развалилась кооперация в военной промышленности, хорошо отлаженная в советское время. Поэтому обновлять парк летательных аппаратов стало проблематично. Более того, оборонные предприятия и конструкторские бюро внутри России подверглись разрушительному воздействию ельцинской эпохи. В 90‑е практически не велось никаких разработок, многие уникальные идеи (советское конструкторское наследие) зачастую за бесценок продавались заморским дельцам. Возрождение полноценной работы легендарных отечественных КБ произошло лишь во втором десятилетии текущего века. Традиционным стало для России и затягивание внедрения своих же новых разработок во времени.
ВВС российские, затем советские и снова российские за время существования участвовали в двух мировых войнах и военных кампаниях меньшего масштаба. Боевой опыт, который российские пилоты получили в Сирии, нельзя считать полноценным. Там действия велись и ведутся в условиях отсутствия у противника авиации вообще. Большую ценность для осознания тактики реального боя нашими пилотами и командирами явили краткосрочная война против грузинской армии в августе 2008 года. Бесспорно, военное руководство страны не может полагать, что все вооруженные конфликты в перспективе будут носить только гибридный характер, где противник всегда заведомо слаб и не может применять авиацию против более сильной в технологическом плане стороны. Подготовка к войне всеми ведущими военными державами против равнозначного или более сильного противника, конечно же, ведется, но исключительно в учебном режиме.
Подготовка к войне всеми ведущими военными державами против равнозначного или более сильного противника, конечно же, ведется, но исключительно в учебном режиме.
Как позитивную новость стоит отметить, что началось долгожданное серийное производство многофункционального истребителя 5-го поколения Су‑57. Во всяком случае, глава Минпромторга Денис Мантуров побожился, что это именно так. Поверим ему на слово. Речь идет о 76 машинах, на которых будут установлены двигатели второго этапа. Сравнивать это пока еще не воплощенное в железо число с количеством уже произведенных F‑22 и тем более F‑35 никто не собирается. Но есть надежда, что мы станем свидетелями боевого опробования серийного российского самолета-невидимки, скажем в Сирии. А пока в создании крылатой машины нового поколения Россия пропустила вперед не только США, но и Китай.
России должны почти $23 млрд. Всемирный банк впервые обнародовал данные по странам-кредиторам
Москва оказалась на пятом месте в списке крупнейших кредиторов в мире. Больше всех России должны Белоруссия, Бангладеш, Венесуэла, Индия, Вьетнам и Йемен
Фото: depositphotos.comОбновлено в 13:30
России должны около 23 млрд долларов. Об этом сообщает Всемирный банк, который впервые обнародовал данные по странам-кредиторам и их должникам. Информация предоставлена за 2019 год.
Крупнейший кредитор в мире — Китай, он выдал другим странам займов почти на 150 млрд долларов. Далее следуют Япония, Германия и Франция. Россия в рейтинге на пятом месте.
Крупнейший должник России — Белоруссия. По итогам 2019 года Минск был должен Москве более 8 млрд долларов. Но с тех пор Белоруссии был обещан еще 1 млрд.
Далее в списке тех, кто должен России, идут Бангладеш, Венесуэла, Индия, Вьетнам и Йемен, каждая из этих стран заняла более 1 млрд. Однако Бангладеш получил от России экспортный кредит на постройку атомной электростанции, то есть не в виде живых денег, а в счет оплаты поставок и услуг российских экспортеров, писало ранее РБК.
За Афганистаном, Сербией, Украиной и Сирией числятся долги перед Россией от полумиллиарда до миллиарда долларов. Сумма долга Афганистана не меняется в течение последних 12 лет, Сирии — последних десяти.
Что касается Украины, то Киев учитывает только долг в 600 млн за поставки российского газа в начале 1990-х годов, в то время как Москва считает, что Украина должна ей более 3 млрд по спорным еврооблигациям.
У африканских стран кроме кредитов, выданных во времена СССР, есть и новые российские, в частности у Замбии и Мозамбика.
Почему Россия дает в долг тем странам, которые фактически не смогут его вернуть? Такой вопрос довольно часто становится предметом политических манипуляций в обществе, говорит руководитель Центра политэкономических исследований Института нового общества Василий Колташов.
— Мы видим крупные суммы, и это создает возможность для политической спекуляции: смотрите, нам не хватает денег, а мы Замбии, Мадагаскару, Венесуэле раздаем эти деньги. На самом деле это смешение твердого с холодным. Если Россия сейчас предоставляет кредит, это носит очень важное политическое значение, потому что это часто обеспечивает закупку российских вооружений, что очень важно с точки зрения поддержания некоего баланса сил в мире. Что касается возврата этих денег, то вполне возможен товарный возврат: кофе, какие-то продукты, которые эти страны производят. Возможна форма создания каких-то баз, совместных предприятий. Есть разные механизмы возврата этого долга. Нужно помнить, что это в сложной форме обеспечивает и престиж России, и возможности осуществлять постоянные поставки на какие-то рынки или препятствовать захвату этих стран и их подчинению американским государствам. Если говорить об Африке, к примеру, то сильные позиции РФ в Африке оборачиваются более сильными позициями России в ЕС, потому что бывшие европейские колонизаторы смотрят на Москву и понимают, что если они хотят разговаривать с бывшими колониями (а им очень хочется с ними разговаривать, потому что у них есть экономические интересы в этих зонах), то они должны с особенным уважением относиться к российскому государству, считаться с его политикой и его экономическими интересами в Европе. В данном случае я говорю про поставки газа.
В данном случае я говорю про поставки газа.
— Белоруссия — самый большой наш должник. Понятно, что вопрос все-таки политический, но такой кредит тоже окупается?
— С Белоруссией кредит окупается только теперь, наверное. После того как в Белоруссии возник в 2020 году тяжелейший политический кризис и его временное притушение и будущее разрешение оказалось связано с сотрудничеством с Россией. Но еще недавно, в середине 2020 года, мы наблюдали безобразные метания белорусского руководства.
Россия продолжит предоставлять кредиты другим странам, заявил пресс-секретарь президента Дмитрий Песков. «В рамках двусторонних отношений со многими государствами Россия предоставляет кредиты. Это обычная мировая практика. Это является неотъемлемой частью тесного торгово-экономического и инвестиционного сотрудничества», — сказал Песков журналистам. По его словам, существуют определенные правила по обслуживанию долгов и правила, которые регулируют продолжение кредитования в соответствии с уровнем закредитованности той или иной страны.
Минфин России информацию о кредитах, выданных другим странам, не публикует. Программа госкредитов ежегодно описывается секретными приложениями к федеральному бюджету, отмечает РБК.
Добавить BFM.ru в ваши источники новостей?
По требованию военных снижена масса самолета Ил-112В
+ A —
Доработанный транспортник совершил в Воронеже первый полет
В Воронеже начался новый этап летных испытаний легкого военно-транспортного самолета Ил-112В. После первого полета прошло ровно два года. Перерыв в тестах связан с тем, что авиастроителям пришлось доработать самолет по требованию главного заказчика — Минобороны России. Оказалось, что сделанный самолет не соответствовал заказанной характеристике грузоподъемности — 5 тонн. И вот доработанный самолет 30 марта выполнил первый полет.
Разработка Ил-112 для нужд военных тянется с перерывами с 90-х годов. 10 лет назад его обошел по характеристикам украинский аналог — турбовинтовой Ан-140, и разработку Ил-112В прекратили. Но после того, как в 2014 году, после крымских событий, Киев разорвал все военно-технические связи с Россией, проект Ил-112В был срочно реанимирован.
Дело в том, что этот самолет должен будет заменить древние Ан-24 и Ан-26, разработанные более 50 лет назад. До сих пор российские ВКС имеют в своем составе немало этих самолетов, ресурс которых уже на исходе.
Проект Ил-112В получил дополнительные ресурсы по программе импортозамещения, а также административный пинок. Тем не менее, его разработка сильно тормозилась. По оценке экспертов, КБ Ильюшина не хватало для его реализации достаточного количества кадров.
Срок первого вылета из года в год переносили. Наконец, в марте 2019 года самолет взлетел. Но тут выяснилось, что его конструкция сильно перетяжелена, и самолет не может взять на борт положенные ему 5 тонн грузов. Минобороны поставило авиастроителям «неуд» и приказало доработать самолет, чтобы не попасть на многомиллионные штрафы.
Позже ЦАГИ сообщило, за счет чего было решено облегчить конструкцию самолета. В частности, более легкими сделали мотогондолы, а также обтекатели ниши для убираемого шасси.
Как сообщили 30 марта авиастроители, полет продолжался 30 минут. Самолет пилотировали шеф-пилота фирмы «Ильюшин», летчик-испытатель 1-го класса, Герой России Николай Куимов, летчик-испытатель 1-го класса Дмитрий Комаров, бортинженер-испытатель 1-го класса Николай Хлудеев.
В полете проверили работу двигателей, устойчивость и управляемость, основные системы.
По информации компании «Ильюшин», планируется в год выпускать по 12 Ил-112В. Однако вряд ли такой темп устроит военных. Иначе на замену парка Ан-24 и Ан-26 потребуются десятилетия. Ил-112В может служить для транспортировки и воздушного десантирования бойцов ВДВ, вооружения и легкой техники, грузов общей массой 5 тонн. В грузовую кабину помещается автомобиль УАЗ-452
В грузовую кабину помещается автомобиль УАЗ-452
Самолет сможет взлетать и садиться на необорудованные аэродромы и грунтовые полосы. Крейсерская скорость — 470 км/ч. Дальность полета с максимальной нагрузкой — 1200 км.
Congress.gov | Библиотека Конгресса
Секция записи Конгресса Ежедневный дайджест Сенат дом Расширения замечаний
Замечания участников
Автор: Any House Member Адамс, Альма С.[D-NC] Адерхольт, Роберт Б. [R-AL] Агилар, Пит [D-CA] Аллен, Рик У. [R-GA] Оллред, Колин З. [D-TX] Амодеи, Марк Э. [R -NV] Армстронг, Келли [R-ND] Аррингтон, Джоди К. [R-TX] Auchincloss, Jake [D-MA] Axne, Cynthia [D-IA] Бабин, Брайан [R-TX] Бэкон, Дон [R -NE] Бэрд, Джеймс Р. [R-IN] Балдерсон, Трой [R-OH] Бэнкс, Джим [R-IN] Барр, Энди [R-KY] Барраган, Нанетт Диас [D-CA] Басс, Карен [ D-CA] Битти, Джойс [D-OH] Бенц, Клифф [R-OR] Бера, Ами [D-CA] Бергман, Джек [R-MI] Бейер, Дональд С., младший [D-VA] Байс , Стефани И. [R-OK] Биггс, Энди [R-AZ] Билиракис, Гас М.[R-FL] Бишоп, Дэн [R-NC] Бишоп, Сэнфорд Д., младший [D-GA] Блуменауэр, Эрл [D-OR] Блант Рочестер, Лиза [D-DE] Боберт, Лорен [R-CO ] Бонамичи, Сюзанна [D-OR] Бост, Майк [R-IL] Bourdeaux, Carolyn [D-GA] Bowman, Jamaal [D-NY] Бойл, Брендан Ф. [D-PA] Брэди, Кевин [R-TX ] Брукс, Мо [R-AL] Браун, Энтони Г. [D-MD] Браунли, Джулия [D-CA] Бьюкенен, Верн [R-FL] Бак, Кен [R-CO] Бакшон, Ларри [R-IN ] Бадд, Тед [R-NC] Берчетт, Тим [R-TN] Берджесс, Майкл С. [R-TX] Буш, Кори [D-MO] Бустос, Cheri [D-IL] Баттерфилд, GK [D-NC ] Калверт, Кен [R-CA] Каммак, Кэт [R-FL] Карбаджал, Салуд О. [D-CA] Карденас, Тони [D-CA] Карл, Джерри Л. [R-AL] Карсон, Андре [D-IN] Картер, Эрл Л. «Бадди» [R-GA] Картер, Джон Р. [ R-TX] Картрайт, Мэтт [D-PA] Кейс, Эд [D-HI] Кастен, Шон [D-IL] Кастор, Кэти [D-FL] Кастро, Хоакин [D-TX] Cawthorn, Мэдисон [R- NC] Шабо, Стив [R-OH] Чейни, Лиз [R-WY] Чу, Джуди [D-CA] Cicilline, Дэвид Н. [D-RI] Кларк, Кэтрин М. [D-MA] Кларк, Иветт Д. . [D-NY] Кливер, Эмануэль [D-MO] Клайн, Бен [R-VA] Клауд, Майкл [R-TX] Клайберн, Джеймс Э. [D-SC] Клайд, Эндрю С. [R-GA] Коэн, Стив [D-TN] Коул, Том [R-OK] Комер, Джеймс [R-KY] Коннолли, Джеральд Э.[D-VA] Купер, Джим [D-TN] Корреа, Дж. Луис [D-CA] Коста, Джим [D-CA] Кортни, Джо [D-CT] Крейг, Энджи [D-MN] Кроуфорд, Эрик А. «Рик» [R-AR] Креншоу, Дэн [R-TX] Крист, Чарли [D-FL] Кроу, Джейсон [D-CO] Куэльяр, Генри [D-TX] Кертис, Джон Р. [R- UT] Дэвидс, Шарис [D-KS] Дэвидсон, Уоррен [R-OH] Дэвис, Дэнни К. [D-IL] Дэвис, Родни [R-IL] Дин, Мадлен [D-PA] ДеФазио, Питер А. [ D-OR] DeGette, Diana [D-CO] DeLauro, Rosa L. [D-CT] DelBene, Suzan K. [D-WA] Delgado, Antonio [D-NY] Demings, Val Butler [D-FL] DeSaulnier , Марк [D-CA] ДеДжарле, Скотт [R-TN] Дойч, Теодор Э.[D-FL] Диас-Баларт, Марио [R-FL] Дингелл, Дебби [D-MI] Доггетт, Ллойд [D-TX] Дональдс, Байрон [R-FL] Дойл, Майкл Ф. [D-PA] Дункан , Джефф [R-SC] Данн, Нил П. [R-FL] Эммер, Том [R-MN] Эскобар, Вероника [D-TX] Эшу, Анна Г. [D-CA] Эспайлат, Адриано [D-NY ] Эстес, Рон [R-KS] Эванс, Дуайт [D-PA] Фаллон, Пэт [R-TX] Feenstra, Рэнди [R-IA] Фергюсон, А. Дрю, IV [R-GA] Фишбах, Мишель [R -MN] Фицджеральд, Скотт [R-WI] Фитцпатрик, Брайан К. [R-PA] Флейшманн, Чарльз Дж. «Чак» [R-TN] Флетчер, Лиззи [D-TX] Фортенберри, Джефф [R-NE] Фостер, Билл [D-IL] Фокс, Вирджиния [R-NC] Франкель, Лоис [D-FL] Франклин, К.Скотт [R-FL] Фадж, Марсия Л. [D-OH] Фулчер, Расс [R-ID] Gaetz, Мэтт [R-FL] Галлахер, Майк [R-WI] Галлего, Рубен [D-AZ] Гараменди, Джон [D-CA] Гарбарино, Эндрю Р. [R-NY] Гарсия, Хесус Дж. «Чуй» [D-IL] Гарсия, Майк [R-CA] Гарсия, Сильвия Р. [D-TX] Гиббс, Боб [R-OH] Хименес, Карлос А.
[D-CA] Карденас, Тони [D-CA] Карл, Джерри Л. [R-AL] Карсон, Андре [D-IN] Картер, Эрл Л. «Бадди» [R-GA] Картер, Джон Р. [ R-TX] Картрайт, Мэтт [D-PA] Кейс, Эд [D-HI] Кастен, Шон [D-IL] Кастор, Кэти [D-FL] Кастро, Хоакин [D-TX] Cawthorn, Мэдисон [R- NC] Шабо, Стив [R-OH] Чейни, Лиз [R-WY] Чу, Джуди [D-CA] Cicilline, Дэвид Н. [D-RI] Кларк, Кэтрин М. [D-MA] Кларк, Иветт Д. . [D-NY] Кливер, Эмануэль [D-MO] Клайн, Бен [R-VA] Клауд, Майкл [R-TX] Клайберн, Джеймс Э. [D-SC] Клайд, Эндрю С. [R-GA] Коэн, Стив [D-TN] Коул, Том [R-OK] Комер, Джеймс [R-KY] Коннолли, Джеральд Э.[D-VA] Купер, Джим [D-TN] Корреа, Дж. Луис [D-CA] Коста, Джим [D-CA] Кортни, Джо [D-CT] Крейг, Энджи [D-MN] Кроуфорд, Эрик А. «Рик» [R-AR] Креншоу, Дэн [R-TX] Крист, Чарли [D-FL] Кроу, Джейсон [D-CO] Куэльяр, Генри [D-TX] Кертис, Джон Р. [R- UT] Дэвидс, Шарис [D-KS] Дэвидсон, Уоррен [R-OH] Дэвис, Дэнни К. [D-IL] Дэвис, Родни [R-IL] Дин, Мадлен [D-PA] ДеФазио, Питер А. [ D-OR] DeGette, Diana [D-CO] DeLauro, Rosa L. [D-CT] DelBene, Suzan K. [D-WA] Delgado, Antonio [D-NY] Demings, Val Butler [D-FL] DeSaulnier , Марк [D-CA] ДеДжарле, Скотт [R-TN] Дойч, Теодор Э.[D-FL] Диас-Баларт, Марио [R-FL] Дингелл, Дебби [D-MI] Доггетт, Ллойд [D-TX] Дональдс, Байрон [R-FL] Дойл, Майкл Ф. [D-PA] Дункан , Джефф [R-SC] Данн, Нил П. [R-FL] Эммер, Том [R-MN] Эскобар, Вероника [D-TX] Эшу, Анна Г. [D-CA] Эспайлат, Адриано [D-NY ] Эстес, Рон [R-KS] Эванс, Дуайт [D-PA] Фаллон, Пэт [R-TX] Feenstra, Рэнди [R-IA] Фергюсон, А. Дрю, IV [R-GA] Фишбах, Мишель [R -MN] Фицджеральд, Скотт [R-WI] Фитцпатрик, Брайан К. [R-PA] Флейшманн, Чарльз Дж. «Чак» [R-TN] Флетчер, Лиззи [D-TX] Фортенберри, Джефф [R-NE] Фостер, Билл [D-IL] Фокс, Вирджиния [R-NC] Франкель, Лоис [D-FL] Франклин, К.Скотт [R-FL] Фадж, Марсия Л. [D-OH] Фулчер, Расс [R-ID] Gaetz, Мэтт [R-FL] Галлахер, Майк [R-WI] Галлего, Рубен [D-AZ] Гараменди, Джон [D-CA] Гарбарино, Эндрю Р. [R-NY] Гарсия, Хесус Дж. «Чуй» [D-IL] Гарсия, Майк [R-CA] Гарсия, Сильвия Р. [D-TX] Гиббс, Боб [R-OH] Хименес, Карлос А. [R-FL] Гомерт, Луи [R-TX] Голден, Джаред Ф. [D-ME] Гомес, Джимми [D-CA] Гонсалес, Тони [R-TX] Гонсалес , Энтони [R-OH] Гонсалес, Висенте [D-TX] Гонсалес-Колон, Дженниффер [R-PR] Гуд, Боб [R-VA] Гуден, Лэнс [R-TX] Госар, Пол А. [R-AZ ] Gottheimer, Джош [D-NJ] Granger, Kay [R-TX] Graves, Garret [R-LA] Graves, Sam [R-MO] Green, Al [D-TX] Green, Mark E.[R-TN] Грин, Марджори Тейлор [R-GA] Гриффит, Х. Морган [R-VA] Гриджалва, Рауль М. [D-AZ] Гротман, Гленн [R-WI] Гость, Майкл [R-MS] Гатри, Бретт [R-KY] Хааланд, Дебра А. [D-NM] Хагедорн, Джим [R-MN] Хардер, Джош [D-CA] Харрис, Энди [R-MD] Харшбаргер, Диана [R-TN] Хартцлер, Вики [R-MO] Гастингс, Элси Л. [D-FL] Хейс, Джахана [D-CT] Херн, Кевин [R-OK] Херрелл, Иветт [R-NM] Эррера Бейтлер, Хайме [R-WA ] Хайс, Джоди Б. [R-GA] Хиггинс, Брайан [D-NY] Хиггинс, Клэй [R-LA] Хилл, Дж. Френч [R-AR] Хаймс, Джеймс А. [D-CT] Хинсон, Эшли [R-IA] Hollingsworth, Trey [R-IN] Horsford, Steven [D-NV] Houlahan, Chrissy [D-PA] Hoyer, Steny H.[D-MD] Хадсон, Ричард [R-NC] Хаффман, Джаред [D-CA] Хьюизенга, Билл [R-MI] Исса, Даррелл Э. [R-CA] Джексон, Ронни [R-TX] Джексон Ли, Шейла [D-TX] Джейкобс, Крис [R-NY] Джейкобс, Сара [D-CA] Jayapal, Pramila [D-WA] Джеффрис, Хаким С. [D-NY] Джонсон, Билл [R-OH] Джонсон, Дасти [R-SD] Джонсон, Эдди Бернис [D-TX] Джонсон, Генри К. «Хэнк» младший [D-GA] Джонсон, Майк [R-LA] Джонс, Mondaire [D-NY] Джордан, Джим [R-OH] Джойс, Дэвид П. [R-OH] Джойс, Джон [R-PA] Кахеле, Кайали [D-HI] Каптур, Марси [D-OH] Катко, Джон [R-NY] Китинг , Уильям Р.[D-MA] Келлер, Фред [R-PA] Келли, Майк [R-PA] Келли, Робин Л. [D-IL] Келли, Трент [R-MS] Кханна, Ро [D-CA] Килди, Дэниел Т. [D-MI] Килмер, Дерек [D-WA] Ким, Энди [D-NJ] Ким, Янг [R-CA] Кинд, Рон [D-WI] Кинзингер, Адам [R-IL] Киркпатрик, Энн [D-AZ] Кришнамурти, Раджа [D-IL] Кустер, Энн М. [D-NH] Кустофф, Дэвид [R-TN] Лахуд, Дарин [R-IL] Ламальфа, Дуг [R-CA] Лэмб, Конор [D-PA] Лэмборн, Дуг [R-CO] Ланжевен, Джеймс Р. [D-RI] Ларсен, Рик [D-WA] Ларсон, Джон Б. [D-CT] Латта, Роберт Э. [R-OH ] Латернер, Джейк [R-KS] Лоуренс, Бренда Л.
