
АВТОРОТАЦИЯ
АВТОРОТАЦИЯАВТОРОТАЦИЯ
Когда в полете шум двигателя вертолета неожиданно затихает, и остается только звук ветра, его экипаж не надевает судорожно парашют и не дергает за стартовый рычаг катапульты. В вертолете это не поможет, да и высота часто мала для прыжков. Пилот, не теряя самообладания, переводит вертолет в режим авторотации и пытается спасти машину от катастрофы. Коптеры не самолеты, они не умеют планировать, и аэродинамика вертолета без работающего двигателя ничем не отличается от утюга. Что же такое авторотация?
Всем
наверное известен эффект флюгера,
помните такую детскую игрушку?
Полоска бумаги, надорванная
пополам вдоль до середины с
отогнутыми половинками в форме Y.
Бумажный такой вертолетик. Кидаешь
его с высоты, он крутится и медленно
опускается вниз. За счет этого же
эффекта и происходит авторотация.
У вертолета соотношение массы и размеров лопастей совершенно отличается от бумажного аналога. И если оставить процесс падения на самотек, то установившаяся скорость падения будет сильно велика, так что при ударе об землю смертей не избежать. Чтобы замедлить падение, приходится делать так:
1) Первым делом войдем в режим авторотации. Ни к чему ротору зря ворочать двигатель, с толкача не заведется, по этому отпустим ось ГР, убрав, если можно так выразиться, сцепление. В разных вертолетах это выполнено конструктивно по-разному.
2)
Раскрутка. Раскручиваем ротор,
увеличивая шаг, тогда винт будет
больше «загребать» воздух и
раскручиваться. На стадии
раскрутки два важных фактора,
определить установившуюся
скорость падения и запас высоты для
торможения. Скорость падения
должна быть такой, чтобы при
«затяжелении» винта при
посадке, он конструктивно выдержал
и не разрушился.
3) Посадка. Резко уменьшаем шаг винта, «затяжеляем» его. На таких углах атаки лопастей главный ротор превращается в псевдо-крыло и работает как парашют. Так как он накопил кинетическую энергию при раскрутке, он замедлится не сразу, и будет создавать подъемную силу, пока не затормозится. Вследствие этого вертолет значительно уменьшит скорость падения, не совсем конечно, чтоб зависнуть, закон сохранения энергии не перехитрить, но достаточно, чтобы совершить вынужденную посадку и не разбиться. Иногда стадия раскрутки не нужна, особенно если вертолет легкий.
Теперь
можно расслабиться и считать ушибы,
ссадины и переломы. Если все
сделать правильно — можно
отделаться лишь этим. При
авторотации редко удается избежать
травм, если конечно не повезет
упасть на густой лес или болото. Хотя я знал одного вертолетчика,
который 3 раза садился на
авторотации на Ми-2 и каждый раз
после больницы возвращался в строй.
Хотя я знал одного вертолетчика,
который 3 раза садился на
авторотации на Ми-2 и каждый раз
после больницы возвращался в строй.
А теперь
обломы нашего городка. Вы, наверное,
потираете ручки в предвкушении
посадок на авторотации в MSFS 98, ан
нет, программисты из Мелкософта не
предусмотрели такой режим.
Двигатель в нем выключается лишь
при сбросе газа и шага до нуля, а
отключение его из меню не
предусмотрено, будем надеяться, что
в следующей версии симулятора
будет предусмотрена авторотация
или может какой-нибудь патч выйдет.
Следующий облом. Мы забыли, что
хвостовой ротор тоже не работает в
нормальном режиме, так как он через
вал соединен с двигателем. По этому
при падении нужно учитывать
вращение вертолета, чтобы не
завалиться в штопор, из которого
выхода уже не будет. Этого можно
попытаться избежать, наклонив ГР
так, чтобы он компенсировал
отсутствие ХР.
Замечу, кстати, что в военных вертолетах в настоящее время устанавливают катапультируемые кресла, и механизмы отстрела лопастей, так как они работают на малой высоте и не могут успеть сесть на авторотации, либо могут повредить лопасти, что тоже исключает возможность благополучной посадки.
Во многих странах лицензии на полеты в городах получают лишь вертолеты с двумя двигателями, причем требуется, чтобы при одном двигателе он мог реализовывать зависание при полной предусмотренной загрузке.
В общем, облизывайтесь (или ужасайтесь), господа вертолетчики. Авторотация не для слабонервных. Если кто, кстати, умудрится в 98-м изобразить авторотацию, пишите.
Сайт создан в системе uCozАвторотация — это.
 .. Что такое Авторотация?
.. Что такое Авторотация?Авторотация (др.-греч. αὐτός — сам; лат. rotatio — вращение) — режим вращения воздушного винта летательного аппарата или турбины двигателя, при котором энергия, необходимая для вращения, отбирается от набегающего на винт потока. Термин появился между 1915 и 1920 годами в период начала разработок вертолётов и автожиров и означает вращение несущего винта без участия двигателя.
На самолётах, использующих в качестве движителя воздушные винты без изменяемого шага, авторотация винта (вращение от набегающего потока) возникает при отказе или выключении двигателя в полёте. При этом возникает сильное сопротивление потоку и, в случае отказа одного двигателя на консоли крыла, сильный разворачивающий и кренящий момент, что существенно усложняет управление летательным аппаратом и может привести к его падению. Для предотвращения этого неприятного явления все современные турбовинтовые двигатели имеют системы автоматического и ручного флюгирования, в случае остановки двигателя в полёте устанавливающие (поворачивающие) лопасти воздушного винта «по потоку».
Ротор турбореактивных двигателей в случае их выключения в полёте также может вращаться от набегающего потока в режиме авторотации.
Для вертолётов в отечественной практике для обозначения авторотации несущего винта установился термин «самовращение несущего винта» (СНВ). При штатном полёте вертолёта, с включённым двигателем, воздушный поток поступает сверху и выходит снизу — несущий винт работает в режиме «пропеллер». В режиме СНВ несущий винт вертолёта раскручивается от встречного набегающего потока, одновременно создавая подъёмную силу. Авторотация возможна потому, что несущий винт оказывается при таком обтекании в режиме «ветряка». Для снижения механических потерь в режиме СНВ между двигателем и несущим винтом установлена обгонная муфта (существуют несколько её конструктивных решений).
Например, на вертолете Ми-8 обгонные муфты установлены между свободной турбиной и главным редуктором. Поэтому в режиме СНВ от несущего винта приводятся во вращение главный редуктор, который раздает крутящий момент на хвостовой винт, насосы гидросистем и генератор переменного тока (и некоторые другие агрегаты вертолета). Вертолет сохраняет управляемость и питание пилотажных приборов кабины.
Используя авторотацию, вертолёт может произвести безопасную посадку при отказе одного или двух двигателей, поэтому возможность безопасной посадки на авторотации является обязательной для прохождения сертификации производителями вертолётов.
Режим авторотации является рабочим для автожира. Поляра вращающегося несущего винта автожира очень похожа на поляру крыла, поэтому полет на автожире по технике пилотирования больше напоминает полет на самолете, чем на вертолете.
Самая длительная авторотация в истории была выполнена Жаном Буле (фр. Jean Boulet) в 1972 году, когда он достиг рекордной высоты 12’440 м на вертолёте Aérospatiale Lama.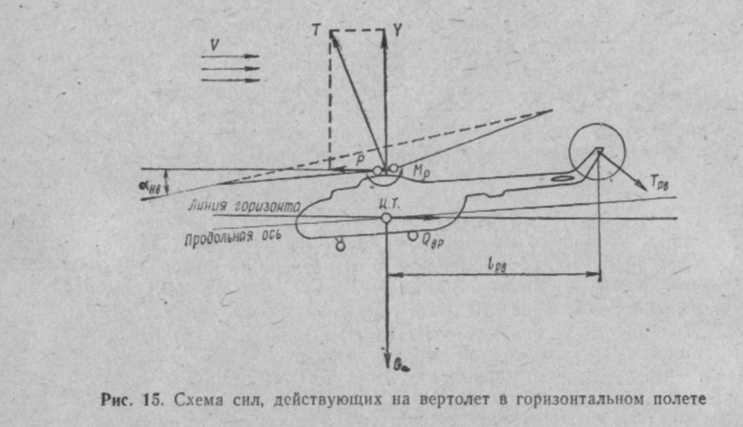
Использование
Обтекание несущего винта воздушным потоком: вверху- нормальный полет, внизу-авторотация.На вертолётах наиболее частая причина использования авторотации — это неисправность двигателя, но авторотация также может использоваться и в случае полного отказа рулевого винта, поскольку при авторотации отсутствует реактивный момент, создаваемый несущим винтом. В некоторых экстремальных ситуациях авторотация может использоваться для выхода из вихревого кольца, если позволяет высота.
На одновинтовых вертолётах при отказе двигателя несущий винт, продолжая двигаться по инерции, какое-то время будет по прежнему создавать подъёмную силу. Действия пилота при отказе одного или обоих двигателей в первую очередь зависят от направления вращения несущего винта. Например, при правом вращении несущего винта, в момент отказа двигателей, тангаж вертолета самопроизвольно увеличивается, с разворотом по рысканию влево.
 Установившаяся скорость вертикального снижения составляет приблизительно 25-30 м/с и зависит от модели вертолёта и факторов, описанных выше. Такая скорость не может быть погашена только за счет инерции несущего винта и при отсутствии достаточной для набора горизонтальной скорости высоты посадка невозможна. Военные вертолёты работают на малой высоте, поэтому для спасения экипажа иногда устанавливают катапультируемые кресла и предусматривают отстрел лопастей несущего винта перед катапультированием.
Установившаяся скорость вертикального снижения составляет приблизительно 25-30 м/с и зависит от модели вертолёта и факторов, описанных выше. Такая скорость не может быть погашена только за счет инерции несущего винта и при отсутствии достаточной для набора горизонтальной скорости высоты посадка невозможна. Военные вертолёты работают на малой высоте, поэтому для спасения экипажа иногда устанавливают катапультируемые кресла и предусматривают отстрел лопастей несущего винта перед катапультированием.За время снижения несущий винт накапливает большую кинетическую энергию за счёт своей массы и скорости вращения. За несколько метров до земли пилот с определенным темпом увеличивает шаг несущего винта (устоялся жаргонизм «подрыв винта»). За счет кинетической энергии вращения несущий винт при «подрыве» создает дополнительную подъёмную силу, при этом частота вращения винта уменьшается. Вертикальная скорость снижается до приемлемых величин (примерно 5-6 м/с), и вертолёт производит посадку. Вид посадки зависит от полетной массы вертолета. Пустой вертолет может сесть с вертикальным снижением. При наличии груза на борту приходится садиться с пробегом, «по самолётному».
Вид посадки зависит от полетной массы вертолета. Пустой вертолет может сесть с вертикальным снижением. При наличии груза на борту приходится садиться с пробегом, «по самолётному».
Для более безопасного приземления вертолёт должен иметь или достаточную высоту или достаточную горизонтальную скорость. Высота необходима для раскрутки несущего винта во время снижения. Горизонтальная скорость используется для быстрого перевода кинетической энергии движения вертолёта в энергию вращения винта. При отказе двигателя на малой высоте с большой долей вероятности приземление может закончиться катастрофой.
Зоны лопасти винта при авторотации
Зоны лопасти винта при авторотацииВо время вертикальной авторотации, диск, образуемый вращающимися лопастями, можно разделить на три области: ведущую, ведомую и зону отрывного обтекания. Размер этих областей изменяется в зависимости от наклона лопастей, скорости снижения и частоты вращения винта. Когда эти параметры изменяются, изменяется и процентное отношение этих трёх областей.