[R-FL] Гомерт, Луи [R-TX] Голден, Джаред Ф. [D-ME] Гомес, Джимми [D-CA] Гонсалес, Тони [R-TX] Гонсалес , Энтони [R-OH] Гонсалес, Висенте [D-TX] Гонсалес-Колон, Дженниффер [R-PR] Гуд, Боб [R-VA] Гуден, Лэнс [R-TX] Госар, Пол А. [R-AZ ] Gottheimer, Джош [D-NJ] Granger, Kay [R-TX] Graves, Garret [R-LA] Graves, Sam [R-MO] Green, Al [D-TX] Green, Mark E.[R-TN] Грин, Марджори Тейлор [R-GA] Гриффит, Х. Морган [R-VA] Гриджалва, Рауль М. [D-AZ] Гротман, Гленн [R-WI] Гость, Майкл [R-MS] Гатри, Бретт [R-KY] Хааланд, Дебра А. [D-NM] Хагедорн, Джим [R-MN] Хардер, Джош [D-CA] Харрис, Энди [R-MD] Харшбаргер, Диана [R-TN] Хартцлер, Вики [R-MO] Гастингс, Элси Л. [D-FL] Хейс, Джахана [D-CT] Херн, Кевин [R-OK] Херрелл, Иветт [R-NM] Эррера Бейтлер, Хайме [R-WA ] Хайс, Джоди Б. [R-GA] Хиггинс, Брайан [D-NY] Хиггинс, Клэй [R-LA] Хилл, Дж. Френч [R-AR] Хаймс, Джеймс А. [D-CT] Хинсон, Эшли [R-IA] Hollingsworth, Trey [R-IN] Horsford, Steven [D-NV] Houlahan, Chrissy [D-PA] Hoyer, Steny H.[D-MD] Хадсон, Ричард [R-NC] Хаффман, Джаред [D-CA] Хьюизенга, Билл [R-MI] Исса, Даррелл Э. [R-CA] Джексон, Ронни [R-TX] Джексон Ли, Шейла [D-TX] Джейкобс, Крис [R-NY] Джейкобс, Сара [D-CA] Jayapal, Pramila [D-WA] Джеффрис, Хаким С. [D-NY] Джонсон, Билл [R-OH] Джонсон, Дасти [R-SD] Джонсон, Эдди Бернис [D-TX] Джонсон, Генри К. «Хэнк» младший [D-GA] Джонсон, Майк [R-LA] Джонс, Mondaire [D-NY] Джордан, Джим [R-OH] Джойс, Дэвид П. [R-OH] Джойс, Джон [R-PA] Кахеле, Кайали [D-HI] Каптур, Марси [D-OH] Катко, Джон [R-NY] Китинг , Уильям Р.[D-MA] Келлер, Фред [R-PA] Келли, Майк [R-PA] Келли, Робин Л. [D-IL] Келли, Трент [R-MS] Кханна, Ро [D-CA] Килди, Дэниел Т. [D-MI] Килмер, Дерек [D-WA] Ким, Энди [D-NJ] Ким, Янг [R-CA] Кинд, Рон [D-WI] Кинзингер, Адам [R-IL] Киркпатрик, Энн [D-AZ] Кришнамурти, Раджа [D-IL] Кустер, Энн М. [D-NH] Кустофф, Дэвид [R-TN] Лахуд, Дарин [R-IL] Ламальфа, Дуг [R-CA] Лэмб, Конор [D-PA] Лэмборн, Дуг [R-CO] Ланжевен, Джеймс Р. [D-RI] Ларсен, Рик [D-WA] Ларсон, Джон Б. [D-CT] Латта, Роберт Э. [R-OH ] Латернер, Джейк [R-KS] Лоуренс, Бренда Л. [D-MI] Лоусон, Эл, младший [D-FL] Ли, Барбара [D-CA] Ли, Сьюзи [D-NV] Леже Фернандес, Тереза [D-NM] Леско, Дебби [R-AZ] Левин , Энди [D-MI] Левин, Майк [D-CA] Лью, Тед [D-CA] Лофгрен, Зои [D-CA] Лонг, Билли [R-MO] Лоудермилк, Барри [R-GA] Ловенталь, Алан С. [D-CA] Лукас, Фрэнк Д. [R-OK] Люткемейер, Блейн [R-MO] Лурия, Элейн Г. [D-VA] Линч, Стивен Ф. [D-MA] Мейс, Нэнси [R -SC] Малиновски, Том [D-NJ] Маллиотакис, Николь [R-NY] Мэлони, Кэролин Б. [D-NY] Мэлони, Шон Патрик [D-NY] Манн, Трейси [R-KS] Мэннинг, Кэти Э. .[D-NC] Мэсси, Томас [R-KY] Маст, Брайан Дж. [R-FL] Мацуи, Дорис О. [D-CA] МакБэт, Люси [D-GA] Маккарти, Кевин [R-CA] МакКол , Майкл Т. [R-TX] Макклейн, Лиза К. [R-MI] МакКлинток, Том [R-CA] МакКоллум, Бетти [D-MN] МакИчин, А. Дональд [D-VA] Макговерн, Джеймс П. [D-MA] МакГенри, Патрик Т. [R-NC] МакКинли, Дэвид Б. [R-WV] МакМоррис Роджерс, Кэти [R-WA] Макнерни, Джерри [D-CA] Микс, Грегори В. [D- NY] Мейер, Питер [R-MI] Мэн, Грейс [D-NY] Meuser, Daniel [R-PA] Mfume, Kweisi [D-MD] Миллер, Кэрол Д. [R-WV] Миллер, Мэри Э. [ R-IL] Миллер-Микс, Марианнетт [R-IA] Мооленаар, Джон Р.[R-MI] Муни, Александр X. [R-WV] Мур, Барри [R-AL] Мур, Блейк Д. [R-UT] Мур, Гвен [D-WI] Морелль, Джозеф Д. [D-NY ] Моултон, Сет [D-MA] Мрван, Фрэнк Дж. [D-IN] Маллин, Маркуэйн [R-OK] Мерфи, Грегори [R-NC] Мерфи, Стефани Н. [D-FL] Надлер, Джерролд [D -NY] Наполитано, Грейс Ф. [D-CA] Нил, Ричард Э. [D-MA] Негусе, Джо [D-CO] Нелс, Трой Э. [R-TX] Ньюхаус, Дэн [R-WA] Ньюман , Мари [D-IL] Норкросс, Дональд [D-NJ] Норман, Ральф [R-SC] Нортон, Элеонора Холмс [D-DC] Нуньес, Девин [R-CA] О’Халлеран, Том [D-AZ] Обернолти, Джей [R-CA] Окасио-Кортес, Александрия [D-NY] Омар, Ильхан [D-MN] Оуэнс, Берджесс [R-UT] Палаццо, Стивен М.[R-MS] Паллоне, Фрэнк, младший [D-NJ] Палмер, Гэри Дж. [R-AL] Панетта, Джимми [D-CA] Паппас, Крис [D-NH] Паскрелл, Билл, мл. [D -NJ] Пейн, Дональд М., младший [D-NJ] Пелоси, Нэнси [D-CA] Пенс, Грег [R-IN] Перлмуттер, Эд [D-CO] Перри, Скотт [R-PA] Питерс, Скотт Х. [D-CA] Пфлюгер, Август [R-TX] Филлипс, Дин [D-MN] Пингри, Челли [D-ME] Пласкетт, Стейси Э.
[D-MI] Лоусон, Эл, младший [D-FL] Ли, Барбара [D-CA] Ли, Сьюзи [D-NV] Леже Фернандес, Тереза [D-NM] Леско, Дебби [R-AZ] Левин , Энди [D-MI] Левин, Майк [D-CA] Лью, Тед [D-CA] Лофгрен, Зои [D-CA] Лонг, Билли [R-MO] Лоудермилк, Барри [R-GA] Ловенталь, Алан С. [D-CA] Лукас, Фрэнк Д. [R-OK] Люткемейер, Блейн [R-MO] Лурия, Элейн Г. [D-VA] Линч, Стивен Ф. [D-MA] Мейс, Нэнси [R -SC] Малиновски, Том [D-NJ] Маллиотакис, Николь [R-NY] Мэлони, Кэролин Б. [D-NY] Мэлони, Шон Патрик [D-NY] Манн, Трейси [R-KS] Мэннинг, Кэти Э. .[D-NC] Мэсси, Томас [R-KY] Маст, Брайан Дж. [R-FL] Мацуи, Дорис О. [D-CA] МакБэт, Люси [D-GA] Маккарти, Кевин [R-CA] МакКол , Майкл Т. [R-TX] Макклейн, Лиза К. [R-MI] МакКлинток, Том [R-CA] МакКоллум, Бетти [D-MN] МакИчин, А. Дональд [D-VA] Макговерн, Джеймс П. [D-MA] МакГенри, Патрик Т. [R-NC] МакКинли, Дэвид Б. [R-WV] МакМоррис Роджерс, Кэти [R-WA] Макнерни, Джерри [D-CA] Микс, Грегори В. [D- NY] Мейер, Питер [R-MI] Мэн, Грейс [D-NY] Meuser, Daniel [R-PA] Mfume, Kweisi [D-MD] Миллер, Кэрол Д. [R-WV] Миллер, Мэри Э. [ R-IL] Миллер-Микс, Марианнетт [R-IA] Мооленаар, Джон Р.[R-MI] Муни, Александр X. [R-WV] Мур, Барри [R-AL] Мур, Блейк Д. [R-UT] Мур, Гвен [D-WI] Морелль, Джозеф Д. [D-NY ] Моултон, Сет [D-MA] Мрван, Фрэнк Дж. [D-IN] Маллин, Маркуэйн [R-OK] Мерфи, Грегори [R-NC] Мерфи, Стефани Н. [D-FL] Надлер, Джерролд [D -NY] Наполитано, Грейс Ф. [D-CA] Нил, Ричард Э. [D-MA] Негусе, Джо [D-CO] Нелс, Трой Э. [R-TX] Ньюхаус, Дэн [R-WA] Ньюман , Мари [D-IL] Норкросс, Дональд [D-NJ] Норман, Ральф [R-SC] Нортон, Элеонора Холмс [D-DC] Нуньес, Девин [R-CA] О’Халлеран, Том [D-AZ] Обернолти, Джей [R-CA] Окасио-Кортес, Александрия [D-NY] Омар, Ильхан [D-MN] Оуэнс, Берджесс [R-UT] Палаццо, Стивен М.[R-MS] Паллоне, Фрэнк, младший [D-NJ] Палмер, Гэри Дж. [R-AL] Панетта, Джимми [D-CA] Паппас, Крис [D-NH] Паскрелл, Билл, мл. [D -NJ] Пейн, Дональд М., младший [D-NJ] Пелоси, Нэнси [D-CA] Пенс, Грег [R-IN] Перлмуттер, Эд [D-CO] Перри, Скотт [R-PA] Питерс, Скотт Х. [D-CA] Пфлюгер, Август [R-TX] Филлипс, Дин [D-MN] Пингри, Челли [D-ME] Пласкетт, Стейси Э. [D-VI] Покан, Марк [D-WI] Портер, Кэти [D-CA] Поузи, Билл [R-FL] Прессли, Аянна [D-MA] Прайс, Дэвид Э. [D-NC] Куигли, Майк [D-IL] Радваген, Аумуа Амата Коулман [R- AS] Раскин, Джейми [D-MD] Рид, Том [R-NY] Решенталер, Гай [R-PA] Райс, Кэтлин М.[D-NY] Райс, Том [R-SC] Ричмонд, Седрик Л. [D-LA] Роджерс, Гарольд [R-KY] Роджерс, Майк Д. [R-AL] Роуз, Джон В. [R-TN ] Розендейл старший, Мэтью М. [R-MT] Росс, Дебора К. [D-NC] Роузер, Дэвид [R-NC] Рой, Чип [R-TX] Ройбал-Аллард, Люсиль [D-CA] Руис , Рауль [D-CA] Рупперсбергер, Калифорния Датч [D-MD] Раш, Бобби Л. [D-IL] Резерфорд, Джон Х. [R-FL] Райан, Тим [D-OH] Саблан, Грегорио Килили Камачо [ D-MP] Салазар, Мария Эльвира [R-FL] Санчес, Линда Т. [D-CA] Сан-Николас, Майкл FQ [D-GU] Сарбейнс, Джон П. [D-MD] Скализ, Стив [R-LA ] Скэнлон, Мэри Гей [D-PA] Шаковски, Дженис Д.[D-IL] Шифф, Адам Б. [D-CA] Шнайдер, Брэдли Скотт [D-IL] Шрейдер, Курт [D-OR] Шриер, Ким [D-WA] Швейкерт, Дэвид [R-AZ] Скотт, Остин [R-GA] Скотт, Дэвид [D-GA] Скотт, Роберт С. «Бобби» [D-VA] Сешнс, Пит [R-TX] Сьюэлл, Терри А. [D-AL] Шерман, Брэд [D -CA] Шерилл, Мики [D-NJ] Симпсон, Майкл К. [R-ID] Sires, Альбио [D-NJ] Slotkin, Элисса [D-MI] Смит, Адам [D-WA] Смит, Адриан [R -NE] Смит, Кристофер Х. [R-NJ] Смит, Джейсон [R-MO] Смакер, Ллойд [R-PA] Сото, Даррен [D-FL] Спанбергер, Эбигейл Дэвис [D-VA] Спарц, Виктория [ R-IN] Шпейер, Джеки [D-CA] Стэнтон, Грег [D-AZ] Стаубер, Пит [R-MN] Стил, Мишель [R-CA] Стефаник, Элиза М.[R-NY] Стейл, Брайан [R-WI] Steube, В. Грегори [R-FL] Стивенс, Хейли М. [D-MI] Стюарт, Крис [R-UT] Стиверс, Стив [R-OH] Стрикленд , Мэрилин [D-WA] Суоззи, Томас Р. [D-NY] Swalwell, Эрик [D-CA] Такано, Марк [D-CA] Тейлор, Ван [R-TX] Тенни, Клаудия [R-NY] Томпсон , Бенни Г. [D-MS] Томпсон, Гленн [R-PA] Томпсон, Майк [D-CA] Тиффани, Томас П. [R-WI] Тиммонс, Уильям Р. IV [R-SC] Титус, Дина [ D-NV] Тлаиб, Рашида [D-MI] Тонко, Пол [D-NY] Торрес, Норма Дж. [D-CA] Торрес, Ричи [D-NY] Трахан, Лори [D-MA] Трон, Дэвид Дж. .[D-MD] Тернер, Майкл Р. [R-OH] Андервуд, Лорен [D-IL] Аптон, Фред [R-MI] Валадао, Дэвид Г.