Ведомая зона располагается на концах лопастей. Обычно составляет около 30 % радиуса. Ведомая зона обеспечивает торможение лопастей и как следствие, снижение частоты вращения винта.
Ведущая зона, или зона авторотации, обычно составляет от 25 до 70 % радиуса винта и является источником движущей силы вращения лопасти при авторотации. Суммарная аэродинамическая сила в этой области направлена немного вперёд относительно оси вращения и вызывает ускорение вращения винта.
Внутренние 25 % лопасти работают на угле атаки больше критического, вызывая замедление вращения винта.
Постоянная скорость вращения винта достигается тогда, когда сила, образуемая ведущей зоной, уравновешивается силами торможения ведомой зоной и зоной отрывного обтекания. Пилот регулирует наклон лопастей, например, увеличивая площадь ведущей зоны, это вызывает ускорение вращения винта и, в свою очередь, увеличение ведомой и закритической зон, поэтому вращение стабилизируется на более высокой частоте. Уменьшение ведущей зоны уменьшает скорость вращения.
Уменьшение ведущей зоны уменьшает скорость вращения.
Ссылки
Примечания
См. также
Что такое авторотация, и как с её помощью можно посадить вертолёт с отказавшими двигателями? Отвечает авиатехник. | Авиатехник
Здравствуйте, уважаемые читатели моего канала! Сегодня я поделюсь с вами интересной информацией, о которой возможно вы никогда не догадывались.
Речь пойдет о таком понятии, как авторотация.
Под авторотацией подразумевают такой режим вращения воздушного винта или турбины двигателя, при котором вся энергия, необходимая для вращения, отбирается от набегающего на винт (или лопатки) воздушного потока.
Если говорить простыми словами, то здесь мы видим вращение винта за счет воздуха, а не работы двигателя.
Ми-8 в режиме авторотации садится на ВПП (оба двигателя отключены).Ми-8 в режиме авторотации садится на ВПП (оба двигателя отключены).
Впервые данный термин появился в период между 1915 и 1920 гг. Именно на то время выпало создание автожиров и вертолётов.
Несмотря на это, некоторые турбовинтовые самолёты тоже могут использоваться в режиме авторотации.
Например, двигатели самолётов, на которых нет изменяемого шага винта, могут войти в режим авторотации при отказе или же выключении в полёте. Минусы отсутствия флюгирования винта (изменения шага или ещё проще — поворота) заключаются в том, что при неисправности одного винта, у самолёта появится сильный разворачивающий момент и в конце концов он может упасть, ибо управление будет затрудненным.
Именно поэтому на современных турбовинтовых двигателях имеется система флюгирования винта. Осуществляется как в ручную, так и автоматически.
Для чего нужно поворачивать лопатки? Дело в том, что при отказе одного винта во время авторотации, его лопасти будут создавать сильное сопротивления (как я и говорил, это приводит к разворачивающему моменту). В таком случае применяется флюгирование. На фото выше вы можете заметить этот прием на самолёте Europrop TP400. Сопротивление винта сводится к минимуму.
В таком случае применяется флюгирование. На фото выше вы можете заметить этот прием на самолёте Europrop TP400. Сопротивление винта сводится к минимуму.
Иногда с помощью авторотации пилоты могут попытаться запустить двигатель. В тот момент, когда поток раскручивает винт, вместе с этим вращается вал двигателя. После достижения нужной частоты вращения, производится подача топлива с последующим запуском двигателя (срабатывает система зажигания).
Например, на Ми-8 вместо понятия «авторотация» используют — «самовращение несущего винта» (СНВ).
Особенность заключается в том, что при самовращении, винт создает подъемную силу. Главный редуктор при этом раздает крутящий момент на хвостовой винт.
Даже при неисправных двигателях при авторатации продолжает работать генератор переменного тока, который питает весь вертолет.
Давайте подведем итог
Благодаря авторотации большинство ЛА с турбовинтовыми двигателями могут осуществлять безопасную посадку, даже если откажу сразу все силовые агрегаты. Более надежными считаются винты, где возможно использование флюгировния. Авторотация — весьма полезная и нужная вещь на подобной технике. Оказывается, даже у вертолёта есть шансы сесть с отказавшими двигателями!
Более надежными считаются винты, где возможно использование флюгировния. Авторотация — весьма полезная и нужная вещь на подобной технике. Оказывается, даже у вертолёта есть шансы сесть с отказавшими двигателями!
Если вам понравилась статья, поддержите её пальцем вверх! Не забудьте подписаться на канал, чтобы не пропустить новый и интересный материал! Читайте далее: Что такое помпаж двигателя и чем он грозит самолёту? Отвечает авиатехник.
Посадка вертолета — Энциклопедия по машиностроению XXL
Выход центровки за пределы. Если центровка выходит за передний предел, то сложнее производить посадку вертолета (особенно с попутным ветром), при этом действуют ручкой управления плавно, ие допуская больших отклонений от себя. Если центровка выходит за предельно заднюю — взлет невозможен. [c.75]Расчет на посадку вертолета [c.83]
Влияние ветра. Ветер значительно изменяет траекторию планирования встречный увеличивает крутизну траектории, а попутный — уменьшает. Например, при встречном ветре 7—8 м/сек на планировании со скоростью 70—80 км/ч крутизна траектории такая же, как при скорости 50—70 км/ч в безветрие. Чтобы при посадке вертолет планировал по траектории, соответствующей скорости 70—80 км/ч, при встречном ветре скорость увеличивают (но не выше 100 км/ч), а при попутном уменьшают (но не ниже 50 км/ч).
[c.83]
Например, при встречном ветре 7—8 м/сек на планировании со скоростью 70—80 км/ч крутизна траектории такая же, как при скорости 50—70 км/ч в безветрие. Чтобы при посадке вертолет планировал по траектории, соответствующей скорости 70—80 км/ч, при встречном ветре скорость увеличивают (но не выше 100 км/ч), а при попутном уменьшают (но не ниже 50 км/ч).
[c.83]
Взлетно-посадочная полоса (ВПП) — часть летной полосы, имеющая искусственное покрытие, оборудованная и подготовленная для взлета и посадки вертолета. [c.109]
Взлет и посадка вертолета [c.207]
Посадка вертолета производится либо по-вертолетно-му, либо по-самолетному. [c.208]
Посадка вертолета по-самолетному состоит из тех же этапов, что и посадка самолета. [c.208]
Скорость снижения на режиме авторотации определяется нагрузкой на диск, которая, очевидно, должна быть небольшой. Отсюда следует, что малая скорость снижения на режиме авторотации определяется низкой потребной мощностью на режиме висения. Возможность маневра подрыва для безмоторной посадки вертолета более важна, чем установившаяся скорость снижения, поскольку выбор нагрузки на диск определяется в основном требуемыми летно-техническими характеристиками. Возможности подрыва зависят от кинетической энергии несущего винта, возрастающей при увеличении угловой скорости и момента инерции лопасти. Предел по срыву должен быть высоким как с точки зрения характеристик подрыва, так и в отношении минимальной потери оборотов в период от момента отказа двигателя до момента уменьшения общего шага. Таким образом, эксплуатационное значение Ст/о должно быть низким. Момент инерции винта является параметром, наиболее эффективно влияющим на характеристики авторотации вертолета. Ему соответствует безразмерная массовая характеристика лопасти, которая должна быть низкой. Однако для получения большого момента инерции нужны тяжелые лопасти.
[c.309]
Возможность маневра подрыва для безмоторной посадки вертолета более важна, чем установившаяся скорость снижения, поскольку выбор нагрузки на диск определяется в основном требуемыми летно-техническими характеристиками. Возможности подрыва зависят от кинетической энергии несущего винта, возрастающей при увеличении угловой скорости и момента инерции лопасти. Предел по срыву должен быть высоким как с точки зрения характеристик подрыва, так и в отношении минимальной потери оборотов в период от момента отказа двигателя до момента уменьшения общего шага. Таким образом, эксплуатационное значение Ст/о должно быть низким. Момент инерции винта является параметром, наиболее эффективно влияющим на характеристики авторотации вертолета. Ему соответствует безразмерная массовая характеристика лопасти, которая должна быть низкой. Однако для получения большого момента инерции нужны тяжелые лопасти.