[D-VI] Покан, Марк [D-WI] Портер, Кэти [D-CA] Поузи, Билл [R-FL] Прессли, Аянна [D-MA] Прайс, Дэвид Э. [D-NC] Куигли, Майк [D-IL] Радваген, Аумуа Амата Коулман [R- AS] Раскин, Джейми [D-MD] Рид, Том [R-NY] Решенталер, Гай [R-PA] Райс, Кэтлин М.[D-NY] Райс, Том [R-SC] Ричмонд, Седрик Л. [D-LA] Роджерс, Гарольд [R-KY] Роджерс, Майк Д. [R-AL] Роуз, Джон В. [R-TN ] Розендейл старший, Мэтью М. [R-MT] Росс, Дебора К. [D-NC] Роузер, Дэвид [R-NC] Рой, Чип [R-TX] Ройбал-Аллард, Люсиль [D-CA] Руис , Рауль [D-CA] Рупперсбергер, Калифорния Датч [D-MD] Раш, Бобби Л. [D-IL] Резерфорд, Джон Х. [R-FL] Райан, Тим [D-OH] Саблан, Грегорио Килили Камачо [ D-MP] Салазар, Мария Эльвира [R-FL] Санчес, Линда Т. [D-CA] Сан-Николас, Майкл FQ [D-GU] Сарбейнс, Джон П. [D-MD] Скализ, Стив [R-LA ] Скэнлон, Мэри Гей [D-PA] Шаковски, Дженис Д.[D-IL] Шифф, Адам Б. [D-CA] Шнайдер, Брэдли Скотт [D-IL] Шрейдер, Курт [D-OR] Шриер, Ким [D-WA] Швейкерт, Дэвид [R-AZ] Скотт, Остин [R-GA] Скотт, Дэвид [D-GA] Скотт, Роберт С. «Бобби» [D-VA] Сешнс, Пит [R-TX] Сьюэлл, Терри А. [D-AL] Шерман, Брэд [D -CA] Шерилл, Мики [D-NJ] Симпсон, Майкл К. [R-ID] Sires, Альбио [D-NJ] Slotkin, Элисса [D-MI] Смит, Адам [D-WA] Смит, Адриан [R -NE] Смит, Кристофер Х. [R-NJ] Смит, Джейсон [R-MO] Смакер, Ллойд [R-PA] Сото, Даррен [D-FL] Спанбергер, Эбигейл Дэвис [D-VA] Спарц, Виктория [ R-IN] Шпейер, Джеки [D-CA] Стэнтон, Грег [D-AZ] Стаубер, Пит [R-MN] Стил, Мишель [R-CA] Стефаник, Элиза М.[R-NY] Стейл, Брайан [R-WI] Steube, В. Грегори [R-FL] Стивенс, Хейли М. [D-MI] Стюарт, Крис [R-UT] Стиверс, Стив [R-OH] Стрикленд , Мэрилин [D-WA] Суоззи, Томас Р. [D-NY] Swalwell, Эрик [D-CA] Такано, Марк [D-CA] Тейлор, Ван [R-TX] Тенни, Клаудия [R-NY] Томпсон , Бенни Г. [D-MS] Томпсон, Гленн [R-PA] Томпсон, Майк [D-CA] Тиффани, Томас П. [R-WI] Тиммонс, Уильям Р. IV [R-SC] Титус, Дина [ D-NV] Тлаиб, Рашида [D-MI] Тонко, Пол [D-NY] Торрес, Норма Дж. [D-CA] Торрес, Ричи [D-NY] Трахан, Лори [D-MA] Трон, Дэвид Дж. .[D-MD] Тернер, Майкл Р. [R-OH] Андервуд, Лорен [D-IL] Аптон, Фред [R-MI] Валадао, Дэвид Г. [R-CA] Ван Дрю, Джефферсон [R-NJ] Ван Дайн, Бет [R-Техас] Варгас, Хуан [D-CA] Визи, Марк А. [D-TX] Вела, Филемон [D-TX] Веласкес, Нидия М. [D-Нью-Йорк] Вагнер, Энн [R -MO] Уолберг, Тим [R-MI] Валорски, Джеки [R-IN] Вальс, Майкл [R-FL] Вассерман Шульц, Дебби [D-FL] Уотерс, Максин [D-CA] Уотсон Коулман, Бонни [D -NJ] Вебер, Рэнди К., старший [R-TX] Вебстер, Дэниел [R-FL] Велч, Питер [D-VT] Венструп, Брэд Р. [R-OH] Вестерман, Брюс [R-AR] Векстон, Дженнифер [D-VA] Уайлд, Сьюзан [D-PA] Уильямс, Nikema [D-GA] Уильямс, Роджер [R-TX] Уилсон, Фредерика С.[D-FL] Уилсон, Джо [R-SC] Виттман, Роберт Дж. [R-VA] Womack, Стив [R-AR] Райт, Рон [R-TX] Ярмут, Джон А. [D-KY] Янг , Дон [R-AK] Зельдин, Ли М. [R-NY] Любой член Сената Болдуин, Тэмми [D-WI] Баррассо, Джон [R-WY] Беннет, Майкл Ф. [D-CO] Блэкберн, Марша [ R-TN] Блюменталь, Ричард [D-CT] Блант, Рой [R-MO] Букер, Кори А. [D-NJ] Бузман, Джон [R-AR] Браун, Майк [R-IN] Браун, Шеррод [ D-OH] Берр, Ричард [R-NC] Кантуэлл, Мария [D-WA] Капито, Шелли Мур [R-WV] Кардин, Бенджамин Л. [D-MD] Карпер, Томас Р. [D-DE] Кейси , Роберт П., Младший [D-PA] Кэссиди, Билл [R-LA] Коллинз, Сьюзан М. [R-ME] Кунс, Кристофер А. [D-DE] Корнин, Джон [R-TX] Кортез Масто, Кэтрин [D -NV] Коттон, Том [R-AR] Крамер, Кевин [R-ND] Крапо, Майк [R-ID] Круз, Тед [R-TX] Дейнс, Стив [R-MT] Дакворт, Тэмми [D-IL ] Дурбин, Ричард Дж. [D-IL] Эрнст, Джони [R-IA] Файнштейн, Dianne [D-CA] Фишер, Деб [R-NE] Гиллибранд, Кирстен Э. [D-NY] Грэм, Линдси [R -SC] Грассли, Чак [R-IA] Хагерти, Билл [R-TN] Харрис, Камала Д. [D-CA] Хассан, Маргарет Вуд [D-NH] Хоули, Джош [R-MO] Генрих, Мартин [ D-NM] Гикенлупер, Джон В.[D-CO] Хироно, Мази К. [D-HI] Хувен, Джон [R-ND] Хайд-Смит, Синди [R-MS] Инхоф, Джеймс М. [R-OK] Джонсон, Рон [R-WI ] Кейн, Тим [D-VA] Келли, Марк [D-AZ] Кеннеди, Джон [R-LA] Кинг, Ангус С., младший [I-ME] Klobuchar, Amy [D-MN] Ланкфорд, Джеймс [ R-OK] Лихи, Патрик Дж. [D-VT] Ли, Майк [R-UT] Леффлер, Келли [R-GA] Лухан, Бен Рэй [D-NM] Ламмис, Синтия М. [R-WY] Манчин , Джо, III [D-WV] Марки, Эдвард Дж.
[R-CA] Ван Дрю, Джефферсон [R-NJ] Ван Дайн, Бет [R-Техас] Варгас, Хуан [D-CA] Визи, Марк А. [D-TX] Вела, Филемон [D-TX] Веласкес, Нидия М. [D-Нью-Йорк] Вагнер, Энн [R -MO] Уолберг, Тим [R-MI] Валорски, Джеки [R-IN] Вальс, Майкл [R-FL] Вассерман Шульц, Дебби [D-FL] Уотерс, Максин [D-CA] Уотсон Коулман, Бонни [D -NJ] Вебер, Рэнди К., старший [R-TX] Вебстер, Дэниел [R-FL] Велч, Питер [D-VT] Венструп, Брэд Р. [R-OH] Вестерман, Брюс [R-AR] Векстон, Дженнифер [D-VA] Уайлд, Сьюзан [D-PA] Уильямс, Nikema [D-GA] Уильямс, Роджер [R-TX] Уилсон, Фредерика С.[D-FL] Уилсон, Джо [R-SC] Виттман, Роберт Дж. [R-VA] Womack, Стив [R-AR] Райт, Рон [R-TX] Ярмут, Джон А. [D-KY] Янг , Дон [R-AK] Зельдин, Ли М. [R-NY] Любой член Сената Болдуин, Тэмми [D-WI] Баррассо, Джон [R-WY] Беннет, Майкл Ф. [D-CO] Блэкберн, Марша [ R-TN] Блюменталь, Ричард [D-CT] Блант, Рой [R-MO] Букер, Кори А. [D-NJ] Бузман, Джон [R-AR] Браун, Майк [R-IN] Браун, Шеррод [ D-OH] Берр, Ричард [R-NC] Кантуэлл, Мария [D-WA] Капито, Шелли Мур [R-WV] Кардин, Бенджамин Л. [D-MD] Карпер, Томас Р. [D-DE] Кейси , Роберт П., Младший [D-PA] Кэссиди, Билл [R-LA] Коллинз, Сьюзан М. [R-ME] Кунс, Кристофер А. [D-DE] Корнин, Джон [R-TX] Кортез Масто, Кэтрин [D -NV] Коттон, Том [R-AR] Крамер, Кевин [R-ND] Крапо, Майк [R-ID] Круз, Тед [R-TX] Дейнс, Стив [R-MT] Дакворт, Тэмми [D-IL ] Дурбин, Ричард Дж. [D-IL] Эрнст, Джони [R-IA] Файнштейн, Dianne [D-CA] Фишер, Деб [R-NE] Гиллибранд, Кирстен Э. [D-NY] Грэм, Линдси [R -SC] Грассли, Чак [R-IA] Хагерти, Билл [R-TN] Харрис, Камала Д. [D-CA] Хассан, Маргарет Вуд [D-NH] Хоули, Джош [R-MO] Генрих, Мартин [ D-NM] Гикенлупер, Джон В.[D-CO] Хироно, Мази К. [D-HI] Хувен, Джон [R-ND] Хайд-Смит, Синди [R-MS] Инхоф, Джеймс М. [R-OK] Джонсон, Рон [R-WI ] Кейн, Тим [D-VA] Келли, Марк [D-AZ] Кеннеди, Джон [R-LA] Кинг, Ангус С., младший [I-ME] Klobuchar, Amy [D-MN] Ланкфорд, Джеймс [ R-OK] Лихи, Патрик Дж. [D-VT] Ли, Майк [R-UT] Леффлер, Келли [R-GA] Лухан, Бен Рэй [D-NM] Ламмис, Синтия М. [R-WY] Манчин , Джо, III [D-WV] Марки, Эдвард Дж. [D-MA] Маршалл, Роджер В. [R-KS] МакКоннелл, Митч [R-KY] Менендес, Роберт [D-NJ] Меркли, Джефф [D -ИЛИ] Моран, Джерри [R-KS] Мурковски, Лиза [R-AK] Мерфи, Кристофер [D-CT] Мюррей, Пэтти [D-WA] Оссофф, Джон [D-GA] Падилья, Алекс [D-CA ] Пол, Рэнд [R-KY] Питерс, Гэри К.[D-MI] Портман, Роб [R-OH] Рид, Джек [D-RI] Риш, Джеймс Э. [R-ID] Ромни, Митт [R-UT] Розен, Джеки [D-NV] Раундс, Майк [R-SD] Рубио, Марко [R-FL] Сандерс, Бернард [I-VT] Sasse, Бен [R-NE] Schatz, Брайан [D-HI] Шумер, Чарльз Э. [D-NY] Скотт, Рик [R-FL] Скотт, Тим [R-SC] Шахин, Жанна [D-NH] Шелби, Ричард К. [R-AL] Синема, Кирстен [D-AZ] Смит, Тина [D-MN] Стабеноу, Дебби [D-MI] Салливан, Дэн [R-AK] Тестер, Джон [D-MT] Тьюн, Джон [R-SD] Тиллис, Том [R-NC] Туми, Пэт [R-PA] Тубервиль, Томми [R -AL] Ван Холлен, Крис [D-MD] Уорнер, Марк Р.[D-VA] Варнок, Рафаэль Г. [D-GA] Уоррен, Элизабет [D-MA] Уайтхаус, Шелдон [D-RI] Уикер, Роджер Ф. [R-MS] Уайден, Рон [D-OR] Янг , Тодд [R-IN]
[D-MA] Маршалл, Роджер В. [R-KS] МакКоннелл, Митч [R-KY] Менендес, Роберт [D-NJ] Меркли, Джефф [D -ИЛИ] Моран, Джерри [R-KS] Мурковски, Лиза [R-AK] Мерфи, Кристофер [D-CT] Мюррей, Пэтти [D-WA] Оссофф, Джон [D-GA] Падилья, Алекс [D-CA ] Пол, Рэнд [R-KY] Питерс, Гэри К.[D-MI] Портман, Роб [R-OH] Рид, Джек [D-RI] Риш, Джеймс Э. [R-ID] Ромни, Митт [R-UT] Розен, Джеки [D-NV] Раундс, Майк [R-SD] Рубио, Марко [R-FL] Сандерс, Бернард [I-VT] Sasse, Бен [R-NE] Schatz, Брайан [D-HI] Шумер, Чарльз Э. [D-NY] Скотт, Рик [R-FL] Скотт, Тим [R-SC] Шахин, Жанна [D-NH] Шелби, Ричард К. [R-AL] Синема, Кирстен [D-AZ] Смит, Тина [D-MN] Стабеноу, Дебби [D-MI] Салливан, Дэн [R-AK] Тестер, Джон [D-MT] Тьюн, Джон [R-SD] Тиллис, Том [R-NC] Туми, Пэт [R-PA] Тубервиль, Томми [R -AL] Ван Холлен, Крис [D-MD] Уорнер, Марк Р.[D-VA] Варнок, Рафаэль Г. [D-GA] Уоррен, Элизабет [D-MA] Уайтхаус, Шелдон [D-RI] Уикер, Роджер Ф. [R-MS] Уайден, Рон [D-OR] Янг , Тодд [R-IN]
| Сортировать по: актуальность —
датировать Delaware Resource Group of Oklahoma, LLC Доха
Huntington Ingalls Industries Inc. Доха
Delaware Resource Group of Oklahoma, LLC Доха
Raytheon Intelligence & Space Доха
Raytheon Intelligence & Space Доха
| Получите новые вакансии для этого поиска по электронной почтеСоздавая оповещение о вакансиях, вы соглашаетесь с нашими Условиями. Вы можете изменить настройки своего согласия в любое время, отказавшись от подписки или как указано в наших условиях. |
 Назначение или в развернутый батальон «Патриот» в CONUS или OCONUS.
Назначение или в развернутый батальон «Патриот» в CONUS или OCONUS.Исправительные технологии | Национальный институт исправительных учреждений
Контрабанда — серьезная проблема для исправительных учреждений США (Копочински, 2012).Контрабанда, свободно определяемая как все, что заключенным запрещено хранить, представляет собой угрозу безопасности людей как внутри, так и за пределами исправительной системы. В то время как оружие, инструменты и наркотики представляют собой наиболее очевидные риски в обществе, такие предметы, как деньги, электронные устройства, продукты питания и табачные изделия, представляют собой как распространенную угрозу, так и уникальную проблему обнаружения.
В связи с общесистемной проблемой контрабанды, Национальные институты юстиции (NIJ) запросили проведение исследования рынка в отношении доступных в настоящее время коммерческих технологий обнаружения контрабанды. Этот документ представляет собой обобщенное резюме этого обзора рынка. Информация по каждой системе обнаружения контрабанды сгруппирована и обобщена, чтобы помочь сотрудникам исправительных учреждений в планировании потенциального приобретения и внедрения этих технологий. Кроме того, в этом документе содержится краткое изложение исходных исследований и методов, использованных для проведения этого опроса.
Этот документ представляет собой обобщенное резюме этого обзора рынка. Информация по каждой системе обнаружения контрабанды сгруппирована и обобщена, чтобы помочь сотрудникам исправительных учреждений в планировании потенциального приобретения и внедрения этих технологий. Кроме того, в этом документе содержится краткое изложение исходных исследований и методов, использованных для проведения этого опроса.
Этот опрос не оценивает и не ранжирует эти продукты; нет никаких мнений относительно качества или эффективности этих продуктов.Вместо этого цель этого документа состоит в том, чтобы предоставить сотрудникам исправительных учреждений широкий обзор современных технологий обнаружения контрабанды, доступных для их использования.
Данные, представленные в этом документе, были собраны с помощью различных методов исследования и сбора. В дополнение к общему поиску в Интернете, общественность широко разыскивалась с запросом информации (RFI), опубликованным в виде Уведомления Федерального реестра (FRN). Более того, чтобы максимально увеличить доступ к информации, с поставщиками, идентифицированными с помощью поиска в Интернете, напрямую связывались и предлагали ответить на FRN.Для поставщиков, которые не ответили на FRN, мы получили как можно больше информации с их веб-сайтов. В этом обзоре обобщено более 100 продуктов.
Этот документ представляет собой обзор технологий, доступных на момент исследования рынка (т. Е. 2016 г.). При рассмотрении вопроса о приобретении оборудования для обнаружения контрабанды необходимо запрашивать дополнительную актуальную информацию у конкретных заинтересованных поставщиков
Посмотрите эти удивительные фотографии СШАC-17 Globemaster III, летящий на малой высоте над озерным краем LFA в Великобритании
C-17 пролетает через LFA17 5 сентября 2020 г. (Все изображения: Саймон Пирсон-Кугилл)Вы не часто видите грузовые самолеты, летающие на малых высотах!
Потрясающие кадры в этой статье были сделаны в субботу, 5 сентября 2020 года, фотографом Саймоном Пирсоном-Кугиллом из Данмейл-Рейз, в Озерном крае, горном районе на северо-западе Англии. Они показывают самолет C-17 Globemaster III ВВС США, использующий позывной «RCh544», принадлежащий 437-му авиакрылу с Объединенной базы Чарлстон, Южная Каролина, летящий на малой высоте в Low Flying Area 17 (LFA17).
Они показывают самолет C-17 Globemaster III ВВС США, использующий позывной «RCh544», принадлежащий 437-му авиакрылу с Объединенной базы Чарлстон, Южная Каролина, летящий на малой высоте в Low Flying Area 17 (LFA17).
Гигантский самолет, вылетевший из RAF Brize Norton, можно увидеть, летящим через долину: влажные погодные условия и быстрое уменьшение давления воздушного потока вокруг крыла, когда самолет маневрировал над местностью Озерного края, почти привели к образованию конденсата. облака, подобные тем, которые часто образуются при пролете быстрых самолетов.
РЧ544 входит в долину на низком уровне.В пределах 4347 кв. Миль воздушного пространства, доступного в LFA17, включая Камбрию, Восточный Северный Йоркшир и Северный Ланкашир, британские, а также союзные тактические и транспортные самолеты могут летать на высоте до 250 футов (даже ниже над открытой водой), в то время как вертолеты могут опускаться ниже, до 100 футов над уровнем земли, даже несмотря на то, что из-за характера их задачи для конкретных тренировочных целей вертолеты также могут летать вниз на уровень земли.
C-17 пролетает через LFA17 в субботу, 5 сентября 2020 г.Хотя во всех конфликтах после Бури в пустыне боевые самолеты работали в основном на средней или большой высоте, а также использовали противостоящее оружие из-за границы поверхности врага для авиационные ракетные батареи, тактика низкого уровня остаются жизненно важными элементами способности ВВС реагировать на любой сценарий по всему миру.
Вид сбоку C-17, летящего через LFA17.Самолетам, участвующим в специальных операциях, разведке, поисково-спасательных операциях, десантных войсках или гуманитарных десантах в проблемных точках по всему миру, по-прежнему приходится летать на малых высотах.
Крупный план носовой части C-17.Например, в 2011 году, за несколько месяцев до начала воздушной войны в Ливии, самолетам RAF C-130 было поручено спасти нефтяников, которые оказались в ловушке в Ливии. Самолеты C-130 вылетели с Мальты и пролетели над Средиземным морем, называемым управлением воздушным движением Триполи, объяснили, кто они такие и что собираются делать, они не получили ответа от диспетчеров, поэтому один раз продолжили движение на низком уровне над пустыней и в враждебное воздушное пространство. Как только все нефтяники были подобраны (более чем в одном месте), по телевидению в Великобритании показали кадры, на которых Геркулес покидает небольшой удаленный аэродром, и было замечено, что пилот покинул взлетно-посадочную полосу и немедленно убрал шасси, набрав очень небольшую высоту. Выйдя из опасной зоны, самолет быстро набрал высоту вне досягаемости стрелкового оружия.
Вышеупомянутый — всего лишь пример, который доказывает, насколько низкоуровневая тактика используется не только при боевых действиях, но также важна во время операций по поддержанию мира и гуманитарных операций.
Наконец, стоит помнить, что, вообще говоря, способность летать на высоте ниже 2000 футов может быть полезна также во время обычных тренировочных вылетов, когда погодные условия таковы, что для поддержания визуального контакта с землей и VMC (Visual Метеорологические условия): недавно у меня была возможность взять интервью и поговорить с несколькими пилотами, которые объяснили, как овладение реактивным самолетом на малой высоте при продолжении навигации спасло им жизни во время тренировочных миссий в США.
Эта модель C-17 доступна в AirModels. Нажмите здесь, чтобы купить свой.Дэвид Ченчиотти — независимый журналист из Рима, Италия. Он является основателем и редактором «Авиациониста», одного из самых известных и читаемых в мире блогов о военной авиации. С 1996 года он писал статьи для крупнейших мировых журналов, включая Air Forces Monthly, Combat Aircraft и многие другие, освещая авиацию, оборону, войну, промышленность, разведку, преступность и кибервойну. Он делал репортажи из США, Европы, Австралии и Сирии, а также управлял несколькими боевыми самолетами с различными военно-воздушными силами.Он бывший второй лейтенант ВВС Италии, частный пилот и выпускник компьютерной инженерии. Он написал четыре книги.
Помощник по административным вопросам старший в Lockheed Martin Corporation
Номер вакансии: 552406BR Дата публикации: 17 марта 2021 г. Местоположение: Шелтон, Коннектикут Описание: Отдел боевых спасательных вертолетов (CRH) в настоящее время ищет помощника по административным вопросам. Эта должность будет оказывать поддержку нескольким директорам по программе CRH и управленческой команде.Квалифицированный специалист будет иметь сильные межличностные и организаторские навыки. Конфиденциальность и целостность — это требование. Должен быть выдающимся коллегой и уметь дискретно обрабатывать конфиденциальную информацию, а также сохранять самообладание в быстро меняющейся обстановке.Обязанности включают, но не ограничиваются: общей корреспонденцией, телефонными разговорами, назначением встреч, организацией поездок и отчетами о расходах, ответами на внутренние и внешние запросы клиентов и особыми обязанностями по мере необходимости.Выбранный человек должен будет выполнять сложные и разнообразные административные функции, которые требуют независимого принятия решений и решения проблем с минимальным руководством.
Поддержка взаимоотношений с клиентами и взаимодействия, включая посещения и встречи с клиентами, организацию встреч (включая, в случае необходимости, угощение) и координацию запросов на посещение с Lockheed Martin Security. Обрабатывать конференц-зал (включая резервирование, Skype, видеоконференцсвязь (VTC), Zoom, другие ИТ как жизненно важные).
Обеспечение поддержки бизнес-операций, включая: координацию, компиляцию и подготовку внутренних бизнес-обзоров, документации и отчетов; составлять и редактировать еженедельные и ежемесячные отчеты о состоянии и интересующие вас темы. Знание стандартного офисного оборудования и технологий как для эксплуатации, так и для устранения основных неисправностей. (Телефон, iPhone, компьютер, ноутбук, фотокопия, pdf и т. Д.). Согласовать парковочные места с Удобствами.
Заказ / обслуживание канцелярских принадлежностей Инвентаризация, организация отгрузки, почты и доставки, а также общий уход и координация технического обслуживания рабочей зоны (кухонный уголок и кладовая).
Самостоятельный запуск с сильной инициативой, проверенной способностью выполнять несколько задач и управлять закрытием в быстро меняющейся среде с быстро меняющимися приоритетами и короткими / твердыми сроками, которые соответствуют результатам компании.
Базовая квалификация:
1. Кандидат должен хорошо владеть Microsoft Office Suite, включая Word, Excel, PowerPoint и Outlook, а также иметь практические навыки работы с SharePoint.
2. Отличные навыки межличностного общения / способность взаимодействовать с руководителями всех уровней, коллегами, правительством и другим отраслевым персоналом профессионально, вежливо, конфиденциально и профессионально.
3. Хорошо организованный, гибкий и способный эффективно сбалансировать выполнение нескольких заданий и задач.
4. Успешный кандидат должен быть ориентирован на детали и уметь одновременно выполнять несколько задач в динамичной и быстро меняющейся командной среде.
5. Определяет приоритеты нестандартных ситуаций и будет участвовать и руководить различными проектами или инициативами по мере необходимости, включая оказание поддержки сотрудникам отдела.
6. Кандидат должен иметь готовность брать на себя все возрастающие обязанности и иметь сильное стремление к постоянному профессиональному самосовершенствованию, профессиональную манеру поведения и хорошую речь.
Желаемые навыки:
Сильные навыки межличностного общения и способность определять приоритеты и руководить рабочим процессом для достижения максимальной производительности. Сильные межличностные и коммуникативные навыки. Отличная цифровая грамотность со знанием MS Word, Excel и PowerPoint. Три года административного опыта, предпочтение отдается предыдущему опыту помощи руководителям. Самоуверен, проявляет инициативу и здравый смысл. Умение предугадывать требования руководителей бизнеса. Гибкость с возможностью многозадачности. Другая важная информация, которую вы должны знать Выражение заинтересованности: Подавая заявку на эту работу, вы выражаете интерес к этой должности и можете быть рассмотрены для других возможностей карьерного роста, где аналогичные навыки и требования были определены как соответствующие. Если это совпадение будет обнаружено, с вами могут связаться по поводу этого и будущих вакансий. Возможность работать удаленно: Удаленная удаленная работа неполный рабочий день: Сотрудник, выбранный для этой должности, будет работать часть своего рабочего графика удаленно и часть своего рабочего графика на указанном предприятии Lockheed Martin.Конкретный недельный график будет обсуждаться в процессе приема на работу. График работы: Lockheed Martin поддерживает множество альтернативных графиков работы, которые обеспечивают дополнительную гибкость для наших сотрудников. График работы варьируется от стандартных 40 часов в течение пятидневной рабочей недели, в то время как другие могут быть сокращены. Эти сжатые графики предоставляют сотрудникам дополнительное время вне офиса и дополняют наши преимущества в отношении оплачиваемого свободного времени. График для этой должности: 4×10 часов в день, 3 выходных в неделю Заявление о допущении к службе безопасности: Эта должность требует разрешения органов государственной безопасности, вы должны быть гражданином США для рассмотрения. Уровень допуска: Конфиденциально Lockheed Martin — работодатель равных возможностей / позитивных действий. Все квалифицированные кандидаты получат вознаграждение за трудоустройство независимо от расы, цвета кожи, религии, пола, беременности, сексуальной ориентации, гендерной идентичности, национального происхождения, возраста, статуса ветерана или инвалидности. Присоединяйтесь к нам в Lockheed Martin, где ваша миссия — наша. Наши клиенты справляются с самыми сложными задачами. Те, которые требуют необычайного мужества, стойкости и точности.Они опасны. Критический. Иногда они даже дают возможность изменить мир и спасти жизни. Это те миссии, которые нам небезразличны.
Являясь ведущей компанией в области технологических инноваций, обширная команда Lockheed Martin работает с партнерами по всему миру, чтобы обеспечить проверенную производительность для решения самых сложных задач наших клиентов. У Lockheed Martin есть сотрудники, базирующиеся во многих штатах США и за рубежом, с офисами во многих странах и территориях. Уровень опыта: Почасовая / без освобождения Бизнес-единица: RMS Возможен переезд: № Сфера карьеры: Административная Тип: Полный рабочий день Смена: Первая
Использование МКС: СФЕРЫ — спутниковые миссии
Использование МКС: СФЕРЫ (экспериментальные спутники с синхронизированным удержанием положения и переориентацией)
Запуск космического корабля VERTIGO Информация о статусе миссии
СФЕРА — экспериментальный стенд продемонстрировать динамику полета группировки (FF) в спутнике системы.Программа разработана и установлена на SSL (Space Системная лаборатория) Массачусетского технологического института (Массачусетского технологического института) в обеспечить ВВС США и НАСА долгосрочными, пополняемые и обновляемые возможности тестирования для проверки метрология, контроль и автономные технологии высокого риска. DARPA (Защита Advanced Research Projects Agency) является крупным спонсором SPHERES. программа, стартовавшая в конце 1990-х гг. 1) 2) 3) 4) 5) 6)
Рисунок 1: Иллюстрация трех наноспутников СФЕРЫ (кредит изображения: MIT / SSL)
Наноспутники изначально были разработан студентами MIT (в рамках программы, финансируемой MIT, DARPA и НАСА), построенный компанией Payload Systems Inc.Кембриджа, Массачусетс. Первое Эксплуатационный прототип был завершен зимой 2000 г. и испытан в г. лаборатория. Два дополнительных агрегата были изготовлены весной 2000. Первые летные испытательные эксперименты с оценкой как испытательного стенда, так и выполнение алгоритма управления, проводились (в 2000, 2001 и 2003 гг.) на борту самолета НАСА KC-135 (три летных кампании). Идея Тестирование и исследования системы СФЕРЫ на МКС (с ее устойчивым невесомым среды) для более широкого спектра приложений было естественным Последствия после успешной демонстрации лётной кампании. 7) 8) 9) 10) 11) 12)
Комбинезон В задачи входит демонстрация следующих функций: Алгоритмы автономного сближения, стыковки и реконфигурации », испытание относительной ориентации и удержания на месте между спутники, маневры перенацеливания и заполнения плоскости изображения, столкновение алгоритмы предотвращения и балансировки топлива, а также массив геометрии оценщики, используемые в различных миссиях. Основная цель SPHERES — поддержка исследований в области распределенного управления диафрагмой для таких приложений как массивы телескопов — путем замены нескольких меньших, разделенных зеркала на одно большое зеркало.Программные технологии СФЕРЫ: критически важны для работы распределенных спутников и стыковочных миссий такие как TPF (Terrestrial Planet Finder) NASA и OE (Orbital Экспресс) МО.
Рисунок 2: Иллюстрация структуры наноспутника SPHERES (кредит изображения: MIT / SSL)
СФЕРЫ наноспутников:
Спутники СФЕРА автономный с бортовой движущей силой, обработкой, радиосвязью, и метрология.Кроме того, на стенде установлено четыре метрологических преобразователя. которые предоставляют глобальные справочные данные по метрологии и портативный компьютер, который действует в качестве «наземной станции» и обеспечивает управление экспериментом.
Все СФЕРЫ сателлиты идентичны по строению и внутреннему составу. В Спутник СФЕРЫ имеет модульную конструкцию. Дизайн индивидуальный подсистемы могут быть легко интегрированы в другой проект, использующий различные конфигурации из-за их простых интерфейсов и эксплуатационных независимость. Модульность обеспечивает широкий спектр гибкости в использование объекта.Система СФЕРЫ состоит из следующих основные элементы: 13) 14)
• Три экспериментальных автономные свободно плавающие наноспутники диаметром 20 см (каждый с сухая масса 3,55 кг, влажная масса 4,16 кг), которые выполняют различные алгоритмы. Автономные наноспутники с 18 гранями многогранники.
• Пять маленьких ультразвуковых лучей устройства расположены в рабочей среде СФЕР, они действуют как навигационная система (метрологический радиомаяк).Ультразвук радиомаяки-передатчики измеряют свое положение и положение в отношение друг к другу и к определенному объему. Каждый маяк автономный и использует две стандартные батареи Duracell Ultra AA.
• Наноспутники связываются друг с другом и портативным компьютером МКС через маломощный беспроводной (РЧ) канал.
Каждый из наноспутников содержит внутренняя силовая установка на холодном газе, мощность, авионика, программное обеспечение, подсистемы связи и метрологии. Двигательная установка использует двуокись углерода (CO 2 ), которая выбрасывается через двигатели.Наноспутники SPHERES питаются от батареек AA. Метрология подсистема предоставляет информацию о местоположении и положении в реальном времени. К имитировать работу наземной станции, переносной компьютер используется для передачи навигационные данные и алгоритмы группового полета.
Диаметр | 22 см |
Сухая масса, мокрая масса | 3.55 кг, 4,3 кг (с баком и аккумуляторами) |
Тяга | 0,2 с.ш. |
Мощность, срок службы батареи | 13 Вт, 2 часа (сменный) |
Линейное ускорение, угловое ускорение | 0.17 м / с 2 (макс.), 3,5 рад / с 2 (макс.) |
CO 2, внутренний уровень давления | 170 грамм, 59 — 3,45 бар (высокое и низкое давление накопительного бака) |
Радиосвязь (диапазон УВЧ) | 916,5 МГц (± 1 МГц), 868,35 МГц (± 1 МГц) |
Таблица 1: Обзор параметров спутника SPHERES
Рисунок 3: Обзор силовой подсистемы (кредит изображения: MIT / SSL)
Рисунок 4: Расположение различных подсистем SPHERES (изображение предоставлено MIT / SSL, Payload Systems Inc.)
Рис. 5. Альтернативный вид покрытого спутника SPHERES (предоставлено MIT / SSL)
PADS (положение и отношение Система определения). Задача PADS — обеспечить в режиме реального времени информация о положении и отношении к каждому наноспутнику. PADS состоит из: 15) 16)
• Установлены ультразвуковые маяки. к «стенам» рабочего пространства и ультразвуковым приемникам расположен на борту каждого наноспутника (расположение маяков определяет рабочий объем или внешний периметр рабочего конверта).В ультразвуковые радиомаяки обеспечивают низкоскоростную (1-2 Гц) позицию спутника и информация об отношении к рабочему диапазону.
• IMU (инерциальные измерительные устройства), состоящие из акселерометров и гироскопов скорости, расположенных на борту каждого наноспутника.
Параметр | Акселерометры (Q-Flex 750) | Гироскопы (BEI Gyrochip II) |
Диапазон измерения | ± 25.6 мг | ± 80º / с |
разрешение | 12,5 мкг / шт. | 0,0407º с -1 счетчик -1 |
Пропускная способность | 300 Гц | 300 Гц |
Шум | <7 мкг среднекв. (От 0 до 10 Гц) | 0.05º / с (Гц) 1/2 (от 0 до 100 Гц) |
Таблица 2: Рабочие параметры акселерометров и гироскопов
Время пролета дальности (рабочий сценарий):
— «Главный» спутник запрашивает глобальные показания, испуская ИК-вспышку.
— Спутники отключают двигатели для прослушивания ультразвуковых импульсов
— Маяки реагируют на инфракрасную вспышку ультразвуковыми импульсами
— Приемники на спутнике записывают время приема ультразвуковых импульсов
— Спутники вычисляют дальность на основе времени пролета импульса
— Спутники рассчитывают положение и ориентацию по дальности.
Рисунок 6: Схема расположения ультразвукового устройства для определения рабочей оболочки (кредит изображения: MIT / SSL)
Рисунок 7: Блок-схема PADS (изображение предоставлено MIT / SSL, Payload Systems Inc.)
Рисунок 8: Иерархическое представление архитектуры GN&C, используемой на испытательном стенде SPHERES 17) 18)
СФЕРЫ на МКС:
Полезная нагрузка SPHERES была запланирована для полет на шаттле (STS-114) в июле 2003 г. для установки на МКС. (Международная космическая станция).Однако SPHERES испытали несколько раз длительные задержки из-за потери шаттла Колумбия (STS-107) и его экипаж из 7 космонавтов 1 февраля 2003 г. крупнейшее расследование НАСА. Как следствие расследование, этап наращивания МКС полностью остановился. Очень следующий рейс шаттла (STS-114) состоялся 26 июля 2005 г. и закончился в 2 1/2. лет заземления Shuttle.
Первая из трех сфер полезной нагрузки SPHERES была доставлена в американскую лабораторию (Unity) МКС 24 апреля 2006 года. Сервисный полет МКС обеспечивал ракета-носитель «Союз-У» с полезная нагрузка «Прогресс М-56» с космодрома Байконур, Казахстан. Два дополнительных сферы СФЕР должны достичь космической станции, поскольку полезные нагрузки миссии «Шаттл» к концу 2006 г. Микрогравитация окружение МКС позволяет маневрировать в 6 степенях свободы (степень Свобода). Выделенное тестовое пространство (рабочий пакет) в лаборатории США имеет размеры около 1,5 м х 1,5 м х 2 м. 19) 20)
Стенд МКС обеспечивает устойчивая к риску среда, способная тестировать неизвестные алгоритмы и восстановление после сбоев с низкими затратами по сравнению с полным миссия.Программа обеспечивает управление человеком в режиме реального времени и возможность наблюдения для приглашенных ученых на наземной станции, а также возможность манипулирования операторами на МКС.
Стенд СФЕРА состоит из двух части; наземный испытательный стенд, расположенный в MIT / SSL, и летный испытательный стенд в МКС, которая используется космонавтами как интерактивная лаборатория. МКС предоставляет уникальные возможности для:
— Интерактивные эксперименты под присмотром взрослых
— Немедленная оценка результатов испытаний
— Космические исследования в среде, толерантной к риску
— Эксперименты в трехмерной динамике микрогравитации.
Элементы СФЕР на МКС могут маневрировать в шести степенях свободы, общаться друг с другом и со станцией управления портативным компьютером и определить их положение, скорости, положения и угловые скорости относительно фиксированной на МКС или лабораторно фиксированная система отсчета. 21)
Маневры выполняются с использованием двигательная установка на холодном газе. Каждый узел подруливающего устройства состоит из электромагнитный клапан с микрообработанным соплом. Двенадцать подруливающих устройств сборки расположены попарно, чтобы обеспечить полное расположение и позиционный контроль.Топливо хранится в съемных емкостях. Каждый танк обеспечит около 30 минут активного работа в условиях микрогравитации при нормальной работе на МКС.
Программа СФЕРЫ на МКС под руководством MIT / SSL и Aurora Flight Sciences при поддержке DoD / DARPA (Агентство перспективных оборонных исследовательских проектов) и STP (Space Test Program), а также НАСА.
Рисунок 9: CAD-рендеринг СФЕР (изображение предоставлено MIT / SSL)
Каждая сфера имеет встроенный DSP (Цифровой сигнальный процессор) Texas Instruments (модель C6701), обеспечивающий достаточная вычислительная мощность и гибкость (до 167 MFLOPS с неоптимизированный код и до 1.0 GFLOPS с полностью оптимизированным кодом). В полетное программное обеспечение хранится во флэш-памяти и может занимать до 224 Кбайт в размер.
Две упаковки батареек AA обеспечивают питание каждой сферы. Комплект батарей обеспечивает питание в течение двух часов при обычной работе.
Радиосвязь: каждый спутник оборудован двумя маломощными трансиверами для межспутниковая связь и связь между спутником и портативным компьютером. Сферы общаются по двум отдельным радиоканалам. Каждый канал имеет эффективную пропускную способность около 22 кБайт / с.Один канал выделен для связи между сферами (STS), другой канал используется для связь между сферой и портативным компьютером (STL). Канал STS обычно используется для координации определяемого пользователем алгоритма, в то время как STL канал обрабатывает нисходящий канал телеметрии и командный восходящий канал. Оба канала двунаправленные; однако оборудование связи является полудуплексным, Это означает, что только одна станция на каждом канале может передавать одновременно.