[c.309]
Безмоторной посадке вертолета и режиму авторотации н е-сущего винта посвящена следующая литература [Т. 56, W.102,
[c.312]
56, W.102,
[c.312]
В настоящее время для контроля за работой средств ЭХЗ во многих нефтепроводных управлениях широко применяется авиация, которая сочетает контроль с функциями надзора за линейной частью магистрального нефтепровода. Но для контроля устройства ЭХЗ необходима посадка вертолета, что связано с большими затратами летного времени и нерациональным использованием рабочего времени персонала службы ЭХЗ. [c.57]
Помимо перечисленных типов посадки для обеспечения безопасности пассажиров и экипажа следует рассматривать также случаи аварийной посадки вертолета (в т.ч. при отказе всех двигателей). [c.253]
Угол опрокидывания 0 определяют из соображения безопасности посадки вертолета с самовращающимся НВ. Стояночный угол (между строительной горизонталью фюзеляжа вертолета и поверхностью посадочной площадки) необходим для облегчения рулежки вертолета ( = 2—3°) или загрузки через задний грузовой люк (тогда угол отрицательный). [c.256]
[c.256]
На гражданских вертолетах применяется, как правило, шасси с носовым колесом. Данная схема имеет существенные преимущества по сравнению с шасси с хвостовым колесом, среди них безопасная и более простая посадка вертолета в условиях плохой видимости и хорошая путевая устойчивость при разбеге и пробеге. [c.256]
Чрезмерное увеличение степени демпфирования шасси без применения специальных устройств приводит к повышению жесткости амортизации и, следовательно, к росту динамических нагрузок при посадке вертолета. [c.286]
На планировании перед посадкой вертолет обладает кинетической энергией движения всего вертолета и кинетической энергией вращения несущего винта (рис. 1). Величина [c.208]
При комбинированном способе посадки полностью используется кинетическая энергия несущего винта и частично энергия поступательного движения вертолета. При таком способе посадки вертолет выравнивают, сначала резко увеличивая угол тангажа на 30—40°, а затем переводя его в горизонтальное положение и увеличивая общий шаг перед приземлением. За счет большого угла атаки несущего винта в процессе выравнивания тормозятся и вертикальная и гори-
[c.213]
При таком способе посадки вертолет выравнивают, сначала резко увеличивая угол тангажа на 30—40°, а затем переводя его в горизонтальное положение и увеличивая общий шаг перед приземлением. За счет большого угла атаки несущего винта в процессе выравнивания тормозятся и вертикальная и гори-
[c.213]
Расчистка площадки для посадки вертолета и др. целей. Преграждение распространению лесного пожара Воздействие штатными средствами как изотропного, так и направленного дейс 1 вий [c.258]
Муфты свободного хода (МСХ) являются обязательной составной частью трансмиссии вертолета. Конструктивно они входят в редуктор вертолетного ГТД и предназначаются для автоматического отключения двигателей от несущего винта. Такая необходимость возникает в случае отказа двигателей. При этом обеспечивается посадка вертолета на режиме авторотации или продолжение полета с одним работающим двигателем. [c.519]
Посадка вертолета на корабль с помощью приводной радиостанции представлена на рис. 5.2. По пеленгу на приводную радиостанцию летчик выходит на корабль, пройдя его, вертолет разворачивается (влево, вправо) и выходит на курс корабля, по которому следует 1 мин. За- [c.306]
| Рис. 5.2. Посадка вертолета на корабль с помощью приводной радиостанции |
Вертикальный подъем и вертикальное снижение являются основными способами взлета и посадки вертолета. [c.97]
По условиям работы вертолета могут быть реализованы две ситуации общего эксплуатационного нагружения ВС (рис. 13.13). В одном случае вертолет перелетает с грузом и возвращается назад без него, не совершая посадки после освобождения от груза. В другом случае имеет место перелет с грузом в одном и другом направлениях с освобождением от него при посадке вертолета. Обе ситуации имеют свои особенности по повреждению материала за ПЦН, что оказывает влияние на продолжительность распространения уста.лостных трещин. [c.681]
А. на сх. б имеет шток 2, шток 9 в цилиндр 16, расположенные последовательно один в другом. Они образуют камеру 3 низкого Давления, полость с жидкостью 6, камеру 10 в ысокого давления и полость 7 с жидкостью. Между цилиндрами установлены уплотнения 4 и 8.. Взаимодействие, камер 3 и полости 6 такое же, как на сх. а. Взаимодействие между камерой W и полостью 7 происходит через специальный клапан 12. При посадке вертолета сначала сжимается азот в камере низкого давления, затем перетекает жидкость из полости 7 в камеру высокого давления 10, проходя между иглой 15 и центральным отверстием 14 в штоке 9 и отжимая подпружиненный клапан 12. Боковые отверстия в клапане 12 при его отжа-тки располага.ются напротив боковых отверстий штока 9. При снятии на- [c.16]
Запас устойчивости винта на упругом основании может быть повышен как увеличением степени демпфирования колебаний лопасти, так и увеличением демпфирования колебаний фюзеляжа, т.е. повышением демпфирующей способности шасси. Одиако возможности увеличения этих видов демпфирования весьма ограничены, т.к. демпфер лопасти и шасси выполняет ряд других функций, пе связанных с земным резонансом. Демпфер лопасти работает при поступательном полете вертолета и нагружает комлевую часть лопасти гсеременным изгибающим моментом, тем большим, чем больше степень его демпфирования. Причем прочность комлевой части лопасти и втулки определяется главным образом именно наличием демпфера. Чрезмерное увеличение степени демпфирования шасси без применения специальных устройств приводит к повышению динамических нагрузок при посадке вертолета. [c.99]
При отказе одного или большего числа двигателей (для вертолета с числом двигателей больше одного) мощность от работающих двигателей долл на передаваться на винты и другие устройства, обеспечивающие продолжение полета и управление вертолетом. При отказе всех двигателей должно поддерживаться нормальное функционирование винтов на реншме авторотации и работа других устройств, необходимых для управления при сния ении и посадке вертолета. Трансмиссия снабжается устройствами для автоматического отключения от нее любого двигателя в случае его выключения или отказа (например, с использованием МСХ). [c.185]
Если на нижней поверхности носовой части фюзеляжа вертолета по конструктивным или эксплуатационным сообрал ениям нельзя установить переднюю стойку шасси, то применяется схема с хвостовой стойкой. В этом случае перед посадкой вертолета на режиме авторотации необходимо соответственно уменьшать угол тангажа фюзеляжа. [c.256]
Для расширения диапазона предельных углов качки корабля, при которых возможны взлет и. посадка вертолета на качаюш уюся палубу, необходимо вводить в конструкцию передних опор шасси устройство, фиксируюш ее их по продольной оси вертолета при стояночной нагрузке. [c.263]
Размещение крыла относительно фюзеляжа определяется требованиями аэродинамики, объемной комнонопкой фюзеляжа в месте соединения с крылом, КСС главных стоек шасси, эксплуатационными соображениями, требованиями безопасности экипажа при аварийной посадке вертолета. [c.326]
ПОСАДКА ВЕРТОЛЕТА НА РЕЖИМЕ АВТОРОТАЦИИ НЕСУЩЕГО ВИЯТА [c.208]
Посадка вертолета с помощью радионавигационной системы ТАКАН представлена на рис. 5.1. Вертолет следует на радиомаяк системы на высоте — 150 м и выходит в за- [c.305]Общие размеры вертолетной площадки зависят от способов взлета и посадки вертолетов. Для наиболее экономичного и надежного взлета или посадки с использованием воздушной подушки у поверхности площадки, образуемой несущим винтом, рекомендуются размеры рабочих площадок не менее 30×30 м для легких вертолетов, 60×60 м для средних и 80×80 м для тяжелых. [c.435]
Фильм Посадка вертолёта на авторотации. (1990)
Курсанты Кременчугского летного училища во время занятия на аэродроме отвечают на вопросы преподавателя о последовательности действий пилота при отказе двигателя (синхронно).
Летящий вертолет начинает резко снижаться.
Пилот-инструктор и курсант в кабине вертолета.
Стрелки высотомера и оборотов двигателя приближаются к нулю, рука пилота на рычаге шаг-газа.
Стрелки приборов возвращаются к нормальным показателям.
Балансировка вертолета рукоятью управления и педалью.
Снижение вертолета на режиме авторотации и приземление.
Схема сил, воздействующих на вертолет при снижении в режиме авторотации.
Курсанты в классе во время занятия.
Схема взаимодействия скоростей при посадке на авторотации, с максимальной дальностью планирования.
Макет вертолета на столе преподавателя, преподаватель с макетом в руках ведет занятие.
Схема определения дальности планирования вертолета при безветрии.
Приземление вертолета на песчаной косе.
Курсанты отвечают на вопросы преподавателя о точках при посадке вертолета на авторотации на глиссаде, в зависимости от высоты (синхронно).
Вид поля вовремя посадки вертолета (сверху).
Курсанты в классе во время занятия.
Преподаватель демонстрирует курсантам последовательность проведения посадочного маневра вертолета при помощи макета.
Пилот в кабине приземляющегося вертолета.
Формула подрыва общего шага при приземлении.
Вертолет на площадке, у вертолета стоят курсанты с преподавателем.
Формула вычисления высоты начала подрыва.
Вертолет на площадке, макет вертолета с вращающимся винтом.
Приземление вертолета с использованием подсечки.
Командир экипажа вертолета, вынужденно приземлившегося в Мытищах, говорит об использовании подсечки при посадке (синхронно и за кадром).
Вид из кабины приземляющегося вертолета.
Панорама зеленых насаждений (сверху).
Приземляющийся вертолет.
Преподаватели училища говорят о недостаточном количестве учебных часов для овладения курсантами навыков посадки вертолета в режиме авторотации, особенностях посадки в данном режиме, об оптимальном количестве учебных часов (синхронно).
Приземление вертолета на авторотации.
Пилот вертолета говорит о необходимости тренировки для посадки на авторотации будущих командиров экипажей для снятия психологического напряжения и закрепления навыков(синхронно и за кадром).
Вид из кабины вертолета во время посадки на авторотации.
Вид части аэродрома (сверху), дельтапланы и вертолеты на аэродроме.
Взлет мотодельтаплана и легкого самолета.
Взлет вертолета с песчаной косы.
Волны от воздушных потоков винта, борт вертолета.
Вертолет в полете.
Российский изобретатель предложил систему обеспечения «мягкой посадки» ракет
Компания SpaceX, как известно, отказалась от идеи посадки ракет Starship на бетонную посадочную площадку. Практика таких попыток показала что ракета неизбежно получала механические повреждения при посадке. Поэтому было принято решение смягчить посадку с помощью «руки захвата» Mechazilla.
Альтернативный вариант «руки» недавно предложил изобретатель Дахир Семенов.
Проблему посадки энтузиаст предлагает решать за счет применения различных волокон, кевларовых, карбоновых, флексабитовых, СВМПЭ, ONNEX. Лучшим вариантом автор считает применение сверхпрочных и высокомодульных волокон (нити) из высокомолекулярного полиэтилена.
Конечно канаты из полиэтилена должны быть защищены специальной жаропрочной оболочкой, чтобы не сгореть от факела двигателей.
Оболочка изоляции сделанная из керамической ваты послужит дополнительным буфером при контакте с корпусом ракеты. По словам автора он сомневается в том что механическая рука Маска сможет более деликатно обхватить ракету без повреждений.
Механическая рука MECHAZILLA по идее SpaceX должна совершить обхват ракеты при большей точности посадки, чем предлагаемая технология Дахира Семенова.
При работе руки допускаемые отклонения не превышают 1 метра! Привод руки работает от одного двигателя, и ошибка в несколько метров может быть фатальной.
А еще есть проблема с большой инерционностью всей конструкции, корабль не сможет встать сам на опоры и медленно на них снизить скорость до нуля, скорее всего функционально это не ловушка, а активная площадка на высоте. Они его не ловят, а предоставляют кораблю единственный шанс, чтоб он сам на неё смог приземлиться.
Все эти недостатки дали повод задуматься автору над более простым решением…
Альтернативный вариант это площадь 500х500 метров, допускающая отклонения ракеты до 10 градусов! Ловушка активно ловит ракету, не полагаясь на маневрирование самой ракеты. По словам автора стоить система будет не дороже одной ракеты, а служить десятки лет.
Система по сути это огромная станция с кинематикой параллельного робота, что и было запатентовано. Это дает выигрыш в надежности, грузоподъемности и позволяет использовать систему при различных погодных условиях.
Как уточнил инженер Дахир Семенов, — «Во первых, наши канаты умеют активно уходить от факела двигателей во время прохождения корабля через окно ловушки, а во вторых, есть жаропрочные керамические ткани которые хорошо держат высокие температуру и их так просто не сжечь. За эту тему я спокоен. В грузоподъемности канатов мы не ограничены совсем, сейчас есть волокна прочнее стали в 15 раз, создать специальные канаты на 1000 тонн с жаропрочной оболочкой ничего не стоит».
Одним из побочных преимуществ применения системы по словам автора станет отсутствие необходимости в выдвижных опорах на ракете, что снизит общий вес ракет.
Торможение попавшей в «ловушку» ракеты будет осуществляться гидравлическим способом. Демпферы специальной конструкции обеспечат самое минимальное обратное ускорение, которое только возможно математически при заданной скорости и тормозном пути.
Новая система мягкой посадки будет иметь сменные элементы, и десяток разных инструментов для разных задач посадки. Поэтому за день можно будет принять ракеты разных конструкций и веса.
Потенциально возможен и запуск с тех же станций «мягкой посадки».
P.S. — Правда напоминает идею батута?
Режим авторотации — СВВАУЛ
[b]Кузнецов Фридрих Николаевич[/b], выпускник Сызранского ВАУЛ 1957г, ( МИГ-15), оставленный в училище инструктором на МИГ -15. В 1958г перевёлся инструктором на МИ-4 в Пугачёвское Вертолётное ВАУЛ. (ком. полка полк. Аугуль, ком аэ. Анисимов.)
Общий налёт 8500ч, из них на самолётах 250ч., а остальное Ми-4 и Ми-8 ( Адлер, Москва, Архангельс, Петрозаводск, Надым, заполярье, морское побережье, горы Кавказа, средняя полоса и даже Бразилия, Рио да Женейро.
Посадка вертолёта одновинтовой схемы без двигателя( двигателей) на режиме авторотации до сих пор не имеет единой методики выполнения, не говоря уже о тренировках экипажей в процессе обучения и поддержки навыков у пилотов лётных подразделений. Предлагаю упражнение для отработки расчёта на посадку, в режимах авторотации несущего винта, без приземления и поэтому безопасное, но позволяющее пилоту создать в своём подсознании последовательность технических действий, в результате которых вертолёт будет приземлён с минимальным ущербом, на ограниченную площадку, на которой невозможно сесть рекомендуемым инструкцией способом, то есть на скорости 100 — 120 км/ ч. Я в 1964 году разработал практически методику расчёта на вертикальной авторотации, до тех пор ещё никем не выполненной и не опубликованной.