Рис. 10. Принцип работы испытательного стенда SPHERES на МКС (изображение предоставлено компанией Boeing)
Запуск следующих полезных нагрузок СФЕР :
• Прибыл второй спутник на полете STS-121 «Дискавери», 4-17 июля 2006 г. (13-дневный полет).В прибытие позволило протестировать «двухспутниковую конфигурацию» который начался в августе 2006 года.
• Третий прибыл рейсом STS-116, Discovery, 10-22 декабря 2006 г. (13-дневный полет).
Таким образом, эксперименты с полной конфигурацией системы SPHERES начались внутри МКС в 2007 году.
Тестовые сеансы СФЕР на борту МКС:
Проведено пять тестовых сессий. на борту МКС в 2006 г.: 18 мая, 20 мая, 12 августа, 19 августа и 11 ноября.Тестовая сессия с первой одиночной сферой прошла на 18 мая 2006 г. — плавает внутри МКС и за ним наблюдают космонавты. Первый испытательный полет состоял из 10-15 серий. заранее запланированные маневры продолжительностью до 10 минут. 22)
Первые четыре сеанса помогли Команда SPHERES достигает стабильной работы, полностью понимая возможности микрогравитации и поведение объектов и МКС. Используя данные, собранные во время каждой тестовой сессии, команда SPHERES постепенно совершенствовались алгоритмы полета и стыковки формации, в результате во многих «космических первенствах».«Во второй тестовой сессии он была первой космической программой, намеренно имитирующей отказы двигатели в космосе для проверки алгоритмов обнаружения неисправностей. В течение пятая сессия SPHERES первой продемонстрировала стыковку с падающая цель в условиях микрогравитации. Круговое образование полет был еще одним первым (демонстрация покрытия оптического поля в микрогравитационная среда с отделенными космическими аппаратами), хотя там были проблемы с синхронизацией, которые помешали полностью выполнить тест успешно, поэтому требует дальнейших исследований.- Ожидается, что СФЕРЫ работать на станции в течение нескольких лет для выполнения этих задач и больше.
сессия | Цели |
1 | — Проверка оборудования |
2 | — Исправление прошивки (из сеанса 1) |
3 | — Автономная стыковка с фиксированным радиомаяком |
4 | — Проверка глобальной метрологической системы |
5 | — Продолжить испытания для mass-ID |
Таблица 3: Обзор тестовых сессий на МКС в 2006 г.
Рис. 11. Аппаратные компоненты SPHERES, работающие на борту МКС (изображение предоставлено НАСА, Массачусетский технологический институт)
Рис. 12. Эксперимент «СФЕРЫ» двух блоков модуля «Судьба» на МКС, увиденный астронавтом Томасом Рейтером (изображение предоставлено НАСА)
Рис. 13: Три спутника строятся на МКС в рамках расследования SPHERES (изображение предоставлено НАСА)
GSP (Программа приглашенных ученых):
SPHERES GSP обеспечивает общий рамки для сотрудничества и облегчает доступ к СФЕРАМ лаборатория (распределенная архитектура).Он предназначен для поддержки параллельное использование испытательного стенда исследователями с разнообразными исследованиями интересы и цели. В частности, GSP позволяет географически распределенных исследователей для реализации и тестирования алгоритмов, получения данные экспериментов, повторение дизайна алгоритма и иное участие полностью в наземных и летных лабораториях во временных масштабах дней и недели, а не годы. 23)
В 2006 году GSP уже началась; в первых тестовых сессиях участвовали участники из другой группы из Массачусетского технологического института и из НАСА Эймса.
Перед отправкой алгоритмов СФЕР к МКС ученые проводят испытания на плоском столе СФЕРЫ Стенд в лаборатории SSL MIT. На испытательном стенде с плоским столом используется то же летное оборудование, которое находится на борту МКС, но СФЕРЫ установлены на воздушные перевозки, чтобы плавать на нем.
Задача маневра реконфигурации для нескольких космических аппаратов в условиях дальнего космоса:
Существует два основных типа задач построения траектории для группового летающего космического корабля: 24)
1) Реконфигурация, которая состоит из маневрирования флота космических кораблей из одного строя в другой.
2) Станция хранения, состоящая из удержания группы космических кораблей в определенном строю для определенный участок траектории.
Оба типа летных построений маневры должны учитываться для миссий в дальний космос, где относительный динамика космического корабля обычно сводится к двойным интеграторам, или планетарным полеты в орбитальной среде, где космические корабли подвергаются значительная орбитальная динамика и нарушения окружающей среды.
Эксперименты SPHERES были разработан с использованием двух разных двухэтапных алгоритмов планирования пути ранее разработан для решения общей задачи перевода космических аппаратов и задача маневра реконфигурации вращения со связанными ограничениями.Эта проблема особенно сложна из-за нелинейности динамика отношения, невыпуклость некоторых ограничений, и связь между положениями и положениями всех космических кораблей. 25)
В марте и апреле 2007 г. эксперименты по реконфигурации проводились со СФЕРАМИ на МКС, которые позволили протестировать алгоритмы маневра реконфигурации в реальных условиях микрогравитационная среда. — Эксперименты на МКС достигли своего главного цель: применение конструкции двухэтапных маневров реконфигурации к реальным спутникам в условиях микрогравитации, тем самым подтверждая алгоритмы, используемые для их разработки.
Программа ZERO-Robotics:
В 2009 году Массачусетский технологический институт запустил программу ZERO-Robotics, которая предоставляет старшеклассникам возможность разрабатывать алгоритмы для СФЕР на сесть на МКС. Студенты работают над разработкой программного обеспечения, чтобы выполнить сложные задачи в космосе; такие как стыковка, сборка и формирование полет. Что касается конкурса, каждая команда должна выполнить набор заранее определенные задачи, в соответствии с которыми они оцениваются по производительности. В течение на всех этапах студенты будут сталкиваться не только с программированием, но также с разработкой документации и презентаций добавить их инженерным и коммуникативным навыкам.Во всех случаях студенты должны будут учиться и практиковать успешные навыки работы в команде, поскольку будут требования к минимальному размеру команды. 26)
Конкурс состоит из четырех этапов:
1) Подача заявки: студенты предложить решение задачи конкурса. Студенты должны четко обозначить мотивацию, научные данные, лежащие в основе их алгоритма, как они будут реализовывать это, и данные, которые они ожидают собрать, чтобы показать это работал исправно. Этот этап предназначен для обучения студентов основам написание предложения.Этот шаг также служит этапом регистрации. Команды не удаляются на этом этапе.
2) Моделирование: учащиеся выполняют их алгоритм в моделировании. Этот шаг проверяет успешный алгоритм реализация до тестирования оборудования и позволяет определить базовый уровень ожидание производительности. Если количество участвующих команд больше, чем может быть размещено в полете, этот шаг можно использовать как отборочный тур.
3) Земля Тестирование: команды переводят свои алгоритмы с моделирования на оборудование, учет вычислительных и коммуникационных ограничений.Команды, которые продемонстрировать правильно работающие симуляторы приглашены в квартиру Массачусетского технологического института этаж в Кембридже, Массачусетс, чтобы проверить их. Команды отбираются на основе о производительности аппаратных тестов.
4) Летные испытания: выбранные команды изменят свои алгоритмы для реализации в космосе. Тесты интегрированы и упакованы для работы на ISS. Этот шаг включает в себя минимум один сеанс испытаний МКС с прямой трансляцией экипажа, выполняющего тесты. Студенты будут иметь возможность просмотреть свой тестовый прогон в в реальном времени.Данные и телеметрия будут переданы учащимся через несколько дней после мероприятия, чтобы они могли провести анализ данных и отправить заключительный отчет.
ZERO-Robotics задуман как соревнование по робототехнике, открывающее исследовательские центры мирового уровня на ISS сотням (потенциально тысячам) студентов в нескольких образовательные уровни. Основная цель — вдохновить будущих ученых и инженеры, используя преимущества и ресурсы космической программы осязаемо для студентов.Таким образом, студенты будут видеть работу в космос как достижимая цель, которая предназначена не только для космонавтов, и вырастет, раздвигая границы освоения космоса, инженерии, и развитие. Кроме того, ZERO-Robotics помогает создавать критически важные инженерные навыки для студентов, такие как решение проблем, дизайн мыслительный процесс, операционное обучение, командная работа и презентация навыки и умения.
Цель ISS как национального Лаборатория должна обучить их на более глубоком уровне, чтобы студенты интересуется наукой, техникой, инженерией и математикой ( STEM ).
• Пилотная программа: A пилотная программа Zero-Robotics была запущена осенью 2009 г. студенты двух средних школ в Айдахо. Пилотная программа не требовать от команд создания предложений, и не было «Отборочные» раунды. Однако они соревновались с друг друга в симуляции на плоском полу и на борту МКС. В в середине декабря 2009 г. команды двух школ успешно выполнили их СФЕРЫ управляют программным обеспечением на станции (помощь от Массачусетского технологического института).
• Национальная программа: завершение пилотной программы знаменует начало подготовки к первый год (2010 г.) национальной программы.Несколько организаций образуют часть усилий ZERO-Robotics: MIT SSL, Aurora Flight Sciences, Программа космических грантов, DARPA и NASA (ссылка 26).
— Команда MIT SPHERES руководит академической работой и разработкой программного обеспечения (учебные пособия, моделирование, сценарии соревнований и т. Д.).
— Aurora Flight Sciences обеспечивает продолжение эксплуатации СФЕР на борту МКС путем изготовления и обеспечение поставок СФЕР.
— Программа космических грантов была приблизились к тому, чтобы стать генеральной администрацией и обеспечить общественное отношения и человеческие ресурсы.
— Управление образования НАСА ожидается, что хотя бы один человек будет постоянно поддерживать связь с программа, работа с бригадами и командами по связям с общественностью.
— DARPA, первоначальный спонсор СФЕРЫ, будут участвовать, обеспечивая дальнейшие связи с общественностью и источник идей для конкурсов; есть потенциал Министерство обороны спонсировало стипендии для участников / победителей.
VERTIGO (визуальная оценка для относительного отслеживания и проверки общих объектов)
В 2008 году MIT / SSL (Space Systems Лаборатория) начали программу по разработке апгрейда до СФЕР спутники, которые позволят ему выполнять навигацию на основе видения эксперименты на борту МКС.Это был LIIVe (Low Impact Инспекционная машина) программа, спонсируемая Управлением военно-морского флота. Исследования и NRL (Военно-морская исследовательская лаборатория). Эта программа Намерение состояло в том, чтобы разработать высокоточный прототип оборудования, которое может быть запущен на МКС в рамках будущей программы. Эта программа привели к разработке и производству очков LIIVe Goggles, показанных на Рисунок 14. 27) 28) 29) 30)
Рис. 14. Фотография очков LIIVe Goggles (предоставлено MIT)
LIIVe Goggles добавляет два оттенка серого камеры (в стерео или под прямым углом), 1.0 ГГц через Микропроцессор C7 x 86, флешка на 16 ГБ, светодиодная подсветка, сетевая карта 802.11g и литий-полимерные батареи для питания Очки для плавания. В рамках программы LIIVe ряд систем визуальной навигации эксперименты проводились как для кооперативных, так и для некооперативных целевой осмотр.
Очки VERTIGO Goggles: в 2010 г. MIT / SSL и Aurora Flight Sciences начали спонсируемую DARPA VERTIGO (Визуальная оценка и относительное отслеживание для проверки общего Объекты) программа.Эта программа должна была доработать и запустить Goggles. разработаны в рамках программы LIIVe, а также выполняют дополнительные исследования по проверке неизвестных, не сотрудничающих целей, которые возможно движение и кувырок. Очки получили ряд незначительных доработки и обновления. Финальная версия Goggles для полета на МКС: показан прикрепленным к спутнику SPHERES в MIT / SSL (рис. 15).
Рис. 15. Очки VERTIGO Goggles, прикрепленные к спутнику SPHERES (изображение предоставлено MIT)
Процессор был модернизирован до Via 1.2 ГГц Через Nano сетевая карта обновилась до 802.11n, аккумулятор был заменен на блок, который уже был на борту МКС, а оптика были модернизированы до объектива с большей апертурой, который был в синхронизированном стерео конфигурация. Добавлена дополнительная флешка для создания всего 128 ГБ дискового пространства. Механическая конструкция была доработана, чтобы соответствовать требованиям операций внутри МКС.
Схема электронной системы Goggles и общая компоновка устройства показаны на рисунках с 16 по 18.Средняя потребляемая мощность очков Goggles составляет примерно 24 Вт, но может варьироваться от 14 до 30 Вт в зависимости от нагрузки системы.
Рис. 16. Схема в разрезе встроенных очков VERTIGO Goggles (изображение предоставлено MIT)
Одна из основных конструктивных особенностей Goggles — это возможность модернизации в будущем. Конструкция включает в себя два методы модернизации будущих систем. Первый — это съемная оптика. устанавливать . Крепление оптики содержит датчики CMOS камеры, линзы, светодиоды и дополнительные схемы.Интерфейс между Блок авионики Goggles и крепление оптики электромеханическое. связь. Механическое соединение состоит из четырех невыпадающих винты с накатанной головкой, которые можно удалить, чтобы отсоединить крепление оптики. В электрическое соединение обеспечивает питание 12 В, данные USB, Ethernet и RS232 для взаимодействия со СФЕРАМИ и очками. Крепление оптики могло быть заменен другим оборудованием с другими датчиками или другие возможности. Примеры обновлений могут включать камеры в другой конфигурации или другой модели, или даже может содержать совершенно другая сенсорная система (т.е. система LIDAR). Секунда Метод обновления Goggles — через соединение 802.11n. Могут быть добавлены сторонние системы обработки изображений. которые фиксируются Goggles и передаются по беспроводной сети. сеть.
Рис.17: Вид спереди очков VERTIGO Goggles (изображение предоставлено MIT)
Рисунок 18: Схема электронной системы очков VERTIGO Goggles (изображение предоставлено MIT)
Статус программы VERTIGO: СФЕРА-ВЕРТИГО была запущена к МКС на космическом корабле «Союз» с Космодром Байконур, Казахстан, 23 октября 2012 года.
SSE (эксперимент SPHERES Slosh)
Проблемы, связанные с плесканием, усиливаются Концерн в разгонном блоке ракет и космических аппаратах. В микрогравитация, влияние всплесков жидкого топлива может влиять на критические маневры, такие как стыковка грузовых автомобилей или наведение спутников. Уверенность в CFD (вычислительная жидкость) Динамика) прогнозы занижены из-за отсутствия сравнительного анализа экспериментальные данные. Цель SSE (SPHERES Slosh Experiment) — получать долгосрочные данные о всплеске жидкости с низкой плотностью на борту Международная космическая станция. 31) 32)
• МКС дает возможность получать данные о плечевых потоках с низкой гравитацией.
• Используйте проверенное оборудование SPHERES на ISS
• Первая в мире база данных длительного жидкого слива.
Рисунок 19: Иллюстрация собранного оборудования SSE, показывающего основные компоненты (изображение предоставлено FIT, NASA, MIT)
SSE был построен FIT (Технологический институт Флориды) в Мельбурне, Флорида, в расследовать этот вопрос.Он использует два блока SPHERES, соединенных рамкой. Несколько пластиковых резервуаров в форме таблеток, частично заполненных используется вода с долей заполнения 20%, 40% и твердой массой репликатор, представляющий равномерно распределенный резервуар для фракций, заполненный на 40%. Камеры высокого разрешения фиксируют движение жидкости внутри танка, поскольку эксперимент маневрирует в испытательном объеме МКС, либо управляется СФЕРАМИ или вручную членом экипажа. Инерционное измерение единицы регистрируют ускорения танка, создавая комбинацию стереоизображение и инерциальные данные на входе для CFD (вычислительная Fluid Dynamics) валидация модели. 33) 34)
Пуск: Оборудование SSE было запущен 9 января 2014 г. на борту Cygnus CRS Orb-1 (Cargo Resupply Миссия-1) Orbital Sciences, заключенная по контракту с НАСА, на МКС. В Cygnus CRS Orb-1 — второй полет орбитального корабля Cygnus беспилотный корабль снабжения МКС.
Рис. 20. Бортинженер Ричард Мастраккио с SSE на борту модуля KIBO МКС (изображение предоставлено НАСА, FIT)
Ядро SSE состоит из частично заполненного (с водой) прозрачного бака, установленного к несущему каркасу и двум камерам (в ортогональной конфигурации) запись распределения жидкости (рисунок 19).Два набора IMU (инерциальных измерительных единиц) используются для записи инерционные измерения. SSE использует проявленные СФЕРЫ лаборатории и будет использовать платформу VERTIGO (уже на борту МКС). Агрегаты SPHERES приводят в движение SSE, а агрегаты VERTIGO используются. для записи захваченных данных IMU / камеры на свои локальные жесткие диски. Соответствующее освещение для захвата изображения обеспечивается за счет светодиодных панелей, установлен внутри Backdrop и Hood. Коробка Slosh Avionics содержит IMU, а также обеспечивает питание камеры и светодиодных панелей. через блок VERTIGO.Каждый из блоков авионики Slosh подключается к блок VERTIGO. Пакеты VERTIGO-Slosh Avionics Box затем подключаются к блоки SPHERES через порт расширения SPHERES. Каждый блок СФЕР находится в седлах рычага рамы и зажимается во время SSE операция. Во время тестовых сессий выполняются разные маневры, на основе конкретных научных потребностей, установленных для сеанса. Эти маневры включают исследование широкого спектра выплескивания в условиях микрогравитации явления, от корреляций CFD до маневров перспективных космических аппаратов, планируется совместно как с государственными органами, так и с коммерческими партнерами.
Всего девять научных сессий выполняется на борту МКС. К августу 2015 г. проведено 5 научных сессий. завершено, запланировано еще три.
Сессия | Объем бака | Дата |
Касса | 40% | 22 января 2014 |
Сессия 1 | 40% | 28 февраля 2014 |
Сессия 2 | 20% | 18 июня 2014 г. |
Сессия 3 | 20% | 09 сентября 2014 |
Сессия 4 | 40% | 17 июля 2015 |
Сессия 5 | 40% | 07 августа 2015 |
Сессия 6 | 40% | сентябрь 2015 |
Сессия 7 | TBD | TBD |
Сессия 8 | TBD | TBD |
Таблица 4: Сводка дат и резервуаров, использованных для каждой из сессий
Первая сессия состояла из полная проверка эксперимента, проверка на возможное повреждение полезной нагрузки при транспортировке на МКС, а также первой задней части данные бегут.Научные сессии 1, 2 и 3 целенаправленная оптимизация данных, с упором на создание надлежащих начальных условий для жидкость.
Для того, чтобы данные были полезны для проверки и привязки моделей CFD маневры должны начинаться с жидкость в несложной и простой конфигурации воспроизведенный. Слишком сложные начальные условия не могут быть точно воспроизводится в CFD, что приводит к неточности моделирования.
Поняв, что начальный состояние в резервуаре не способствует валидации CFD, оно было решил, что во всех будущих сеансах будет предпринята попытка удалить пузыри и создать менее сложное начальное условие.После оформления заказа сессия была завершена, команда приступила к разрешению первоначального проблемы условий, разрабатывая маневры, которые должны заставить воздух отделить от жидкости и достичь хорошего начального состояния.