Выполняя облёт МИ-4 после смены двигателяна высоте 1500 м., я перевёл вертолёт в режим авторотации на скорости 100 км/ч , затем стал гасить скорость, создавая кaбрирование., контролируя обороты НВ и изменение вертикальной скорости по вариометру. Оброты НВ несколько увеличились, а стрелка вариометра пошла вверх, перевалила на подъём 1-2 м/с, а затем после падения скорости ниже 60 км/ч, стала показывать снижение, медленно, но верно увеличивая скорость снижения. На приборе горизонтальной скорости установился 0, а вариометр показывал 4-5 м/с и постепенно увеличивая показания: 7 , 8 , 9 , 10 ,. При этом обороты НВ не падали, а вертолёт хорошо управляемый перемещался вертикально. На высоте 300 м. я отклонил ручку циклического шага вперёд и разогнал скорость 100 км/ч , свёл стрелки оборотов двигателя и редуктора, создал режим двигателя для горизонтального полёта и затем перевёл в набор высоты и снова повторил вертикальнцю авторотацию.
На базе фактических данных, полученных при гашении скорости на режиме авторотации, у меня сформировалась новая формула расчёта, для посадки на ограниченную площадку. Выбрав площадку, выполняется обычный режим авторотации по троектории в центр площадки и, при достижении высоты 40-50м., производится гашение горизонтальной скорости, при этом гасится и вертикальная. За тем необходимо убрать тангаж и использовать перед приземлением инерцию НВ, взяв шаг, как говорят » под мышку».
Работая в Архангельске зам. ком. АЭ, с разрешения командира лётного отряда ( Фамилия «ПЛОХИХ»), я несколько раз выполнил такие расчёты с приземлением на полосу и в сугроб снега, на аэродроме Кегосторова. В дальнейшем обучал лётный состав на тренировках в зоне, выполнению вертикальной авторотации.
Для более качественного обучения, я считаю необходимо создать офицально упражнение ввода и вывода вертолёта в вертикальную авторотацию.
Авторотация | SKYbrary Aviation Safety
Определение
Авторотация — это состояние полета вертолета, во время которого несущий винт вертолета приводится в движение только аэродинамическими силами без мощности двигателя. Это маневр, при котором двигатель отсоединяется от системы несущего винта, а лопасти ротора приводятся в движение исключительно восходящим потоком воздуха через ротор. Другими словами, двигатель больше не подает мощность на главный ротор. Вектор тяги несущего винта вертолета используется для создания тяги вперед в полете с двигателем; таким образом, если у вертолета нет другого источника тяги, он должен снижаться в режиме авторотации.
Авторотация вслед за двигателем или отказом хвостового винта
Наиболее частой причиной авторотации является отказ двигателя (или отказ обоих двигателей в случае двухмоторного вертолета), но авторотация также может выполняться в случае полного отказа. отказ рулевого винта, поскольку при авторотации крутящий момент практически отсутствует. (Хотя в этом случае двигатель [ы] должен быть остановлен на заключительных этапах захода на посадку, чтобы предотвратить реакцию двигателя на крутящий момент во время посадки.)
Если двигатель выходит из строя, блок свободного хода автоматически отсоединяет двигатель от главного ротора, позволяя ротору вращаться свободно. По сути, блок обгонной муфты отключается каждый раз, когда частота вращения двигателя (ERPM) меньше, чем частота вращения ротора (RRPM).
Изготовитель указывает минимальную и максимальную скорость вращения в минуту для каждого типа вертолета. Нормальный диапазон RRPM отмечен на манометре в виде зеленой дуги, а допустимые предупредительные диапазоны отмечены желтым или желтым цветом и заключены в красную метку, указывающую минимально и максимально разрешенные.
В момент отказа двигателя лопасти несущего винта создают подъемную силу и тягу за счет комбинации их угла атаки и скорости. Когда мощность двигателя падает, составляющая сопротивления быстро снижает скорость ротора. В Руководстве по летной эксплуатации будет оговариваться минимальный RRPM, ниже которого, если скорость вращения ротора снизится, может быть невозможно восстановить RRPM до полетного значения: ротор полностью остановится и перестанет вращаться. Следовательно, пилот должен, если мощность двигателя не работает, немедленно уменьшить общий шаг (и, таким образом, уменьшить как создаваемое подъемной силой, так и сопротивление профиля лопасти), в результате чего вертолет немедленно начинает снижение, создавая восходящий поток воздуха через роторная система.Этот восходящий поток воздуха через ротор изменяет векторы подъемной силы и сопротивления по размаху лопастей, чтобы создать внутреннюю секцию, где сопротивление действует в плоскости вращения лопастей, и, таким образом, удерживает их во вращении. Это обеспечивает достаточную тягу для поддержания числа оборотов ротора во время спуска, а также создает некоторую подъемную силу. Тем не менее, скорость снижения при авторотации обычно составляет 1500–2000 футов в минуту на многих вертолетах, а на некоторых может быть выше. Поскольку при авторотации рулевой винт приводится в движение трансмиссией несущего винта, баланс сохраняется, как и в нормальном полете.
Во время авторотации восходящий поток воздуха через роторы поддерживает частоту вращения
Несколько факторов влияют на скорость снижения при авторотации: высота по плотности, полная масса, воздушная скорость и частота вращения ротора (RRPM):
- На большой высоте над уровнем моря скорость спуска будет выше, потому что воздух менее плотный.
- Большой общий вес увеличивает как скорость снижения, так и скорость спуска в минуту.
- При IAS ниже рекомендованной минимальной скорости снижения IAS, RRPM будет ближе к нижнему пределу разрешенного диапазона, а при более высоком IAS RRPM может быть ближе к верхнему пределу разрешенного диапазона.
Основным контролем скорости снижения является воздушная скорость. Повышение или понижение воздушной скорости достигается с помощью циклического управления рычагом наклона по тангажу, как и в нормальном полете.
Теоретически у пилота есть выбор воздушной скорости для изменения угла снижения, от вертикального снижения до максимальной дальности, которая является минимальным углом снижения. Скорость снижения высока при нулевой воздушной скорости и снижается до минимума примерно от 50 до 70 узлов для большинства легких и средних вертолетов, в зависимости от конкретного типа вертолета и только что упомянутых факторов.
По мере увеличения воздушной скорости сверх минимальной скорости снижения скорость снижения снова увеличивается. Такие условия могут привести к увеличению дальности авторотации, и, поскольку RRPM увеличивается с увеличением воздушной скорости, RRPM может контролироваться на пониженном значении (в пределах ограничений Руководства по летной эксплуатации) с использованием дополнительного общего шага: это обычно увеличивает дальность до максимума.
Аналогичным образом, в свою очередь, из-за увеличения нагрузки на лопасти RRPM будет иметь тенденцию к увеличению, и пилоту может потребоваться небольшое увеличение общего шага, чтобы удерживать RRPM в пределах, указанных производителем.
При посадке с авторотации энергия, запасенная во вращающихся лопастях, используется для уменьшения скорости снижения и выполнения мягкой посадки. Для остановки вертолета с высокой скоростью снижения требуется большее количество энергии, чем требуется для остановки вертолета, который снижается медленнее. Следовательно, авторотационное снижение на очень низкой или очень высокой воздушной скорости более критично, чем выполняемое при минимальной скорости снижения.
Кроме того, при авторотации будет скорость, выше которой задние части лопастей ротора простираются вдоль размаха лопастей до такой степени, что теперь ротор начинает заметно замедляться.Эта воздушная скорость обычно выражается как ограничение воздушной скорости в Руководстве по летной эксплуатации для авторотации. Поскольку RRPM имеет самое низкое значение при нулевой воздушной скорости или авторотации с низкой воздушной скоростью, и отсутствует эффективная воздушная скорость для факельного маневра перед приземлением (обсуждается ниже), в системе ротора может быть недостаточная инерция для снижения скорости снижения перед приземлением. приземление. Это особенно характерно для вертолетов с малоинерционными роторными системами, таких как, как правило, модели R22, Rotorway, модели Enstrom и некоторые другие.Во-вторых, авторотация по диапазону скоростей приводит вертолет в конфигурацию, которую необходимо будет своевременно изменить, чтобы пилот мог выполнить посадку на авторотации (или с выключенным двигателем). Вертолет необходимо будет замедлить до подходящей путевой скорости для приземления и пробега по земле по зоне приземления, будь то на салазках или на колесной ходовой части.
Практическое применение обучения авторотации аналогично «Практике принудительной посадки без мощности», выполняемой пилотами самолетов.Как и в случае с самолетом, пилот вертолета может просто повторно подать мощность, чтобы начать уход на второй круг на любой высоте, и (за исключением случаев, когда пилот должен управлять дроссельной заслонкой в координации с приложением общего шага). ) в большинстве случаев это просто вопрос подъема рычага управления и настройки подъемной силы с соответствующей регулировкой угла наклона.
Во время авторотации вертолет остается полностью маневренным, и комбинация поворотов и / или изменения воздушной скорости может использоваться для корректировки траектории полета и маневрирования самолета в подходящую зону посадки.
Авторотации для приземления или посадки с выключенным двигателем (EOL) обычно практикуются почти на всех однодвигательных вертолетах и являются обязательным маневром для проверки навыков. При проведении обучения EOL инструктор или экзаменатор будет задерживать дроссельную заслонку или блокировать систему управления двигателем, чтобы двигатель оставался на холостом ходу при поднятом общем рычаге. Таким образом, эти маневры правильно называются имитацией посадки при выключенном двигателе (SEOL), поскольку двигатель фактически не выключается.
Техника автоматической посадки
В тех случаях, когда повороты выполняются для достижения выбранной зоны посадки, цель всегда должна заключаться в том, чтобы вертолет выровнялся с зоной посадки не позднее, чем на 300 футов над землей при устойчивом авторотации на рекомендуемая IAS (которая обычно будет на несколько узлов выше, чем минимальная скорость снижения IAS, чтобы максимизировать выгоды от факела, обсуждаемые ниже). На подходящей высоте (обычно от 40 до 100 футов в зависимости от типа вертолета) воздушная скорость снижается до комфортной скорости для посадки с разбегом с использованием замедляющего положения с поднятой носовой частью.Ракета имеет преимущество как в снижении скорости движения, так и в увеличении RRPM во время вспышки, что увеличивает запас энергии в роторе: необходимый для смягчения приземления. Дополнительная подъемная сила, создаваемая во время факела, снижает скорость снижения. Скорость при приземлении и результирующий пробег по земле зависят от скорости и количества осветительных ракет. Чем больше степень осветления и чем дольше он удерживается, тем меньше скорость приземления и тем короче пробег по земле. Чем ниже желаемая скорость при приземлении, тем точнее должны быть синхронизация и скорость факела, особенно в вертолетах с малоинерционными роторными системами.
Поскольку факел обычно увеличивает RRPM, пилот может (за исключением вертолетов с малоинерционными роторными системами) немного поднять общий рычаг в конце факела. (Небольшое увеличение общего шага часто называют «проверкой».) Это будет иметь эффект использования некоторой дополнительной RRPM, чтобы дать некоторую дополнительную тягу несущего винта, которая уменьшит скорость снижения и обеспечит большее замедление, поскольку тяга ротора действует противоположно направлению поступательного движения.