Вызван следующий сеанс тестирования. Наука 1, поскольку она будет служить первой сессией с собиранием науки данные как основная цель. Для этого сеанса в общей сложности три маневры были разработаны, чтобы попытаться произвести лучший начальный условие. Члены экипажа, проводившие сеанс, были проинструктированы попробовать все три и определите, какой из них работает лучше всего.Первый маневр включал ускорение системы по главной (длинной) оси и быстрое доведя его до остановки. Второй метод заключался в вращении эксперимент с одной из СФЕР. Оба эти метода были справедливо эффективно, но требует большого количества места, что нелегко доступно на МКС. Третий способ оказался предпочтительным. метод, так как занимал меньше места и оказался наиболее эффективным. Этот Метод включал вращение системы вокруг ее центральной оси. Когда члены экипажа выполнили этот маневр инициализации вручную, жидкость чисто разделить на две части и сделать хорошее начальное состояние.Рисунок 21 иллюстрирует разницу между плохим начальным состоянием, как видно во время оформления заказа, и хорошее начальное состояние, как видно после реализация маневра инициализации.
Наука 1 была очень продуктивная сессия, в которой использовался бак 40%. Эта сессия успешно выполнено 11 заездов. Некоторые из этих прогонов были завершены с помощью светового коробка удалена, чтобы члены экипажа могли следить за тем, насколько хорошо маневры инициализации сработали. Как только жидкость была правильно инициализирован, членам экипажа было дано указание запустить подруливающее устройство. последовательность стрельбы.Большинство запусков завершено во время этого сеанса задействованы подруливающие устройства от СФЕР.
Рисунок 21: Эволюция начальных условий в течение первых трех научных сессий (изображение предоставлено FIT, НАСА)
Постобработка данных научной сессии 1 показала, что:
• Уровни ускорения достигнутые двигателями на СФЕРАХ просто слишком низки, чтобы создать любое значительное движение жидкости. С момента валидации инструментов CFD требуется плавное движение, качество данных этого сеанса было довольно низкий.
• Члены экипажа были способный подтолкнуть систему таким образом, чтобы создать интересную жидкость движение в танке. Более высокие уровни ускорения, достигаемые вручную перемещение эксперимента позволило получить данные более высокого качества.
Поскольку низкий уровень тяги от СФЕР было определено недостаточно для правильного перемещения жидкости в резервуаре, следующий сеанс был разработан таким образом, чтобы проходит с маневрами экипажа.
Science 2 был первым сеанс для использования резервуара для фракции 20%, обозначенного L20, и те же принципы оседания, что и для резервуара 40% (L40), были применены к этот сеанс, как показано на рисунке 21c).Он состоял из нескольких тестов при вращательных, поступательных и качающих движениях.
Science 3 , выполненный с резервуаром L20 (20% заполнения), содержал несколько конкретных маневров по вопросам развертывания спутников.
Science 4 был сосредоточен на воспроизведении тех же маневров из Science 3, используя вместо этого 40% танк.
Как показано на Рисунке 21a, b и c, в резервуаре не видно мениска, что свидетельствует о полностью увлажненном внутренняя поверхность. Это вызвало особый интерес к поиску переходное значение числа Бонда между полным поверхностным натяжением с доминирующим режимом в инерционный режим с преобладанием наблюдение за мениском.Во время 5-й научной сессии члены экипажа попросили выполнить маневры вручную за пределами кадра слияния и обеспечить визуальную обратную связь по характеристикам перехода.
СФЕРЫ статус миссии
• 11 сентября 2020 г .: члены экипажа на борту Международной космической станции проводил научные исследования по гидродинамике, прочным покрытиям для космический корабль и технологии конфокального микроскопа в течение недели с сентября. 7. 35)
— Сейчас исполнилось 20 лет постоянного присутствия человека, космическая станция обеспечивает платформу для длительные исследования в условиях микрогравитации и для обучения жизни и работа в космосе.Опыт, полученный в лаборатории на орбите, поддерживает Artemis, программу НАСА по продвижению к Луне и Марсу.
— Турбулентность в резервуаре: В течение этой недели члены экипажа провели несколько запусков FLUIDICS. изучение. Это мероприятие, спонсируемое ЕКА (Европейское космическое агентство), В эксперименте используются три прозрачных, заполненных жидкостью сферы для оценки явления плескания жидкости и турбулентности поверхностных волн в топливный бак космического корабля. Лучшее понимание выплескивания может позволить разработчиков оборудования, чтобы уменьшить его влияние на наведение и точность спутники и оптимизировать срок службы спутников за счет улучшенного топлива управление.Наблюдение турбулентности поверхностных волн в условиях микрогравитации может дать представление об измерении существующего объема в сфере — или, другими словами, поможет более точно определить, сколько топлива в танк. На Земле гравитация и поверхностное натяжение влияют на турбулентность, но микрогравитация позволяет ученым сосредоточиться только на конкретных эффектах поверхностное натяжение.
Рисунок 22: На этом изображении показан Экспериментальное оборудование FLUIDICS с одним из трех прозрачных сферы. В ходе исследования оцениваются явления вспучивания жидкости. и турбулентность поверхностных волн в топливном баке космического корабля (кредит изображения: CNES)
• 31 июля 2020 г .: Спутники, пусковые установки и многие другие космические аппараты должны нести жидкое топливо в резервуары, но если резервуары не заполнены, эта жидкость плещется вокруг внутри и может сбить траекторию корабля — аналогично как раскачивается наполовину заполненная бутылка с водой, если ее бросить, кроме микрогравитация. 36)
— Недавно закрытый ESA GSTP (Общая программа поддержки технологий) деятельность с ArianeGroup, Германия воспользовалась продолжающимся экспериментом НАСА, чтобы смоделировать как именно частично заполненные емкости с жидкостью могут повлиять на движение космического корабля.
— Эксперимент НАСА на борту Международная космическая станция использует два небольших летающих роботизированных СФЕРЫ с крошечные двигатели для буксировки заполненной жидкостью капсулы, пытаясь управлять ею в условиях микрогравитации с использованием программного обеспечения и заранее запрограммированных траекторий.
— Пока этот эксперимент СФЕРЫ намеревается улучшить наше понимание объектов, спускаемых с орбиты, таких как вышедший на мель спутник, эта информация также передается на Команда ArianeGroup, которая моделирует движение капсулы в цифровом виде и лучшее средство для смягчения любых отклонений от запланированного маршрута.
— Действие обнаружило, что цель буксировки жидкой капсулы в заданном направлении было только управляемый, потянув за три тела (две СФЕРЫ, один резервуар для слива) по прямой и, по сути, хлюпающая жидкость выгодно, когда предпринимались попытки стабилизировать неконтролируемый резервуар движение.Фактически было обнаружено, что сила троса должна ослабевать. через центр тяжести тела, поскольку любое отклонение нарушить направление полета. Осознавая эту проблему, вы можете накладывают дополнительные ограничения на будущие концепции привязи.
Рисунок 23: Сферы МКС эксперимент. Д-р Данило Роашио (Массачусетский технологический институт, Массачусетский технологический институт) и доктор Филипп Бехрузи (ArianeGroup) в лабораториях Массачусетского технологического института проводят первая экспериментальная установка NASA SPHERES Tether Slosh (фото кредит: MIT)
— Была ли привязана привязь ближе к центру тяжести танков, насколько ослаблен трос и как сильно трос дергал танк при буксировке все требует большего экспериментирование, чтобы определить, какое влияние они действительно оказали на полученные результаты.
— Далее также потребуются исследования, чтобы определить, насколько велико демпфирование. необходимо управлять подобной системой, особенно если тела медленно движутся относительно друг друга. Если трос дергается за неконтролируемое тело, оно может в конечном итоге иметь большую скорость, чем буксируя космический корабль, окончательно врезавшись в него. Использование резервуара, заполненного жидкостью передал часть кинетической энергии в движение жидкости, уравновешивая рывком троса и уменьшением скорости тела.
— В конце концов, эта цифровая модель можно будет масштабировать для моделирования пусковых установок, спутников и любых неуправляемый объект, который необходимо буксировать на тросе.
• 31 января 2018 г .: НАСА астронавты Джо Акаба и Марк Ванде Хей принесли пару крошечных спутники, также известные как СФЕРЫ (синхронизированное удержание позиции, задействование, Reorient, Experimental Satellites) для запуска SmoothNAV поэкспериментируйте сегодня. В исследовании изучается, как алгоритмы и датчики может помочь определить относительные положения и скорости между космический корабль. 37)
— Экипаж наладил работу СФЕР область для активации и проверки оборудования и портативного компьютера EXPRESS (ELC) перед проведением эксперимента SmoothNav.SmoothNav разрабатывает алгоритм оценки агрегированного относительного состояния измерения между несколькими, небольшими и потенциально разными приборный космический корабль. Алгоритм получает наиболее вероятные оценка относительных положений и скоростей между всеми космический корабль с использованием всей доступной сенсорной информации, в том числе прошлой измерения. Алгоритм остается переносимым между разными спутниковые платформы с различными бортовыми датчиками, адаптируемые в в случае, если один или несколько спутников становятся неработоспособными и устойчивыми к измерения с задержкой или измерения, полученные на разных частотах.
• 17 марта 2017 г .: СФЕРЫ расследование стало популярным проектом среди космонавтов Международная космическая станция. Более десяти лет объект SPHERES в Исследовательском центре Эймса НАСА в калифорнийском Кремниевом Valley продолжила успешную деятельность и поставила впечатляющие и все более сложная наука для сообщества ISS. 38)
— На одиннадцатом году операций, СФЕРА начинает 2017 год, установив рекорд за всю историю большинство тестовых сессий SPHERES с семинедельным периодом.С января Компания SPHERES провела девять тестовых сессий, четыре из которых прошли. за одну неделю, спина к спине. Типичные сеансы тестирования проводятся один раз в четыре раза. до восьми недель, создав прецедент для работы СФЕР на высоком шаг. Девять тестовых сессий потребовали более 61 часа тестовой сессии. время, с более чем 100 часов рабочего времени экипажа, потому что некоторые сеансы использовали многократный экипаж. Было проведено пять различных исследований / экспериментов. за эти девять сеансов, каждый из которых требует специального оборудования конфигурации.Таким образом, некоторые расследования проводились более одного раза или несколько дней. В сеансах участвовали четыре из шести экипажей МКС.
— В январе первые три теста Сессии были потрачены на успешное завершение курса High School Zero Robotics. (ZR) соревнование.
— 1 февраля четыре научных расследования проводились в течение двух недель, по две или более каждой день. Во время этих тестовых сессий команда SPHERES сотрудничала с Разработчик полезной нагрузки (PD) и ведущие исследователи (PI) из Массачусетского технологического института в Бостон, Космический центр Кеннеди (KSC) и Airbus Defense в Хьюстоне.Код внедрение, планирование деятельности, обновление процедур для экипажа и тестирование оборудования и оборудования — вот некоторые из многих задач, необходимых для обеспечить готовность объектов МКС и СФЕР к успешной эксплуатации. этих тестовых сессий.
— На сегодняшний день команда SPHERES провела следующие тестовые сессии:
4 января 2017: Тест Zero Robotics Units
16 января 2017: Zero Robotics Dry Run
27 января 2017: Событие финала Zero Robotics
31 января 2017: SLOSH Tank Maneuver
1 февраля 2017: SPHERES-Tether Science 1
2 февраля 2017 г .: SPHERES-Halo Checkout, часть 1
3 февраля 2017: SPHERES-Halo Checkout, часть 2
9 февраля 2017 г .: SPHERES-Docking Port Science 1B
14 февраля 2017: SPHERES-Docking Port Science 1C.
— Проверка оборудования SPHERES Halo (Рисунок 24) была важной вехой во время тестовых сессий. СФЕРЫ Halo — это шестигранная кольцевая конструкция, закрепленная вокруг СФЕР спутник и электрически подключен к блоку авионики VERTIGO. Благодаря стандартизованному интерфейсу и разъему можно использовать широкий спектр периферийные устройства могут быть подключены к спутнику, увеличивая возможности и гибкость СФЕР. Эти периферийные устройства могут быть несколько стыковочных портов для различной геометрии сборки, оптический дальномеры, термокамеры, гироскопы контрольного момента, а также роботизированные руки для обеспечения возможностей борьбы.
— За шесть недель две стыковки Проведены портовые тестовые сессии. Док-порт SPHERES — это андрогинный механизм стыковки и швартовки, позволяющий две СФЕРЫ сателлиты автономно выравнивать и жестко подключать. Стыковочные порты также есть камеры и реперные маркеры, распознаваемые компьютером алгоритмы видения для помощи в сближении двух спутников. В возможность сборки нескольких СФЕР вместе помогает моделировать и разрабатывать миссии, в которых сложные космические конструкции работают автономно собираются и контролируются с использованием общих ресурсов.
Рис. 24. Астронавт НАСА Шейн Кимбро делает снимок с двумя аппаратами Halo (изображение предоставлено НАСА Эймс)
— С заключением Трехлетнее расследование SPHERES-Slosh в 2016 году стало популярным поскольку были разработаны дополнительные маневры и использование только танка без оборудования СФЕР. Команда СФЕРА по-прежнему выступает операции для этих экспериментов. 31 января 2017 года космонавт ЕКА Томас Песке (рис.25) выполнил Недавние маневры Слоша раскрыли танковые маневры.Хотя механика жидкости динамика в условиях микрогравитации все еще малоизвестна, Slosh помогает предоставлять данные, представляющие большой интерес для НАСА и его отраслевых партнеров, в частности, исследовательская группа из KSC. Расследование Slosh будет значительно улучшить наше понимание того, как топливо в ракетах вести себя так, чтобы повысить безопасность и эффективность будущего автомобиля конструкции. Команда Slosh планирует запустить на МКС два новых танка с уникальное внутреннее жидкое пропеллентное покрытие для дальнейшего изучения этого явлений и проведет дополнительные сеансы испытаний с этими танками. без какого-либо другого оборудования.
Рисунок 25: Астронавт ЕКА Томас Песке выполняет ручные маневры различного назначения. Конфигурации бака для грязи перед камерами японского модуля (Изображение предоставлено NASA Ames)
• 16 декабря 2016 г .: Понимание динамики привязки для захвата незакрепленных объектов и «Космический буксир» погоня за машинами в невесомости поможет встретить цели демонстрационного проекта SPHERES Tether на борту МКС. Благодаря этой новой возможности команда SPHERES может улучшать компьютерные программы. и моделирование, необходимое для свободно летающих спутников SPHERES, чтобы удалить космический мусор и захват научных образцов с планетных объектов на будущие миссии в дальний космос.SPHERES Tether — это новый интегрированный полезная нагрузка, спроектированная и разработанная Airbus Defense and Space, в сотрудничество с НАСА и Массачусетским технологическим институтом. 39)
— После тщательного исследования и фазы разработки, оборудование Tether было запущено 8 апреля 2016 г. о миссии SpaceX 8 на МКС. 1 декабря экипаж 50-й экспедиции. члены Командующий Шейн Кимбро и астронавт ЕКА Томас Песке успешно выполнили тестовую сессию SPHERES Tether Checkout с двумя разные тросы — нейлоновая мононить и кевларовая нить.Несколько маневры были протестированы для измерения динамического отклика троса продольно подчеркнуты, и оценить динамику спутники буксируют под разными углами. Кимбро и Песке собраны данные об основных маневрах в дополнение к нескольким резервным маневры и маневры в реальном времени, которые дали дополнительную точку обзора системы Tether.
— Несколько цели были достигнуты во время этой тестовой сессии, в том числе: 1) демонстрация функциональности оборудования; 2) выполнено данные о динамике полета с шестью степенями свободы при буксировке одного спутника спутник-мишень в различных режимах запуска и управления; 3) оценка влияния материала троса, натяжения и крутящего момента между привязанные спутники.Всего было протестировано 31 маневр, и были записаны видео разрешения эксперимента, которые были дополнены по данным акселерометров, гироскопов и датчиков позиционирования каждый спутник СФЕРЫ. Помимо эффективности работы маневров, Кимбро и Песке работали вместе, чтобы вручную освободить спутники и управляйте ими через пользовательский интерфейс портативного компьютера. Эти задачи были критически важны для успешного завершения каждого запуска.
Рисунок 26: Командир Шейн Кимбро и астронавт ЕКА Томас Песке проводят тест на СФЕРАХ — Демонстрация привязки; Экспедиция 50 (кредит изображения: НАСА Эймса)
— После выпуска экипажем спутники перешли в режим автолокации и стабилизации на 30 секунд, за которым следует простое нажатие на компьютерную клавишу для входа в трос фаза динамики каждого маневра; в некоторых запусках эта операция случилась в среднем беге, что улучшило контрольные параметры маневра.В наличие троса между двумя СФЕРАМИ в сочетании с импульсивное толкание СФЕР могло вызвать периодические «подпрыгивания», которые могли Условия маневров неопределенные. По наблюдениям, члены экипажа может определить, когда тест был готов к запуску, или есть ли какие-либо корректировки были нужны.
— За последний год было обнаружил, что один из 12 двигателей спутника «Красные» СФЕРЫ был скомпрометирован. Эти маневры для точности и стабильности во время Выпуск спутников позволил улучшить науку и расход топлива (CO 2 ) для «Ред.»
— С успешный сбор данных и достижение целей тестирования, Команда SPHERES уверена, что анализ данных позволит Tether в будущем. наука со спутниками SPHERES и проверка компьютерных симуляций привязных космических систем.
• 28 сентября 2016 г .: Небольшой дрон научился определять расстояния, используя только один глаз во время испытаний на борту Международной космической станции, сообщают исследователи, поддерживаемые ЕКА. Хотя люди могут без труда оценивать расстояния одним глазом, у роботов по-прежнему нет этой возможности.«Это математический невозможность извлечения расстояний до объектов из одного изображения, если объект еще не встречался », — объясняет Гвидо де Крун из Делфтского технологического университета, один из исследователей. «Но если мы признаем что-то автомобилем, то мы знаем, что это физические характеристики, и мы можем использовать эту информацию для оценки это расстояние от нас. Похожая логика — это то, что мы хотели, чтобы дрон учимся во время нашего эксперимента. 40)
Рисунок 27: Фотография СФЕР дрон с камерой VERTIGO (фото предоставлено ЕКА, НАСА, Массачусетский технологический институт, Делфтский технологический университет)
— Один из резидентов дронов SPHERES на космической станции был принят на вооружение для испытаний.С 12 двигатели, работающие на углекислом газе, обеспечивающие вращение и движение во всех направлении, СФЕРЫ размером с шар для боулинга по существу свободно плавают мини-космический корабль на станции, используемый для тестирования самых разных технология.
— Для этого теста начался дрон перемещение внутри JEM (Японский экспериментальный модуль во время записи) информация стереозрения от двух камер «глаз» (Рисунок 28). Затем он начал узнавать о расстояния до стен и ближайших препятствий, чтобы при воспроизведении стерео камера была выключена, она могла начать автономное исследование используя только одну камеру.
— Работа в невесомости, с нет предпочтительного направления вверх или вниз, что усложняет задачу. Тем не менее эксперимент показал, что машинное обучение действительно позволит Обычно дрон стерео-просмотра восстанавливается после потери одной камеры. Программное обеспечение для самостоятельного обучения ранее было протестировано тщательно в TU Delft CyberZoo — исследовательской лаборатории для летающих и шагающие роботы — на квадрокоптерах.