Расширенное положение не может сохраняться до приземления, иначе хвост вертолета сначала ударится о землю. Таким образом, после завершения факела пилот должен повторно выбрать положение по горизонтальному тангажу с помощью циклической ручки перед приземлением.
На последних этапах EOL вертолет находится в горизонтальном положении, с относительно низкой скоростью полета вперед и с остаточной инерцией в несущем винте, чтобы помочь пилоту совершить плавное приземление. Пилоту придется поднять общий рычаг, чтобы использовать часть или всю оставшуюся подъемную энергию в роторной системе для смягчения приземления.
Очень важно, чтобы педали и педали были скоординированы во время разворота и приземления, чтобы вертолет приземлился на прямом движении. После приземления нельзя перемещать рычаг управления циклическим приводом и общий рычаг до тех пор, пока не завершится разбег и вертолет не остановится. Тем не менее, при необходимости следует использовать педали рыскания, чтобы наземный крен оставался прямым.
Упражнение в воздухе: авторотация с прямым входом в EOL
Техника авторотации
Авторотация с прямым входом в SEOL часто используется для отработки заключительных этапов авторотации при приземлении.Учитывая, что при практической вынужденной посадке цель всегда должна быть на уровне крыльев и при рекомендованных IAS для EOL на высоте 300 футов над землей, с этого момента процедура и, в частности, управление энергией RRPM, в целом одинаковы.
См. Рисунок выше (позиция 1). Из горизонтального полета с рекомендованной изготовителем воздушной скорости, на высоте более 500 футов над уровнем моря и по направлению против ветра плавно, но уверенно опустите рычаг общего шага в крайнее нижнее положение, поддерживая RRPM на зеленой дуге.
Координируйте коллективное движение с помощью педалей рыскания, чтобы поддерживать баланс, и используйте циклический джойстик для регулировки положения по тангажу, чтобы выбрать и поддерживать желаемую скорость полета. В вертолетах с поршневым двигателем после полного опускания коллектива уменьшите дроссельную заслонку, чтобы обеспечить чистое разделение игл. После разделения игл отрегулируйте дроссельную заслонку так, чтобы скорость ERPM оставалась выше нормальной скорости холостого хода, но не настолько высокой, чтобы иглы снова соединились. Производитель часто рекомендует установить ERPM.В Руководстве по летной эксплуатации могут быть указаны различные методы управления двигателем для вертолетов с газотурбинным двигателем и других двигателей с системами управления двигателем.
В позиции 2 самолет должен находиться в авторотации с рекомендованным авторотационным режимом IAS, с постоянным IAS, RRPM в зеленом секторе и с балансировкой вертолета.
Примерно на высоте от 40 до 100 футов над поверхностью или на высоте, рекомендованной производителем (положение 3), запускается факел, выбирая замедленное положение с достаточной задней циклической рукояткой для уменьшения скорости полета вперед и уменьшения скорости снижения.Необходимо соблюдать осторожность при выполнении сигнальной ракеты, чтобы циклическая ручка не двигалась назад так резко, чтобы вертолет не набирал высоту, а также не двигалась слишком медленно, так как в этом случае будет небольшой эффект вспышки, который поможет остановить снижение. . Сигнальная ракета может быть маневром «только один раз» для определенного положения по тангажу с поднятым носом или применяться постепенно, но таким образом, чтобы избежать любого положения с экстремальным тангажом. RRPM должен увеличиваться во время вспышки, и заметное увеличение RRPM позволяет пилоту сделать небольшое движение вверх (или «Check») коллективного рычага, чтобы максимизировать как подъемную силу, так и замедление, когда вертолет находится в расширенном положении.
По мере того, как дорожный просвет между хвостовой частью вертолета и землей уменьшается, а скорость движения снижается до очевидного быстрого темпа бегуна (положение 4), циклический подъемник перемещается вперед, чтобы установить вертолет в горизонтальном положении фюзеляжа для посадки. Высота в это время должна быть приблизительно от 8 до 15 футов над уровнем моря, в зависимости от высоты, рекомендованной производителем. Следует проявлять крайнюю осторожность, чтобы избежать чрезмерно высокого положения носа и опускания хвоста ниже 10 футов.
На этом этапе остается только остающаяся инерция в роторной системе для обеспечения подъемной силы, и вертолет будет снижаться с небольшой поступательной скоростью (положение 5).Пилот должен увеличить общий шаг, если необходимо, чтобы проверить снижение и смягчить посадку. Педали рыскания используются для поддержания курса при увеличении общего шага из-за уменьшения RRPM и, как следствие, уменьшения влияния рулевого винта.
После приземления и полной остановки вертолета рычаг управления опускается в крайнее нижнее положение. Не следует предпринимать попыток остановить движение по земле с задним циклическим движением, так как лопасти несущего винта могут удариться о хвостовую балку при малых оборотах в минуту.Скорее, за счет небольшого опускания коллектива во время пробега по земле, на ходовую часть ложится больший вес, что замедляет вертолет.
Подведем итоги метода EOL из установившегося авторотации при рекомендованном IAS: FLARE (или F-L-A R-E), CHECK (кроме низкоинерционных роторных систем) LEVEL и CUSHION.
Распространенные ошибки при авторотации
- Отсутствие достаточного количества педали против торможения при уменьшении мощности.
- Резкое опускание носа при потере мощности.Разгрузка роторной системы вызывает дальнейшую потерю RRPM, а режим разгона может привести к чрезмерному увеличению IAS и увеличению скорости снижения.
- Неспособность поддерживать RRPM в пределах Руководства по летной эксплуатации во время снижения.
- Несоблюдение рекомендованного IAS, при котором факел эффективен.
- Развальцовка на неправильной высоте.
- Слишком агрессивное или недостаточно агрессивное развальцовывание.
- Прекращение слишком высокого раструба и / или… ..
- ….применение подъемного рычага на слишком большой высоте, что приводит к жесткой посадке, потере контроля над курсом и возможному повреждению рулевого винта и упоров лопастей несущего винта.
- Невозможно выровнять вертолет до приземления.
Несчастные случаи и происшествия
- AS32, в пути, Северное море, Норвегия, 1998 г .: 20 октября 1998 г. в Северном море у Eurocopter AS332L Super Puma, эксплуатируемого Norsk HeliKopter AS, произошел отказ двигателя с авторотацией и последующая потеря высоты.Экипаж неверно определил неисправный двигатель и снизил мощность оставшегося исправного двигателя. Однако ошибка была обнаружена как раз вовремя, чтобы экипаж восстановил управление вертолетом.
Статьи по теме
Дополнительная литература
Helicopter Aviation
Helicopter Aviation [Верхний] [Вверх] [Предыдущая] [Следующий] Авторотации используются для выполнения посадки с выключенным двигателем с высоты в в случае отказа двигателя. JPEG или Последовательность GIF из имеются фотографии с авторотацией.Описание маневра
Авторотация используется при отказе двигателя или при отказе рулевого винта. требует от пилота эффективного выключения двигателя. Это очень похоже к планированию в самолете.Запись
Для входа в авторотацию пилот опускает коллектив до упора, одновременно добавляя правую педаль. Понижение коллектива поддерживает обороты при входе в режим авторотации, и сохраняет угол атаки (угол атаки) на нормальное значение во время скольжения.Добавлять правую педаль необходимо, потому что при авторотации нет крутящий момент.Во время полёта с включенным питанием пилот много использовал левую педаль для противодействия крутящему моменту, создаваемому двигателем. Однажды вертолет происходит авторотация, двигатель отключается и больше не выдает крутящий момент.
Пока опускают коллектив, нос вертолета имеет склонность к падению. Пилоту необходимо использовать циклический режим на корме, чтобы не допустить это. Если позволить носу опускаться вниз, возникают две проблемы: уменьшить число оборотов в минуту, потому что это уменьшает количество воздуха, проходящего через ротор диск, и он имеет тенденцию увеличивать воздушную скорость, обычно намного выше диапазона, на который вы хочу использовать при автоповороте.
Установление скольжения
Когда воздух начинает подниматься через роторную систему, запускается частота вращения. увеличиваться, и в зависимости от того, как установлен вертолет, число оборотов в минуту может становиться слишком высоко. В этом случае, когда обороты становятся высокими, пилот может увеличивать общий шаг для более низких оборотов.Пилот должен установить нормальное авторотационное положение, чтобы нормальная воздушная скорость. Хотя вертолеты будут самовращаться на нулевой скорости и даже при отрицательной воздушной скорости обычно пилот хочет удерживать Скорость полета на глиссаде 60-70 узлов.
Выбор площадки для посадки
Надеюсь, в первые секунды пилот установит авторотацию. и выберет площадку для приземления. Подход к посадке должен почти всегда по ветру, поэтому пилот должен выбрать место что позволит ему маневрировать против ветра.Пятно обычно должно быть ровным, твердым и достаточно ровным. Такое место не всегда достижим, но, очевидно, предпочтительнее.
Одна вещь, которую я быстро ищу, — это столбы, к которым могут быть натянуты провода.Если я есть любое другое место для приземления , я буду держаться подальше от того, которое может есть провода. Последнее, что мне нужно сделать на коротком финале, — это попытаться притирать провода!
После того, как пилот выбрал площадку для приземления, я рекомендую ему визуализировать стандартная схема движения, наложенная на посадочную площадку и согласованная с ветер. Пилот должен выяснить, на какой ноге он сейчас находится, и затем пролетите по схеме так, чтобы он прибыл на конечный этап захода на посадку в высота и скорость полета, которые позволят ему приземлиться в выбранном районе.
Летая по прямоугольной схеме движения, пилот может оказаться на опорной ногой, следя за углом к площадке приземления. Когда угол правильный, он просто завершает поворот и будет очень близко к желаемой точке. Если пилот начинает видеть угол до того, как достигнет расширенной «средней линии», он может просто закончить досрочно. Срезая угол, он уменьшает расстояние, на которое он должен лететь, и добирается до места, не заканчивая низкий.
Если пилот окажется немного высоко над базой, он может просто летать. через расширенную осевую линию и немного позже повернуть на финал.Дополнительное расстояние требует дополнительной высоты, и он все еще делает это. на свое место.
Небольшой перерегулирование предпочтительнее небольшого недорега, потому что это может легко исправить, оставив при этом достаточно энергии. Недолет обычно требует максимальной скорости скольжения и перетаскивания ротора Снижение оборотов до минимально допустимого значения. Если пилот неосторожен, результатом может быть достижение точки с низкими оборотами. Это наверное не проблема с системой ротора с малой инерцией, но с высокой инерцией В системе ротора обороты могут не восстановиться до приземления.
Вспышка
Пилот запускает факел, используя заднюю циклическую вспышку. Нет коллектива или педали ввод обычно требуется. Высота, на которую пилот должен начать вспышка зависит от многих факторов, в том числе от модели вертолета, скорость снижения, воздушная скорость, скорость снижения, встречная составляющая, и как быстро пилот будет двигать циклический двигатель.У факела двоякая цель. Во-первых, это замедляет скорость спуска. вертолета, от 1000 или 2000 футов в минуту до гораздо меньшего, так что можно сделать мягкое касание.Это также уменьшает переднюю землю скорость до нескольких узлов (надеемся!), чтобы скольжение на шасси сводится к минимуму.
Ракета должна быть рассчитана таким образом, чтобы скорость снижения не обнулялась, потому что вертолет будет оставлено висеть в воздухе обдува RPM, но, скорее, ракета должна быть рассчитанным на снижение скорости снижения, чтобы вертолет приближался к землю по управляемой ставке. Скорость спуска должна уменьшаться так, чтобы он либо стремится к нулю прямо над землей, либо находится достаточно низко, чтобы немного коллективный шаг может свести его к нулю.
Посадка
Приземление достигается (обычно) путем установки вертолета на уровень. отношение, а затем использовать коллектив, чтобы смягчить приземление, как в парящий авторотация. Педали используются для совмещения шасси с наземный путь.Восстановление энергии
Если пилот практикует авторотацию, он может решить вернуться к парить, а не приземляться. Процедура начала сбора коллективных в то время как все еще находится в сигнале, как только его эффективность начинает снижаться, прежде, чем произойдет какое-либо увеличение скорости погружения.Запустив рекавери рано, движок не пытается отыграть догонялки, и восстановление можно всегда выполняется с частотой вращения в зеленом диапазоне.Общие ошибки
Гоша их много! Вот несколько:Неспособность полностью опустить коллектор
Если пилот забывает спустить коллектив и это настоящий отказ двигателя, это роковая ошибка. Понижение коллектива — важнейшая часть делаю авторотацию. Если вы не забудете это сделать, вы, вероятно, будете гулять подальше от приземления.Некоторые пилоты выставляют только часть коллективного шага. путь вниз. Они узнают, где ему место. Единственная проблема с это то, что позиция, на которую должен пойти коллектив, зависит от многих такие факторы, как оснастка продольных звеньев, полная масса и высота над уровнем моря. Эти вещи могут меняться день ото дня. Этот метод также задерживает восстановление оборотов ротора, а для этого нет веских причин.Лучший метод — полностью снизить коллектив, и когда частота вращения начнет снижаться. создать резервную копию какой-то коллектив должен быть поднят, чтобы остановить RPM где-нибудь в рабочем диапазоне.
Отказ дифферента с педалями против крутящего момента
Пилоты либо забудут нажать правую педаль, либо будут нажимать слишком много, или даже иногда нажимаю левую педаль! В любом случае самолет должен быть автоповорот в триммер, и пилот может сделать это, вставив правильный количество правой педали при отказе двигателя.Позволяет носу опускаться
Мы уже обсуждали это, но я повторяю это, потому что это один из самые частые ошибки, которые я вижу во время ввода. Не , а пусть нос падение во время входа.В каком бы положении ни находился вертолет, войдите авторотация в таком положении, а затем после авторотации установлен, пилот может вносить любые коррективы, необходимые для правильная воздушная скорость. Если позволить носу опустить вниз, восстановление RPM (это похоже на противовоспалительное средство), плюс пилоты нередко превысить скорость ротора, дождавшись, пока скорость полета не достигнет 80 узлов или больше, а затем внезапно пытается исправить это, дернув обратно на циклический. В Результат — почти мгновенное превышение скорости ротора.Неспособность контролировать частоту вращения ротора с коллективом
Большинство вертолетов оснащено так, что при нормальном весе у коллектива будет необходимо немного поднять, чтобы поддерживать частоту вращения ротора в нормальном рабочем диапазоне. Общий ошибки заключаются в том, чтобы либо оставить коллектив полностью опустошенным до тех пор, пока ротор происходит превышение скорости или чрезмерный контроль над коллективом, перемещая его вверх и вниз в течение всего скольжения. Правильный способ манипулировать коллективом — снизить он полностью опускается при входе в авторотацию. Затем, когда число оборотов начинает увеличиваться по направлению к нормальной рабочей области поднимите достаточно коллектива, чтобы остановить обороты от изменения.Подождите несколько секунд, пока он не стабилизируется, и сделайте последний регулировка, чтобы установить частоту вращения именно там, где это необходимо. Обычно больше нет во время скольжения потребуется манипулирование коллективом. Один Исключением является то, что во время поворотов, особенно на большой скорости, некоторые коллективные может потребоваться для предотвращения слишком высоких оборотов. Выкатывается из поворот, пилот должен вернуть коллектив на прежнее место. была введена очередь. Выполняя повороты на более низких скоростях, мало или совсем не потребуется коллектив.Неспособность маневрировать к точке предполагаемой посадки
Многие пилоты приобретают навыки авторотации на взлетно-посадочную полосу на своем домашний аэропорт, но у них больше проблем при попытке совершить конкретную посадку область вне аэропорта. Я выступаю за создание (плотного) трафика по схеме в зону приземления, как это делается в аэропорту. Пилот надо разобраться с ветром, а значит, где будет «финал». Тогда пилот должен выяснить, где он сейчас находится по отношению к движению шаблон (он уже на подветренной, базовой или финальной?).Как только он знает, что нога, на которой он находится, он может манипулировать длиной оставшихся ног, чтобы прибыть на финале на нужной высоте. Еще предлагаю очень короткий финал. В чем длиннее финал, тем больше вероятность перерегулирования или недооценки, с нет простого способа исправить после того, как обнаружено недостижение или перерегулирование. Вместо, летайте на очень плотной базе и рассчитывайте свой поворот на короткий финал, чтобы дать вам желаемое расстояние до точки приземления. Если вы немного низки, поверните финал немного рано. Если вы немного накачены, отложите поворот до финала, перескочите немного от средней линии, и использовать дополнительную высоту на базе.Для Могут потребоваться грубые ошибки, S-образные развороты или нулевая (или отрицательная) воздушная скорость. Один Последнее правило, которое у меня есть: никогда не поворачивайся на 360 градусов. Вы теряете из виду ваш угол въезда слишком длинный. Вместо этого, если у вас огромное количество Чтобы сбросить высоту, выполните в финале фигуру восьмерки. Таким образом, пятно всегда виден, и вы можете вернуться в финал, когда угол начнет уменьшаться. смотреть прямо.Факел на неправильной высоте
У каждого вертолета есть диапазон высот, на которых он должен запускаться.В высота будет меняться от полета к полету в зависимости от полной массы, плотности высота, ветер и скорость полета. Как правило, самолеты с более высоким диском нагрузки требуют более высокого факела. Если пилот вспыхивает слишком высоко, вертолет остановится, он снизится слишком высоко над землей для безопасного посадка. Если пилот светит слишком низко, он будет вынужден выровнять вертолет (избавиться от засветки) слишком рано (чтобы не задеть хвостом о земля). Результатом будет высокая скорость спуска (которую он может возможно исправить поднятием коллектива) и высокой путевой скоростью (которая он не может исправить, поэтому он проскользнет на сотни футов).Предполагая, что мы не всегда можем сделать идеальную вспышку, что мы предпочли бы ошибиться зависит от поверхности, на которую мы собираемся приземлиться. Если поверхность твердая и уровень, какой-нибудь слайд, вероятно, не повредит, а мы бы предпочли быть немного ниже так что мы получаем приятное мягкое касание, за которым следует небольшое скольжение. Если поверхность не позволяет нам скользить (болото или что-то подобное, что вызывает скольжение чтобы закопаться) факел, вероятно, должен быть немного выше, чтобы гарантировать, что мы сможем получить избавиться от всей поступательной скорости. Мы можем приземлиться немного тяжелее, но, будучи более вертикальное мы уменьшаем вероятность опрокидывания.Одно предостережение в том, что человек существа совершенно не переносят вертикальное ускорение, поэтому, если люди во избежание травм спины, раструб лучше не быть слишком высоким .
Слишком агрессивное или недостаточно агрессивное развальцовывание
Скорость, с которой нужно поднимать нос самолета, составляет связанные с полной массой, высотой плотности, ветром и воздушной скоростью. В целом если общий вес велик, потребуется более агрессивный факел. Если высота плотности высокая, требуется более агрессивный факел.Если ветер высокий, требуется минус агрессивный факел. А если скорость полета высокий, требуется менее агрессивный факел. Пилоты могут приспособиться к незначительным отклонения воздушной скорости от факелов на разных высотах или с разными количество агрессивности. Например, если скорость полета на 10 узлов ниже оптимально, компенсировать это поможет более агрессивная засветка. Конечно существуют пределы возможной коррекции.Отказ от горизонтали самолет
Некоторые самолеты приземляются в слегка опущенном хвосте, но многие другие Перед приземлением крайне важно выровнять шасси.Отказ это может привести к ударам хвостовой балкой и попаданию морских свиней (где вы пятки, а затем перекатиться на носки и перевернуться вперед).Невозможность удержания курса во время скольжения
Есть несколько причин, по которым заголовок может не сохраняться во время любой наземный оползень. Во-первых, пилот не может управлять педали правильно, во-вторых, если обороты ротора становятся слишком низкими, хвост ротор может потерять эффективность. Несоблюдение курса может вызвать скользящая передача, чтобы поймать и перевернуть самолет набок.Большинство самолетов может выполнять скольжение с довольно высокой скоростью, если салазки направлены в сторону самолет движется.Перемещение циклической кормы назад во время скольжения
Человеческая природа — хотеть остановить скольжение как можно раньше, но движется Циклическая кормовая часть имеет две проблемы. Во-первых, главный ротор, вероятно, не генерирует большую тягу в этот момент, так что в любом случае это не сильно поможет. Другой это то, что махание максимальное, потому что обороты низкие, а перемещение циклического кормовая часть перемещает лопасти несущего винта еще ближе к хвостовой балке.Лопасти ротора попадание в хвостовую балку — вполне реальная возможность.пол кантрелл
пол на copters.com (замените «at» на «@», чтобы отправить мне электронное письмо — я надеюсь, это поможет избежать СПАММЕРОВ)
[Верхний] [Вверх] [Предыдущая] [Следующий]
Автоповорот или посадка с выключенным двигателем • Barossa Helicopters —
АВТОВРАЩЕНИЕ или двигатель выключен Посадка:
Нас часто спрашивают: безопасны ли они? Разве они не падают с неба, как камень? Так что в этом месяце мы думали, что поделимся с пилотами информацией об авторотации или отключении двигателя от посадки.Мы надеемся, что эта статья даст вам некоторое представление о том, как вертолеты приземляются без работающего двигателя.
Миф: Вертолеты упадут камнем при выключении двигателя. Фактически, у вас больше шансов выжить в вертолете с отказом двигателя, чем в самолете.
Вертолетыразработаны специально, чтобы позволить пилотам иметь разумные шансы на их безопасную посадку в случае, когда двигатель перестает работать во время полета, часто без каких-либо повреждений.Они достигают этого за счет авторотации лопастей несущего винта.
Кроме того, при получении лицензии пилота вертолета необходимо отработать посадку с использованием этой техники без мощности. На практике вместо того, чтобы полностью выключить двигатель, они обычно просто выключают двигатель настолько, чтобы отсоединить его от ротора. Таким образом, если учащийся столкнется с проблемой во время посадки без мощности, вертолет можно будет уменьшить, чтобы избежать аварии. Учитывая, что это невозможно при фактическом отказе двигателя, пилотам вертолетов крайне важно практиковать это, пока они не получат ответ.
Посадка через авторотацию также иногда необходима, если лопасти заднего несущего винта перестают работать должным образом, больше не противодействуя крутящему моменту лопастей несущего винта, поэтому вертолет будет вращаться, если двигатель не выключен. Независимо от того, произойдет ли это, и пилот выключит двигатель, или в случае фактического отказа двигателя, когда двигатель упадет ниже определенного количества оборотов в минуту, относительно скорости вращения ротора, специальный механизм сцепления, называемый блоком свободного хода, отключается. двигатель от несущего винта автоматически.Это позволяет основному ротору вращаться без сопротивления двигателя.