— Эксперимент, представленный 27 Сентябрь на МАК (Международный астронавтический конгресс) в г. Гвадалахара, Мексика, отметила важный шаг в продолжающемся исследовании. усилия, основанные на передовых концепциях искусственного интеллекта, в сотрудничество между ESA, MIT (Массачусетский технологический институт) и Лаборатория микромеханических транспортных средств Делфтского технологического университета.
— «Было очень интересно увидеть дрон в космическом обучении с использованием передового искусственного интеллекта методы впервые », — объясняет Дарио Иззо, координация исследовательского вклада ESA Advanced Концепции Команда. «Наш подход, основанный на самостоятельном обучении, обладает высокой степенью надежности и способствует автономности дрона. Похожий подход к обучению был успешно применен к беспилотным автомобилям, задача где надежность также имеет первостепенное значение ».
— Леопольд Саммерер, возглавляющий Команда Advanced Concepts добавляет: «Это следующий шаг в нашем поиск по-настоящему автономных космических систем, которые все чаще используются потребность в исследованиях дальнего космоса, сложных операциях, для сокращения затраты, а также увеличивающиеся возможности и возможности науки.”
Рисунок 28: Фотография двуглазых СФЕР, плавающих в JEM — и обучающихся о расстояниях до стен и ближайших препятствий (фото предоставлено ESA, НАСА)
• Январь 2015 г .: На основе Миссия ЕКА «Розетта» и предстоящая миссия НАСА OSIRIS-Rex, Финалистам Zero Robotics было предложено смоделировать визуализацию виртуальный астероид на Международной космической станции 16 января 2015 года. Учащиеся средних школ со всей Европы контролировали миниатюру спутники на МКС в соревновании за лучшие снимки. 41)
— Космическая станция была превращена в игровое поле для финала. Конечная игра с роботами поставлена под сомнение молодежи писать алгоритмы, управляющие сферами, сокращение от Синхронизированное удержание позиции, включение, переориентация, экспериментальные спутники.
— 16 января 2015 г. был пятым время европейские соперники запускали свои команды в космосе, и каждый год конкуренция выросла. Более 140 европейских студентов присоединились к США, Мексиканские и российские конкуренты пишут код для изображения небесного мира. тело во время маневрирования из разрушительной виртуальной солнечной вспышки.
— встретились европейские и российские финалисты в Техническом центре ESA в Нидерландах, чтобы следить за конкуренция в прямом эфире из космоса. Соединились сборные США и Мексики через видеоконференцию в MIT (Массачусетский институт Технология).
— На станции, астронавт ЕКА Саманта Кристофоретти, астронавт НАСА Бутч Уилмор и космонавт Елена Серова наблюдала за роботизированным боем. Астронавт ЕКА Паоло Несполи и член экипажа НАСА Кэди Коулман также присутствовали на ESTEC и MIT. соответственно, поддерживая команды.
— Каждый финалист Альянс состоял из команд в основном из США и стран-членов ЕКА. В этом году впервые приняли участие представители России и Мексики. команды, что делает Zero Robotics поистине международным предприятием.
— Конкурс стартовал в прошлом году с онлайн-раунды возрастающей сложности. Команды столкнулись с реальным миром проблемы: им приходилось иметь дело с потерей сигнала, разряженными батареями и сжатые сроки. Долгие ночи программирования и множество дискуссий тактика между командами — все это часть игры.
— Приз чемпионата достался альянс под названием LakeElevenVadars — альянс, включающий Cora’s Eleven из Италии, которые приписывают свою победу к тому, чтобы им было доступно столько вариантов стратегии и кодирования, сколько возможно, до самой последней минуты перед крайним сроком подачи.
— На втором месте, впервые участники команды Zanneio Stardust из Греции. Вместе со своими США товарищи по команде, BACON и BRRobotics, они составили грозных противников на протяжении всего соревнования и проиграл в финале на волосок широта.
• Июль 2014: Cygnus CRS Полет Орб-2 к МКС (запуск 13 июля 2014 г.) включал также два Google прототипы смартфонов Project Tango, которые прикрепят космонавты к СФЕРАМ для демонстрации технологий внутри космической станции. Подключив смартфон к СФЕРАМ, он становится «Умными СФЕРАМИ», более «умный» свободно летающий робот со встроенными камерами, чтобы снимать фотографии и видео, датчики для проведения проверок, мощные вычислительные устройства для выполнения расчетов и подключения к Wi-Fi для передачи данные в реальном времени на компьютеры на космической станции и на Центр управления полетами в Хьюстоне. 42)
Рис. 29: НАСА / ARC Smart SPHERES, оснащенные смартфоном Google Project Tango (изображение предоставлено НАСА / ARC, Эрик Джеймс)
— В двухфазном эксперименте, космонавты будут вручную использовать смартфоны для сбора визуальных данных использование встроенного настраиваемого трехмерного датчика для создания полной трехмерной модели их окружение. После того, как карта и ее система координат будут разработано, второе мероприятие будет связано со смартфонами, подключенными к СФЕРЫ, становясь свободно летающими Умными СФЕРАМИ.Как свободно летающий роботы перемещаются по космической станции от путевой точки к путевой, используя трехмерную карту, они обеспечат ситуационную осведомленность члены экипажа внутри станции и авиадиспетчеры в миссии контроль. Эти эксперименты позволяют НАСА тестировать навигацию на основе зрения. в очень маленьком мобильном продукте.
— В конечном итоге это есть надежда исследователей, что эти устройства будут работать домашние задания, такие как видеосъемки для обеспечения безопасности и аудит конфигурации, измерение уровня шума, измерение расхода воздуха, и измерения качества воздуха, которые компенсируют работу космонавтов в настоящее время выполнять.
• 11 марта 2014 г .: в прорыв, который поможет космонавтам и роботам для совместной работы в глубоком космосе исследователи из Lockheed Martin ATC (Центр передовых технологий) в Пало-Альто, Калифорния, работает с НАСА астронавты на борту Международной космической станции продемонстрировали скоординированное управление роботами в космосе космонавтами в космосе и операторы на земле. Прорыв — первый в истории демонстрация таких совместных телеопераций. Маневры создавать новые возможности для расширения досягаемости людей и роботов миссии на околоземной орбите и за ее пределами. 43)
Астронавт Карен Нюберг и УВД инженер Умберто Ормено использовал разработанный ATC трехмерный пользовательский интерфейс для командуйте роботами НАСА СФЕРЫ на космической станции. Внутри космической станции, роботами командовали в Упражнения «следование за лидером» и моделирование маневры захода на посадку и стыковки, подобные тем, которые требуются для полета в космосе монтаж крупных космических сооружений и исследование астероидов. Там есть также гибкость внутри системы, что означает автоматическое управление одним или больше роботов можно комбинировать с ручным управлением другим.
Удаленное управление роботами в космос, или дистанционное управление, ставит несколько уникальных задач. Команды и телеметрия может занять от одной до трех секунд, чтобы путешествовать между космосом и земли через спутниковые реле, заставляя удаленных операторов прогнозировать последствия их действий с использованием старых данных. Разработаны деликатные компоненты невесомости могут быть повреждены случайными столкновениями или даже выхлопные газы, производимые другими спутниками, поэтому безопасное маневрирование существенный. Работа на космической станции демонстрирует, как бороться с временными задержками, связанными с передачей сигнала с земли.
Рис. 30: Этот групповой полет снимок СФЕР был сделан на борту МКС во время 16-й экспедиции Лабораторный модуль США Destiny (изображение предоставлено НАСА)
• фев. 25, 2014: Спутники SPHERES летают на борту Международная космическая станция с 2003 года. Работает от батареек типа АА. спутники действуют как свободно летающие платформы, на которых могут размещаться различные крепежные элементы и механизмы для проверки и проверки физические или механические свойства материалов в условиях микрогравитации. 44)
— МО Расследование «СФЕР-КОЛЬЦА» — первая демонстрация полет электромагнитных образований в условиях микрогравитации, а также беспроводная передача энергии в космосе. Исследование устанавливает высокоразвитые Звонит в существующие СФЕРЫ. Экипаж размещает кольца вокруг индивидуальный сателлит, состоящий из резонансных катушек, корпус катушки с вентиляторы, батареи и структура поддержки аппаратных средств. Проект «Кольца» демонстрирует использование электромагнитных катушек для маневрирования отдельных СФЕРЫ по отношению друг к другу.Ток, протекающий через кольцо катушек управляет сателлитами, так что два кольца снабжены СФЕРЫ способны притягивать, отталкивать и вращать.
— Использование электрически генерируемых сил и крутящих моментов предпочтительнее использования топлива, поскольку электричество может генерироваться солнечными батареями, но как только топливо израсходовано, миссия в общем кончено. Цели исследования SPHERES-Rings включают улучшенное характеристики ориентации между отдельными спутниками и возможность более эффективной передачи энергии на расстояние.Добавление эффективный способ передачи энергии между СФЕРАМИ может облегчить потребность для альтернативных источников питания. Эксперимент по беспроводной передаче энергии устанавливает оборудование, необходимое для потенциального питания в будущем космическая и городская робототехника и усовершенствованные системы связи в космосе, на суше или под водой.
Рис. 31: Астронавт Коичи Ваката проводит сеанс с парой СФЕР на борту МКС (изображение предоставлено НАСА)
• Февраль / март 2013 г .: Внутри лаборатории JEM / Kibo, астронавт НАСА Томас. Маршберн впервые работал с мячом размером с шар для боулинга. свободно летающие спутники СФЕРА-ВЕРТИГО, которые управлялись с земли. 45) 46) 47)
— The Расследование SPHERES-VERTIGO использует платформу SPHERES на МКС и является предназначен для демонстрации стереовизуального осмотра с целью оценки инспекция в непосредственной близости и навигация, в том числе счисление с помощью навигации и реперных точек (т. е. навигационный маркер слежения ассистировал) навигация и осмотр.
— Расследование СФЕР-ВЕРТИГО программное обеспечение включает навигацию и картографирование на основе компьютерного зрения алгоритмы, способные построить трехмерную карту другого объект и выполнение относительной навигации исключительно путем ссылки на этот трехмерная модель.
— Чтобы проверить эти алгоритмы, Аппаратная модернизация спутников на объекте СФЕРА включает камеры, модернизированный процессор, высокоскоростная система связи и дополнительные батареи.
Рис. 32: Астронавт НАСА Томас Маршберн проводит сессию продолжающегося расследования SPHERES-VERTIGO (изображение предоставлено НАСА)
• В начале 2012 года спутники SPHERES находятся в рабочем состоянии (т. Е. Используются для испытаний) на МКС (см.52). — На данный момент MIT провел 32 тестовых сеанса на борту МКС, охватывающих исследовательские темы, такие как сближение и стыковка, групповой полет, децентрализованное управление, реконфигурация спутников, инерциальная навигация и другие направления исследований. Кроме того, спутники SPHERES имеют использовался для национальных и международных соревнований по программированию STEM где ученики средних и старших классов запрограммировали СФЕРЫ спутники, находящиеся на орбите.
• Третий ежегодный конкурс Zero-Robotics SPHERES Challenge для старшеклассников проводился в Массачусетском технологическом институте 23 января 2012 года.Высокая В соревнованиях участвовали школьные команды из США и Европы. НАСА спонсировало Zero Robotics SPHERES Challenge в партнерстве с DARPA (Агентство перспективных оборонных исследовательских проектов) и Массачусетский технологический институт. В конкуренция согласуется с целью агентства поощрять студентов учиться и делать карьеру в STEM (наука, технологии, инженерия и математика). 48) 49) 50) 51)
Цель на этот год задача: студентам была дана «миссия» по программированию роботы искать, добывать (добывать полезные ископаемые) и возвращать альтернативу энергия вымышленных астероидов в глубоком космосе.Им дали координаты виртуальных астероидов, расположенных в пределах МКС, а затем разработать компьютерные коды, чтобы заставить робота работать, используя различные стратегии, каждая из которых заработала определенное количество баллов. В свободно плавающие спутники (2 СФЕРЫ) могут собирать инструменты при необходимости и начать добычу на одном из двух виртуальных астероидов.
Последние несколько месяцев студент команды тестировали свои коды в компьютерном моделировании, маневрируя виртуальных роботов и соревнования с другими командами в онлайн-играх.В финалисты — 38 команд с лучшими результатами моделирования — собраны в Массачусетском технологическом институте 23 января 2012 года, чтобы посмотреть их коды. разыграть настоящих роботов на МКС. Перед соревнованием у НАСА было загрузили программное обеспечение, разработанное студенческими командами-финалистами, на СФЕРЫ на МКС.
После успешного подключения НАСА Зал MIT с МКС, большой экран в передней части зала спроектировал вид в реальном времени изнутри станции. Астронавт Дон Петтит, на борту МКС, ответил: «Мы слышим вас громко и отчетливо, Массачусетский технологический институт.»- Дон Петт и Андре Кейперс создали индивидуальные матчи в японской лаборатории Кибо в космосе Вокзал и наслаждался зрелищем. Они председательствовали на мероприятии и собрали данные из контролируемых студентами полетных программ SPHERES после каждый этап конкурса.
Несмотря на несколько глюков в видео feed, большинство команд смогли наблюдать за своими алгоритмами в действии. В течение в каждом матче и красная, и синяя СФЕРА начали свои миссии одновременно, медленно кружа друг над другом и перемещаясь по модулю согласно их заранее запрограммированным траекториям.
Команды «Alliance Rocket» из США и виртуальные участники «Alliance CyberAvo» из Европы были названы победителями в третьем ежегодном конкурсе Zero Robotics SPHERES Challenge.
Всего в мероприятии SPHERES приняли участие 38 команд. Обе группы-победители состояли из трех команд:
— Команды, которые составили «Альянс Ракета» — это Team Rocket, средняя школа Ривер-Хилл, Кларксвилл, Мэриленд; Защищая чемпионов, Штурмовые роботы, Бранчбург, Нью-Джерси; и СФЕРА Влияния, Рокледж Хай Школа / округ Бревард, Флорида.
— «Альянс CyberAvo» состояла из CyberAvo, I.T.I.S. Амедео Авоградо, Турин, Италия; Ультима, Kaethe Kollwitz Oberschule, Берлин, Германия; и Ленивый, Генрих Герц Гимназия, Берлин, Германия.
Рисунок 33: Астронавты Дон Петтит (слева) и Андре Кейперс (справа) наблюдают, как два робота СФЕРЫ выполнять свои операции в рамках конкурса SPHERES Zero-Robotics Challenge (Изображение предоставлено: ЕКА, НАСА, Массачусетский технологический институт)
• В ноябре 2011 г. Спутники SPHERES модернизированы на «готовые» смартфоны с помощью «порта расширения» команда MIT разработан в каждом спутнике.Поскольку СФЕРЫ изначально были предназначены для другой цели, они нуждались в некоторых обновлениях, чтобы стать дистанционно управляемые роботы. Подключив смартфон, проект может сразу сделай СФЕРУ умнее. Со смартфоном СФЕРЫ будут иметь встроенную камеру для фото- и видеосъемки, сенсоры. чтобы помочь в проведении проверок, мощный вычислительный блок, чтобы сделать расчеты и подключение Wi-Fi (Wireless Fidelity), которое проект будет использовать для передачи данных в реальном времени на космическую станцию и управление полетами.- n для того, чтобы сделать использование смартфонов на борту более безопасным. станции, чипы сотовой связи были удалены, а литий-ионный аккумулятор был заменен на щелочные батареи AA.
До недавнего времени тесты SPHERES использовали заранее запрограммированные алгоритмы для выполнения конкретных функции. Космическая станция — это лишь первый шаг к удаленному использованию управляемые роботы для поддержки исследований человека.
Испытав спутники СФЕРЫ, НАСА может продемонстрировать, как умные СФЕРЫ могут работать удаленно. управляемые помощники космонавтов в космосе.НАСА планирует дополнительные тесты, в которых компактные помощники будут выполнять внутренние станции опросы и инспекции, а также съемка изображений и видео с помощью камеру смартфона. Дополнительные цели миссии включают: моделирование бесплатных экскурсий и, возможно, других, не только сложные задачи. 52)
• СФЕРА работала на борту МКС с мая 2006 года. Долгосрочная программа продолжает обеспечивать ценная информация для ученых из лаборатории космических систем Массачусетского технологического института и множество приглашенных ученых из других организаций.Главная вехи 2006 года были достигнуты в продвижении и демонстрации алгоритмов стыковки.
• На протяжении 2007 и 2008 гг. СФЕРЫ исследований расширены за счет включения существенных алгоритмы полета (таблица 5). 53) 54)
TS (тестовая сессия) | Дата | Конфигурация / цель науки |
7 | 24 марта 2007 г. | Затерянный в космосе 2 сб., Групповой полет 3 сб. |
8 | 27 апреля 2007 г. | 3-Sat Formation Flight |
10 | 12 декабря 2007 г. | Инициализация формирования 2-Sat и разброс |
11 | 27 января 2008 г. | Инициализация формирования 2-Sat и разброс |
12 | 30 августа 2008 г. | Спиральные образования 2-Sat |
13 | 27 сентября 2008 г. | Предотвращение столкновений за 3 спутника |
14 | окт. / Нояб.2008 г. | Моделирование отказов связи и двигателя в 3 спутниках, спиральные образования в 2 спутниках |
Таблица 5: Обзор тестовых сессий (TS) SPHERES на МКС с целями исследования полета формации
Трехспутниковый групповой полет В TS7 начались эксперименты с основными круговыми формациями. Исследование затем вырос в два основных направления: управление вращающимися формациями и алгоритмы, обеспечивающие автономность распределенных спутниковых систем.An обширный набор алгоритмов был разработан исходя из необходимости спутниковые формирования для перенастройки в соответствии с оперативными целями и статус отдельных спутников.
Разработки СФЕР включают задачи по четырем основным направлениям:
• Визуальные маневры: создание кругов и спиралей для моделирования движения разнесенных потенциалов радар / телескопы космических аппаратов.
• Приобретение формации: алгоритмы инициализации формации из случайных начальных условий, включая алгоритмы «затерянного в космосе», оптимальное соединение существующая формация и случайный выбор лидера формации.
• Поддержание формации: реконфигурация геометрии, предотвращение столкновений на низком уровне, использование различная информация датчика, а также переключение между относительным и абсолютные системы отсчета.
• Обнаружение неисправностей и восстановление: реконфигурация после (смоделированного) отказа спутника (датчики, исполнительные механизмы и / или средства связи), разброс оперативных спутники, чтобы избежать выхода из строя спутника.
Формирование СФЕР 2007 и 2008 гг. боевые тесты сконцентрированы на маневрах визуализации и алгоритмах автономности.Для маневров визуализации использовался широкий спектр контроллеров: PID (Пропорциональная интегральная производная), LQR (линейно-квадратичный регулятор), и циклическое преследование. Использование базовых ПИД-регуляторов по кругу было достаточный. Но контроллеры LQR не обеспечивали приемлемой производительности по спирали, показывая необходимость использования более сложных контроллеров в качестве динамика спиралей не оказалась простым продолжением круговой движение. Использование децентрализованного контроллера привело к лучшему производительность, чтобы следовать по спирали (см.53).
Автономия алгоритмы охватывают широкий спектр возможных действий, которые необходимо предпринять распределенной спутниковой системой. Инициализация формации из случайного тесты условий развертывания позволили группе идентифицировать несколько потенциальные проблемы, которые могут привести к сбою алгоритма; эти проблемы иногда напрямую связаны с алгоритмом (например, потенциально без формирования «лидера»), а также из других частей спутник (например, потеря связи).
Уроки, извлеченные из разработка алгоритмов маневра рассеяния включает несколько очевидных необходимо полностью идентифицировать ваше окружение, но также и важность маневр рассеивания для динамического определения направления рассеивания.Все спутники должны двигаться в противоположных направлениях друг от друга, скорее чем перейти в заранее определенное «безопасное» место.
Испытания на предотвращение столкновений продемонстрировали способность использовать процесс с низкими накладными расходами для включения этого автономное поведение в системах космических аппаратов. Испытания предоставили исходные данные, чтобы полностью понять эмпирическую взаимосвязь между эксплуатационный шум (т. е. отклонения от идеального пути) и «Сейф» вокруг физической системы.
Команда SPHERES предложила два различные методы восстановления системы полета формации возможные отказы одного из спутников.Для связи отказ, при котором отказавший спутник, как ожидается, сможет остановить свой движение, предлагаемое восстановление заключается в изменении плоскости формации. В случае отказов подруливающих устройств команда предлагает использовать маневр рассеивания. необходимо для защиты работающих спутников. Отказ подруливающего устройства Имитационный тест продемонстрировал справедливость маневра рассеяния для этот тип отказа.
• Тестовая сессия SPHERES 12 было совершено 30 августа 2008 г. на борту Международного космического корабля. Станция астронавта НАСА Грега Чамитоффа.Эта тестовая сессия включены тесты на непрерывный маневр спирали. Визуальный осмотр реальное видео, предоставленное НАСА в тот же день тестовой сессии, доказали правильность поведения алгоритма планирования траектории и возможность реализации такого рода согласованных траекторий в космос.
Рис. 34: Астронавт Грегори Чамитофф, выпускник Массачусетского технологического института, посещает летные испытания формации СФЕРА (изображение предоставлено MIT)
1) С.- Дж. Чанг, Д. Адамс, А. Саенс-Отеро, Э. Конг; Миллер Д. Лейзавиц, Э. Лоренцини, С. Селл, «Привязанная СФЕРА формация. Стенд для летных испытаний: достижения в выполнении миссии НАСА SPECS », Труды Астрономических телескопов и приборов SPIE Симпозиум, Орландо, Флорида, май 2006 г., доклад SPIE 6268-11, «Достижения в Звездная интерферометрия, URL: http://ssl.mit.edu/spheres/library/spie_tether_2006.pdf
2) А. Саенс-Отеро, Д. Миллер, «Лаборатория SPHERES ISS для Свидание и построение полета », 5-я Международная конференция ESA. Конференция по системам навигации и управления, Фраскати, Италия, Октябрь22-25, 2002, СП-516
3) Д. В. Миллер, Э. М. К. Конг, А. Саенс-Отеро, «Обзор Лаборатория рандеву и стыковки СФЕР в международном космосе Станция », Труды 26-й конференции AAS по наведению и Control, Брекенридж, Колорадо, 5–9 февраля 2003 г., Vol. 113, Достижения в Астронавтические науки, под редакцией И. Дж. Гравсета и Р. Д. Калпа, AAS-03-013, стр. 155-169
4) С.-Дж. Чанг, Э. М. Конг, Д. В. Миллер, «Динамика и управление Привязанный космический аппарат для полетов с использованием испытательного стенда SPHERES », Материалы конференции AIAA по наведению, навигации и управлению и выставка, Сан-Франциско, Калифорния, США, август.15-18, 2005, AIAA 2005-6089, URL: http://ssl.mit.edu/spheres/library/gnc2005tether.pdf
5) http://ssl.mit.edu/spheres/index.html
6) А. Саенс-Отеро, Д. В. Миллер, «Использование МКС для разработки технологии телескопов», URL: http://ssl.mit.edu/spheres/library/ISS.pdf
7) Д. Миллер, Д. Ньюман, Дж. Де Луис, «Синхронное положение, удерживайте, Включение и изменение ориентации экспериментальных спутников (СФЕРЫ), испытательное оборудование Пакет данных », 23 марта 2000 г.
8) А. Саенс-Отеро, Д.Миллер, «СФЕРЫ: платформа для Формационно-летные исследования », Труды ШПИЭ, Вып. 5899, г. С. 230-240 (2005), « Космические телескопы УФ / оптического / ИК-диапазона: инновационные Технологии и концепции II, Сан-Диего, Калифорния, август 2005 г., URL: http://ssl.mit.edu/spheres/library/SPH.pdf
9) Дж. Энрайт, М. Хильстад, А. Саенс-Отеро, Д. Миллер, «СФЕРЫ Программа приглашенных ученых: совместная наука на МКС », Материалы конференции IEEE Aerospace 2004, Big Sky, MT, 6-13 марта, 2004
10) С.У. Селл, С. Э. Чен, «СФЕРЫ: Дизайн летающей формации. Испытательный стенд для МКС », Труды IAF, 34-я конференция COSPAR Scientific. Ассамблея, Второй Всемирный космический конгресс, 10-19 октября 2002 г., Хьюстон, Техас, США
11) А. Чен, А. Саенс-Отеро, М. Хильстад, Д. Миллер, «Развитие Построение полета и алгоритмы стыковки с использованием СФЕР Испытательный стенд », 15-я ежегодная конференция AIAA / USU по малым спутникам, Университет штата Юта, Логан, Юта, 13-26 августа 2001 г., SSC01-VIIIa
12) Д. Миллер, А.Саенс-Отеро, Дж. Вертц, А. Чен, Г. Берковски, К. Бродель, С. Карлсон, Д. Карпентер, С. Чен, С. Ченг, Д. Феллер, С. Джексон, Б. Питтс, Ф. Перес, Дж. Шумински, С. Селл, «СФЕРЫ: Испытательный стенд для Формирование длительных спутников, летающих в условиях микрогравитации Условия ». Труды Механики космического полета AAS / AIAA. Встреча, Клируотер, Флорида, США, 23-26 января 2000 г., AAS 00-110, URL: http://ssl.mit.edu/spheres/library/AAS-AIAA.pdf
13) http://ssl.mit.edu/spheres/library/SPHERES_0-1-2_SDP_A.pdf
14) Д. Берковиц, Э. Конг, Д. Миллер, «Системная идентификация Автономный стенд для сближения и стыковки СФЕРЫ », Космос 2003, г. 23-25 сентября 2003 г., Лонг-Бич, Калифорния, США, AIAA 2003-6385
15)
Р. Лим, Д. Миллер, «Поэтапный контроль точки зрения метрологии.
и параметрическое интегрированное моделирование для космических оптических
Системы », диссертация в Массачусетском технологическом институте, май 2006 г., URL: http://ssl.mit.edu
/publications/theses/SM-2006-LimRyan.pdf
16) Э. М. Конг, А. Саенс-Отеро, С.Нолет, Д. С. Берковиц, Д. В. Миллер, С. У. Селл, «СФЕРЫ как разработка алгоритма полета формации и Стенд для валидации: текущий прогресс и перспективы », URL: http://ssl.mit.edu/spheres/library/SPHERESFFPaper72.pdf
17) Амер Фейзич, Саймон Ноле, Луи Брегер, Джонатон П. Хау, Дэвид В. Миллер, «Результаты автономной стыковки SPHERES в условиях микрогравитации. Эксперименты при наличии аномалий ». 59-й МАК (Международный астронавтический конгресс), Глазго, Шотландия, Великобритания, СентябрьС 29 по 3 октября 2008 г., IAC-08.C1.5.1
18) Саймон Нолет, Альвар Саенс-Отеро †, Дэвид В. Миллер, Амер Фьезич, «Операции SPHERES на борту МКС: созревание GN&C» Алгоритмы в условиях микрогравитации », Труды 30-го ежегодного AAS. Конференция по наведению и контролю, Брекенридж, Колорадо, США, 3-7 февраля 2007 г., AAS 07-042
19) http://science.nasa.gov/headlines/y2006/01jun_spheres.htm
20) http://ssl.mit.edu/spheres/news.html
21) Дж. Энрайт, М. Хильстад, А.Саенс-Отеро, Д. Миллер, «СФЕРЫ Программа приглашенных ученых: совместная наука на МКС », IEEE. Аэрокосмическая конференция 2004 г., Биг Скай, Монтана, 6-13 марта 2004 г., доклад № 1296
22) А. Саенс-Отеро, Д. В. Миллер, «Начальные операции СФЕР на борту. Международная космическая станция », Труды 6-го МАА. Симпозиум по малым спутникам наблюдения Земли, Берлин, Германия, 23 — 26 апреля 2007 г.
23) М. О. Хильстад, Дж. П. Энрайт, А. Г. Ричардс, «Гость SPHERES» Программа для ученых », документация Массачусетского технологического института, октябрь.29, 2003 г., URL: http://ssl.mit.edu/spheres/gsp/
24) Д. П. Шарф, Ф. Я. Хадаег, С. Р. Плоен. «Обзор космических аппаратов. Формирование наведения и управления полетом. Часть I: Руководство », Труды Американской конференции по контролю, Vol. 2. С. 1733-1739, 4-6 июня 2003 г., Денвер, Колорадо, США
25) Г. С. Ауд, Дж. П. Хау, Д. В. Миллер, «Маневр реконфигурации. Эксперименты с использованием испытательного стенда SPHERES на борту МКС », Материалы 3-го Международного симпозиума по групповому полету, Миссии и технологии, ESA / ESTEC, Нордвейк, Нидерланды, апрель 23-25, 2008
26) Альвар Саенс-Отеро, Джейкоб Кац, Свати Мохан, Дэвид Миллер, Грегори Э. Шамитофф, «ZERO-Robotics: студенческое соревнование на борту Международная космическая станция », Труды IEEE 2010 г. Аэрокосмическая конференция, Big Sky, MT, США, 6-13 марта 2010 г.
27)
Брент Э.Твиддл, Элиас Мюгглер, Альвар Саенс-Отеро, Дэвид В.
Миллер, «Очки SPHERES VERTIGO Goggles: картографирование на основе зрения и
локализация на борту Международной космической станции »,
Труды i-SAIRAS (Международный симпозиум по искусственному
Разведка, робототехника и автоматизация в космосе), Турин, Италия, сент.
4-6, 2012 г., URL: http://robotics.estec.esa.int/
i-SAIRAS / isairas2012 / Papers / Session% 204B / 04B_02_tweddle.pdf
28)
Брент Э. Тведдл, «Программа SPHERES VERTIGO: основанная на видении.
Навигационные исследования на борту Международной космической станции »,
IEEE IRCA (Международная конференция по робототехнике и автоматизации),
Шанхай, Китай, 9–13 мая 2011 г., URL: http: // ewh.ieee.org/conf/icra/
2011 / семинары / SpaceRobotics / abstracts / Abstract_Tweddle.pdf
29) Альвар Саенс-Отеро, «СФЕРЫ — созревание автономных свиданий». И алгоритмы стыковки со СФЕРАМИ на борту МКС », IEEE ICRA 2012 г., Семинар по спутниковому обслуживанию, Сент-Пол, Миннесота, США, 14-18 мая 2012 г., URL: http://wnrc.dyndns.org/ICRA2012/presentations/Saenz-Otero_ICRA2012_RSS_Workshop.pdf
30) Дженнифер Чу, «Обновление исследования: СФЕРЫ, чтобы получить мощные магниты и защитные очки», MIT News Office, август.02, 2012, URL: http://web.mit.edu/newsoffice/2012/
research-update-spheres-satellites-get-camera-magnets-0802.html
31) Сунил Чинталапати, Чарльз А. Холикер, Ричард Э. Шульман, Брайан Д. Мудрый, Габриэль Д. Лапилли, Гектор М. Гутьеррес, Даниэль Р. Кирк, »Обновление SPHERES Slosh для сбора данных Liquid Slosh на борту МКС », 49-я совместная двигательная установка AIAA / ASME / SAE / ASEE. Конференция, 14–17 июля 2013 г., Сан-Хосе, Калифорния, США, URL: http://my.fit.edu/~chintals/index_files/2013-3903.pdf
32) Габриэль Лапилли, Ричард Шульман, Чарльз Холикер, Брайан Уайз, Сунил Чинталапати, Гектор Гутьеррес, Даниэль Кирк, Пол Шаллхорн, Брэндон Марселл, Джейкоб Рот, Дастин Хейхерст, Дэвид Миллер, Альвар Саенс-Отеро, ”Поведение жидкости в условиях микрогравитации применительно к Двигательные установки космического корабля », ААС 3-й МКС Исследовательской и Конференция разработчиков — Чикаго, штат Иллинойс, США, 21 июля 2014 г., URL: http://www.astronautical.org/sites/default/files/attachment/AAS_SLOSH_ISS2014_Final.pdf
33) Габриэль Лапилли, Даниэль Кирк, Гектор Гутьеррес, Пол Шаллхорн, Брэндон Марселл, Джейкоб Рот, Джеффри Модер », Результаты динамика жидкости в условиях микрогравитации, захваченная с помощью SPHERES-Slosh Эксперимент », Материалы 66 -го Международного астронавтического конгресса (IAC 2015), Иерусалим, Израиль, 12–16 октября 2015 г., статья: IAC-15-A2.6.2
34) Габриэль Лапилли, Чарльз Холикер, Гектор Гутьеррес, Даниэль Кирк, ”Дизайн эксперимента по выплескиванию жидкости для работы в Международная космическая станция »51 с тонн Совместная конференция по двигательным установкам AIAA / SAE / ASEE, AIAA 10.2514 / 6.2015-4074, 27-29 июля 2015 г., Орландо, Флорида, США
35) «Основные научные данные космической станции: неделя с 7 сентября 2020 г.», НАСА, 11 сентября 2020 г., URL: https://www.nasa.gov/mission_pages/station/research/news/space-station-science-highlights- 07 сен20
36) «Насколько сильно колеблется жидкость при перемещении в космосе?», ESA Enabling & Support, 31 июля 2020 г., URL: https://www.esa.int/Enables_Support/Space_Engineering_Technology
/ Shaping_the_Future / How_much_does_liquid_wobble_in_when_master
37)
»Статус космической станции НАСА на орбите 31 января 2018 г. — СФЕРЫ
Снова в действии », Отчет о статусе SpaceRef, 1 фев.2018, URL: http://spaceref.com/international-space-station/
nasa-space-station-on-orbit-status-31-january-2018 — spheres-back-in-action.html
38)
”SPHERES бьет собственный рекорд самого высокого рабочего темпа в
Поддерживаемая деятельность Международной космической станции », НАСА, 7 марта.
2018, URL: https://www.nasa.gov/content/
spheres-shatters-own-record-for-high-operating-tempo-in-supported-international-space
39) «SPHERES Tether демонстрирует захват космического мусора», НАСА, 16 декабря.2016 г., URL: https://www.nasa.gov/content/spheres-tether-demonstrates-capture-of-space-debris
40) «Одноглазый робот учится видеть в невесомости», ESA, 28 сентября 2016 г., URL: http://m.esa.int/Our_Activities/Space_Engineering_Technology
/ One-eyed_robot_learns_to_see_in_weightlessness
41) «Заключение SPHERES Zero Robotics Challenge 2014», ESA, 19 января 2015 г., URL: http://www.esa.int/Education/Conclusion_of_SPHERES_Zero_Robotics_2014_challenge
42) Мария Альберти, «Астронавты для тестирования свободно летающих роботов-домработниц», NASA / ARC, 17 июля 2014 г., URL: http: // www.nasa.gov/ames/astronauts-to-test-free-flying-housekeeper-robots/
43)
«Исследователи Lockheed Martin достигли прорыва в робототехнике для
Исследование космоса », Lockheed Martin, 11 марта 2014 г., URL: http://www.lockheedmartin.com/us/news
/press-releases/2014/march/0310-ss-robotics.html
44) «СФЕРЫ НАСА вращаются вокруг обычных спутников», Технические сводки НАСА, 25 февраля 2014 г., URL: http://www.techbriefs.com/component/content/article/19153
45) «Основные моменты ведущего ученого за февраль.25, 2013 », НАСА, 8 марта 2013 г., URL: http://www.nasa.gov/mission_pages/station/research/news/wklysumm_week_of_feb25.html
46) «Синхронизированное положение, удержание, задействование, переориентация, эксперимент. Спутники — ВЕРТИГО (СФЕРЫ-ВЕРТИГО) », НАСА, 25 февраля 2013 г., URL: http://www.nasa.gov/mission_pages/station/research/experiments/869.html
47) Деханн Фурье, «VERTIGO — Vision-based Navigation and Mapping of an object», Массачусетский технологический институт, 14 марта 2013 г., URL: http://files.meetup.com/4379272/2013-03-14-BCV_vertigo_MRG.pdf
48) Энн Мари Тротта, «Победители конкурса Zero Robotics Challenge определены в соревновании высоких технологий», НАСА, 24 января 2012 г., URL: http://www.nasa.gov/home/hqnews/2012/jan/HQ_12-029_SPHERES_Challenge_Winner .html
49) Дженнифер Чу, «Роботы идут лицом к лицу на высоте 250 миль над Землей», 50) «Соревнования роботов в невесомости», ESA, 25 января 2012 г., URL: http: // www.esa.int/esaCP/SEMN6SH8RXG_index_0.html 51)
Шриджа Наг, Ира Хеффан, Альвар Саенс-Отеро, Майк Лайдон, «СФЕРЫ
Разработка программного обеспечения Zero Robotics: уроки краудсорсинга и
Совместное соревнование », Материалы IEEE 2012 г.
Аэрокосмическая конференция, Биг Скай, Монтана, США, 3-10 марта 2012 г. 52) Рэй Сандерс, «НАСА передает« Силу »с помощью умных сфер», «Вселенная сегодня», 5 января 2012 г., URL: http://www.universetoday.com/92381/nasa-channels-the-force-with -смарт-сферы / 53)
Альвар Саенс-Отеро, Джейкоб Кац, Дэвид В.Миллер, «СФЕРЫ
Демонстрация спутниковых формирований на борту МКС »,
Материалы 32-й конференции по наведению и контролю AAS,
Брекенридж, Колорадо, США, 31 января — 4 февраля 2009 г., AAS 09-011 54) М.
Дияз-Агило, К. Мэнди, А. Саенс-Отеро, Д. Миллер, «Оптимальный
Интерферометрические маневры для распределенных телескопов »,
Труды 60-го МАК (Международного астронавтического конгресса),
Тэджон, Корея, 12–16 октября 2009 г., IAC-09.A3.4.7 Информация, собранная и отредактированная в этой статье, предоставлена Herbert
Дж.Крамер из его документации: «Наблюдение Земли.
и его окружение: обзор миссий и датчиков »(Springer
Верлаг), а также многие другие источники после публикации 4-го
выпуск 2002 года. — Комментарии и исправления к этой статье всегда
приветствуем дальнейшие обновления ([email protected]). Запуск космического корабля VERTIGO Информация о статусе миссии Вернуться к началу Приносим извинения за неудобства, но страница, к которой вы пытались получить доступ, находится не по этому адресу.Вы можете использовать приведенные ниже ссылки, чтобы помочь вам найти то, что вы ищете. Если вы уверены, что имеете правильный веб-адрес, но столкнулись с ошибкой, пожалуйста,
связаться с Администрацией сайта. Спасибо. Серия 400 — Директивы, указания и указания Министерства энергетики США
Возможно, вы искали…