Как только двигатель выходит из строя или выключается по иным причинам, пилот должен немедленно уменьшить тангаж, уменьшая подъемную силу и сопротивление, и вертолет начнет снижаться. Если они не сделают это достаточно быстро, что приведет к слишком сильному падению оборотов несущего винта, они потеряют контроль над вертолетом и, скорее всего, не вернут его. Когда это произойдет, он вполне может упасть камнем. Однако это нетипично, потому что, как только блок свободного хода выключает двигатель, пилот обучается немедленно реагировать соответствующим образом.
Точный угол скольжения для поддержания оптимальной скорости вращения винта зависит от конструкции вертолета, но эта информация легко доступна в руководстве по эксплуатации вертолета. Угол планирования также меняется в зависимости от погодных условий (ветер, температура и т. некоторые оптимальные обороты, сохраняющие кинетическую энергию в лопастях.
Когда вертолет приближается к земле, пилот должен избавиться от большей части своего поступательного движения и замедлить спуск, используя накопленную кинетическую энергию в роторах.Если все сделано правильно, то посадка будет довольно пологой. Они достигают этого, выпуская ракету, поднимая нос в нужный момент. Это также будет иметь эффект передачи части этой энергии от поступательного импульса к несущему ротору, заставляя его вращаться быстрее, что в дальнейшем обеспечит плавную посадку. Поскольку вспышка часто должна быть несколько драматичной, сложная часть здесь — убедиться, что задняя часть вертолета не ударяется о землю. В идеале пилот выполняет сигнальную ракету (мы надеемся, что остановит большую часть движения вперед и замедлит приличное почти до нуля), а затем выровняет нос прямо перед приземлением.
Автоповорот может показаться довольно сложным и трудным делом, но, по словам одного инструктора, с которым я кратко беседовал об этом, на самом деле это не так уж и сложно по сравнению со многими другими аспектами управления вертолетом. Фактически, он заявил, что у большинства студентов гораздо больше проблем, когда они впервые пробуют такие вещи, как парение, чем при первой попытке приземления без мощности. Конечно, это частично связано с тем, что ученики не пробуют приземления с авторотацией, пока они не приблизятся к концу своего обучения, поэтому они более опытны, чем когда они впервые пробуют множество других маневров, но все же.Это, по-видимому, не так сложно, как кажется, и большинство проблем, которые возникают у студентов, возникают из-за того, что они нервничают при спуске с более высокой скоростью, чем обычно.
Вы можете увидеть видео, на котором кто-то выполняет почти идеальную посадку с авторотацией ниже:
дополнительных факта: Слово «вертолет» происходит от греческого «helix / helikos», что означает «спираль / вращение», и «pteron», что означает «крыло». Это, в свою очередь, привело к появлению французского слова hélicoptère, а затем английского «вертолет».Слово геликоптер было придумано в 1861 году Гюставом де Понтон д’Амекур. Первый задокументированный случай этого термина был в заявке на патент, поданной в апреле 1861 года во Франции на вертолет с паровым двигателем, изобретенный Габриэлем де ла Ландель.
- До изобретения муфты свободного хода, когда двигатели вертолетов выходили из строя, это приводило к замораживанию несущих винтов, что, конечно же, приводило к тому, что вертолет действительно падал более или менее как скала.
- Самый продолжительный зарегистрированный авторотация был достигнут в 1972 году Жаном Буле, который пытался установить рекорд высоты на вертолете, что он и сделал, и который стоит до сих пор.Ему удалось подняться на высоту 40 814 футов, когда его двигатель остановился из-за сильного холода (-63 ° C). Затем он авторотировал весь путь до хорошей безопасной посадки.
- Буле изначально хотел посадить свой вертолет Lama на вершине Эвереста (29 029 футов), чтобы продемонстрировать его возможности, но не смог получить на это разрешение, поэтому вместо этого просто решил установить мировой рекорд высоты в вертолет, которого он достиг, как описано.
- На самом деле существует разновидность одноместного персонального сверхлегкого вертолета, предназначенного для постоянных полетов с использованием самовращающегося основного лопасти.У этого вертолета сзади установлен двигатель с пропеллером, как у обычного самолета с задним двигателем. Сверху находится свободно вращающийся ротор, не подключенный к источнику питания и расположенный под углом «наклон вперед». Эти летательные аппараты взлетают так же, как и обычные самолеты, хотя обычно не требуют такой большой взлетно-посадочной полосы, поскольку ветер, создаваемый только задним двигателем, достаточно близок, чтобы заставить верхнюю самовращающуюся лопасть вращаться достаточно быстро при взлете. (Я лично видел, как один на авиашоу взлетал прямо вверх, и встречный ветер ему немного помогал).Если в них заглохнет задний двигатель, их можно будет безопасно посадить с помощью того же метода авторотации, что и на обычных вертолетах.
Эта статья скопирована с https://www.gizmodo.com.au/2015/06/how-helicopters-are-designed-to-land-safely-when-their-engine-fails/, так как это была одна из Самые простые для понимания статьи, которые мы читали об авторотационном полете.
Оценка рабочей нагрузки пилота для оптимальной процедуры посадки с авторотацией вертолета при отказе одного двигателя
Оценка рабочей нагрузки пилота для процедуры оптимальной авторотационной посадки вертолета при отказе одного двигателя
- Представлено на форуме 74
- 9 страниц
- Артикул: 74-2018-0120
- Ваша цена: 30 долларов.00
Присоединяйтесь или войдите, чтобы получить членская цена 15,00 $!
Оценка рабочей нагрузки пилота для процедуры оптимальной авторотационной посадки вертолета при отказе одного двигателя
Авторы / Детали: Сюйфэй Янь, Жэньлян Чен, Нанкинский университет аэронавтики и астронавтикиАбстракция
Этот документ предназначен для оценки рабочей нагрузки пилота при выполнении оптимальной процедуры посадки с авторотацией в случае отказа одного двигателя, чтобы предоставить ориентир для пилота, выполняющего фактический маневр посадки с авторотацией.В качестве образца для демонстрации взят вертолет UH-60A. Процедура посадки с авторотацией формулируется в виде нелинейной задачи оптимального управления (NOCP) на основе расширенной модели динамики полета твердого тела с шестью степенями свободы, решаемой методом коллокации и численной оптимизации. Оптимальная траектория посадки и средства управления сравниваются с данными летных испытаний. Метрики, называемые агрессивностью и частотой отсечки пилота, применяются для количественной оценки и оценки рабочих нагрузок пилота соответственно во временной и частотной областях на основе входных данных пилотного управления оптимального решения и данных летных испытаний.Результаты показывают, что оптимальная процедура посадки близка к данным летных испытаний, а анализ показателей показывает, что оцененная рабочая нагрузка пилота может считаться совместимой с данными летных испытаний.
Авторотация вертолета (Часть вторая)
Управление рисками во время обучения авторотации
В следующих разделах описываются расширенные рекомендации по авторотации во время обучения вертолету / вертолету, как указано в Консультативном циркуляре (AC) 61-140. Есть риски, присущие выполнению авторотации в тренировочной среде, в частности авторотации на 180 градусов.В этом разделе описываются приемлемые, но не единственные средства обучения соискателей сертификата летчика винтокрылого / вертолетного летательного аппарата для соответствия квалификационным требованиям для различных категорий винтокрылого / вертолетного аппарата. Вы можете использовать альтернативные методы обучения, если убедитесь, что они соответствуют требованиям Руководства по полетам на вертолете (HFH), стандартов практических испытаний (PTS) FAA и Руководства по летной эксплуатации вертолетов (RFM).
Авторотация с прямым входом
Авторотация с прямым входом — это авторотация с высоты без поворотов.Ветер очень сильно влияет на авторотацию. Сильный встречный ветер приводит к увеличению угла скольжения из-за меньшей путевой скорости. Например, если вертолет выдерживает 60 KIAS и скорость ветра составляет 15 узлов, то путевая скорость составляет 45 узлов. Угол спуска будет намного круче, хотя скорость спуска останется прежней. Скорость при касании и результирующий пробег по земле зависят от путевой скорости и величины замедления. Чем больше степень замедления или раската и чем дольше он удерживается, тем меньше скорость приземления и тем короче пробег по земле.На этом этапе следует проявлять осторожность, поскольку хвостовой винт будет ближайшим к земле компонентом вертолета. Если время неправильное и посадочная позиция не установлена в подходящее время, хвостовой винт может коснуться земли, вызывая момент тангажа носовой части вперед и возможное повреждение вертолета.
Встречный ветер является фактором, способствующим выполнению медленного приземления при спуске на авторотации, и снижает величину необходимого замедления. Чем ниже желаемая скорость при приземлении, тем точнее должны быть синхронизация и скорость факела, особенно на вертолетах с малоинерционными дисками несущего винта.Если слишком много коллективности применяется слишком рано на заключительных этапах авторотации, кинетическая энергия может быть исчерпана, что приведет к небольшому или отсутствующему амортизирующему эффекту. Это может привести к жесткой посадке с соответствующим повреждением вертолета. Как правило, лучше соглашаться на большее количество пробежек по земле, чем более жесткое приземление с минимальной путевой скоростью. По мере увеличения мастерства количество пробежек по земле может уменьшаться.
Рекомендации по летной грамотности Справочник Рода Мачадо «Как управлять самолетом» — Изучите основные основы управления любым самолетом.Сделайте летную подготовку проще, дешевле и приятнее. Освойте все маневры чек-рейда. Изучите философию полета «клюшкой и рулем». Не допускайте случайной остановки или вращения самолета. Посадите самолет быстро и с удовольствием.Техника (Практическое применение)
См. Рисунок 11-2 (позиция 1). Начиная с горизонтального полета с соответствующей воздушной скоростью (крейсерская или рекомендованная изготовителем), на высоте 500–700 футов над уровнем земли (AGL) и двигаясь против ветра, плавно, но уверенно опустите коллектив в полностью опущенное положение.Используйте циклический режим на корме, чтобы предотвратить занижение носовой части при сохранении оборотов ротора по зеленой дуге с коллективным движением. Если коллектив находится в крайнем нижнем положении, скорость вращения ротора регулируется механическими ограничителями шага. Во время технического обслуживания упоры ротора должны быть настроены так, чтобы обеспечить минимальные авторотационные обороты при небольшой нагрузке. Это означает, что коллектив все еще может быть сокращен даже в условиях резкого снижения вертикальной нагрузки (например, очень малый вес вертолета на высоте очень низкой плотности).После входа в режим авторотации общий шаг необходимо отрегулировать для поддержания желаемой частоты вращения ротора.
Рисунок 11-2. Прямой авторотации.Координируйте коллективное движение с помощью соответствующей педали против торможения для дифферента и применяйте циклическое управление для поддержания надлежащей воздушной скорости. После того, как коллектив полностью опущен, уменьшите дроссельную заслонку, чтобы обеспечить чистое разделение / разделение игл. Это означает, что частота вращения ротора увеличивается до более высокой скорости, чем частота вращения двигателя — явный признак того, что блок свободного хода позволил двигателю отключиться.После разделения игл отрегулируйте дроссельную заслонку так, чтобы частота вращения двигателя оставалась выше нормальной скорости холостого хода, но не настолько высокой, чтобы иглы снова соединились. Рекомендации производителя по скорости снижения авторотации см. В RFM.
В положении 2 циклически отрегулируйте положение, чтобы получить рекомендованную производителем скорость авторотации (или наилучшую скорость скольжения). При необходимости отрегулируйте коллектив, чтобы поддерживать частоту вращения ротора в нижней части зеленой дуги (см. Стр. 11-2). Кормовые циклические движения вызывают увеличение оборотов ротора, которое затем контролируется небольшим увеличением коллектива.Избегайте большого коллективного увеличения, которое приводит к быстрому спаду оборотов ротора и ведет к «погоне за оборотами». Не смотрите прямо перед дроном. Постоянно проверяйте положение, дифферент, частоту вращения ротора и скорость полета.
На высоте, рекомендованной изготовителем (положение 3), начните разгон с задним циклическим режимом, чтобы уменьшить скорость полета вперед и уменьшить скорость снижения. Держите курс с педалями против торможения. Во время розжига поддерживайте обороты ротора в зеленом диапазоне. При выполнении сигнальной ракеты необходимо следить за тем, чтобы циклический подъемник не сдвинулся назад ни так резко, чтобы вертолет начал набирать высоту, ни так медленно, чтобы не остановить снижение, что может позволить вертолету успокоиться так быстро, что рулевой винт ударяется о землю.В большинстве вертолетов правильное положение ракеты приводит к замедлению полета по земле. Когда поступательное движение уменьшается до желаемой наземной скорости — обычно минимально возможной скорости (положение 4) — переместите циклический подъемник вперед, чтобы установить вертолет в правильное положение для посадки.
Это действие дает студенту представление о том, в каком положении планера следует избегать, потому что пилот никогда не должен допускать контакта с землей, если вертолет не находится ниже его носа. Ограничение факела таким положением может привести к немного более высокой скорости приземления, но исключит возможность удара рулевого винта о ровные поверхности.
Высота шасси в это время должна составлять приблизительно 3–15 футов над уровнем земли, в зависимости от высоты, рекомендованной производителем. По мере уменьшения кажущейся наземной скорости и высоты вертолет необходимо вернуть в более ровное положение для приземления, применив циклическое движение вперед. Некоторые вертолеты можно приземлить на пятки в слегка приподнятом положении, чтобы помочь уменьшить скорость движения вперед, тогда как другие должны приземлиться на полозьях или на уровне шасси, чтобы равномерно распределить посадочные нагрузки на все шасси.Следует проявлять крайнюю осторожность, чтобы избежать чрезмерно высокого положения носа и опускания хвоста ниже 10 футов. Вертолет должен находиться близко к посадочной позиции, чтобы рулевой винт не касался поверхности.
На этом этапе, если необходимо выполнить посадку с полным приземлением, разрешите вертолету снизиться вертикально (положение 5). Это коллективное приложение использует часть кинетической энергии в диске ротора, чтобы помочь снизить скорость снижения вертолета. Когда коллектив поднят, потребуется противоположная педаль против торможения, используемая в полете с приводом, из-за трения внутри трансмиссии / привода.Приземляйтесь в горизонтальном полете.
Реакция управления при увеличенных углах тангажа будет немного отличаться от нормальной. С уменьшением частоты вращения несущего винта уменьшается сила противодействия (педали реагируют медленнее), что требует больших управляющих воздействий для поддержания курса при касании.
Некоторые вертолеты, такие как Schweitzer 300, имеют наклонный стабилизатор оперения. При наклонном стабилизаторе критически важно, чтобы пилот постоянно нажимал на педаль соответствующим образом во время авторотации.В противном случае хвостовая балка имеет тенденцию качаться вправо, что позволяет наклонному стабилизатору поднимать хвост. Это может привести к сильной складке носа, которая быстро исправляется нажатием правой педали.
Восстановление мощности может быть выполнено во время тренировки вместо полной приземления. Обратитесь к разделу, посвященному восстановлению питания, чтобы узнать о правильной технике.
После полной остановки вертолета после приземления опустите общий шаг в крайнее нижнее положение. Не пытайтесь остановить движение по земле с помощью задних циклов, так как лопасти несущего винта могут удариться о хвостовую балку.За счет небольшого опускания коллектива во время пробега по земле на посадочную тележку накладывается прибавка веса, замедляющая вертолет; однако это зависит от состояния посадочной поверхности.
Одной из распространенных ошибок является удержание вертолета от поверхности по сравнению с его опорой на поверхность во время авторотации. Удерживание вертолета в воздухе с использованием всей кинетической энергии вращения ротора обычно вызывает жесткую посадку вертолета, в результате чего лопасти изгибаются вниз и соприкасаются с хвостовой балкой.Обороты винта следует использовать для смягчения вертолета на поверхности для контролируемой плавной посадки вместо того, чтобы позволить вертолету упасть на последних нескольких дюймах.
Общие ошибки
- Непонимание важности немедленного включения авторотации при отказе силовой установки или трансмиссии.
- Недостаточное нажатие педали против торможения при уменьшении мощности.
- Слишком резкое опускание носа при уменьшении мощности, что приводит к погружению вертолета.
- Отсутствие надлежащих оборотов ротора во время спуска.
- Применение общего шага на большой высоте, приводящее к жесткой посадке, потере контроля курса и возможному повреждению рулевого винта и упоров лопастей несущего винта.
- Невозможно выровнять вертолет или достичь положения, предпочтительного для посадки производителем.
- Неспособность минимизировать или исключить боковое смещение при контакте с землей. (Аналогично пунктам 8 и 9)
- Неспособность поддерживать контакт с землей в воздухе и удержание шасси в соответствии с направлением движения во время приземления и контакта с землей.
- Невозможность (при пробном запуске) обойти, если не в пределах и установленных критериев для безопасного авторотации.
Летная грамотность рекомендует
Автоповорот вертолета, это действительно искусство
Автоповорот вертолета
См. Также: FAA AC 61-140 и IHST Real Autorotations и FAA Planning Autorotations. Всегда помните, что летная подготовка — это серьезно. Это не шутка, особенно при отработке авторотации.
В авиации время от времени вы будете слышать термин «фактор морщинистости». Это может быть плохая погода, может быть турбулентность, или это может быть что угодно. Если вы действительно хотите поднять у ученика «фактор морщинистости», просто скажите «Авторотация».
Почему студенты боятся авторотации? Обычно это связано с тем, что они связаны с чрезвычайными ситуациями. В некоторых случаях это может быть связано с тем, что они читали статьи, в которых кривая H / V называется «кривой мертвого человека». Мне лично не нравится последний термин, так как это сленг, который оставляет ложное негативное впечатление.Прочтите о том, как строится кривая H / V. Студенты должны понимать, что во время летной подготовки отрабатываются авторотации для имитации аварийных ситуаций, никогда не допускается создание реальной аварийной ситуации путем фактического выключения двигателя. В большинстве случаев, когда во время тренировочного авторотации происходит авария, это связано с тем, что в первую очередь существовало чувство дискомфорта, которое привело к опасениям, что, в свою очередь, приводит к напряжению на органах управления. Об этом следует поговорить перед любым сеансом полета, который будет включать тренировочные авторотации.Если ученик чрезмерно напряжён, то, вероятно, лучше подождать; Возможно, сейчас не самое подходящее время для критического маневра. Хотя многие инструкторы хотят вводить авторотацию на ранних этапах обучения, полезно отложить их на несколько часов, пока ученик не почувствует себя в целом более комфортно.
Я преподавал на нескольких разных марках / моделях вертолетов, но независимо от того, чем я летаю, я всегда учу одинаково. Некоторые элементы, относящиеся к вертолету, могут отличаться, например, скорость полета и т. Д., Но способ, которым я обучаю, никогда не меняется.Я также провожу тренинг по осведомленности Робинсона, необходимый для SFAR 73, каждого нового студента, независимо от того, на каком самолете мы будем летать; в основном потому, что это просто хорошая идея, а также потому, что знания всегда полезны. Робинсон в своих бюллетенях по безопасности предостерегал от дроссельной заслонки при отработке авторотации, и я поддерживаю это предостережение. Гораздо лучше расслабить студента с помощью консервативных подходов к авторотации вначале, а затем увеличивать скорость ввода по мере того, как время прогрессирует, и ученик становится более комфортным.Вырубать дроссельную заслонку и грохотать коллектив — плохая техника, но многие пилоты думают, что именно так и следует поступать. Использование этого метода для разгрузки несущего винта двухлопастного вертолета, как учат многие летные инструкторы, авторотации, также небезопасно.
С самого начала — Обучая студента авторотации, я начинаю с очень консервативного входа в авторотацию, а затем медленно увеличиваю скорость входа, чтобы позволить ученику освоиться с маневром.Я всегда начинаю с установки более длинного, чем обычно, захода на посадку на высоте около 1200 футов над уровнем земли и на воздушной скорости, чуть превышающей лучшую воздушную скорость авторотации. Такая установка устранит любые агрессивные управляющие воздействия при входе и даст студенту время, чтобы увидеть, что на самом деле происходит. Вход в режим авторотации всегда должен включать задний циклический вход, который предотвращает разгрузку ротора, а также помогает удерживать частоту вращения ротора от чрезмерного спада.
На фото это был Bell 47 G5, которым я владел в конце 90-х, в факеле авторотации в аэропорту Джумболэр (Грейстоун), Окала, Флорида, где я в то время базировался.
Также полезно, чтобы ученик просто слегка следил за инструктором по элементам управления, чтобы почувствовать правильные входные данные. Войдите в режим авторотации, плавно опуская коллектив до упора, а затем отключите дроссель для раскола иглы закрепки, убедитесь, что дроссель находится на холостом ходу. На многих вертолетах необходимо будет немного поднять коллектив, чтобы зафиксировать обороты ротора в верхней части зеленой дуги. Как и в случае с входом, прекращение должно быть консервативным.Плавно поверните дроссельную заслонку вверх, чтобы соединить иглы, когда вы проходите через 300 футов над уровнем земли; затем завершите завершение, переведя вертолет в режим зависания на нормальной высоте.
Не должно быть необходимости в агрессивных управляющих входах. Все должно быть гладко, и инструктор должен много говорить, поскольку он / она подробно описывает все, как это делается, включая сканирование инструментов.
Четыре ключевых элемента успешного авторотации
Airspeed — Воздушная скорость часто подчеркивается как один из самых важных аспектов успешного авторотации.Это зависит от того, с кем вы разговариваете в данный момент, другие могут сказать что-то еще, например, вспышку. Изначально мы хотим быть на оптимальной скорости авторотации или выше перед входом в самолет. Это лучший сценарий, который легче всего выполнить, и он очень безопасен из-за большой свободы действий.
Опубликованная воздушная скорость авторотации является оптимальной, которая обеспечивает наилучшие общие характеристики авторотации. То, что часто не преподается или даже не известно в этом отношении, — это тот факт, что почти все вертолеты достигают наилучшего планирования (наибольшего расстояния) с воздушной скоростью на 25-30% большей, чем опубликованная воздушная скорость для минимального снижения.Кроме того, верно то, что почти все вертолеты могут иметь авторотацию для более крутого захода на посадку с воздушной скоростью на 25-30% медленнее, чем опубликованная. Почему же тогда этим техникам не обучают? Во-первых, потому что эти факты обычно не известны, а во-вторых, если они известны, этому не учат до тех пор, пока ученик не достигнет определенного уровня навыков, потому что это продвинутые методы, требующие особой точности.
Хотя я могу продемонстрировать эти методы, потому что я хочу посеять семена для будущего использования учеником, я не учу их, пока ученик не продемонстрирует отличный уровень контроля, который обычно не достигается до обучения на коммерческом уровне.Если я чувствую, что какой-то конкретный ученик не несет ответственности, я никогда не буду обучать какой-либо продвинутой технике. Для получения дополнительной информации по этой теме см. Расширенную технику далее в этом тексте.
Обороты ротора — Это самый важный ингредиент успешного авторотации. Без достаточных оборотов ротора вы превратитесь в кирпич. В случае фактического отказа двигателя у вас будет очень ограниченное количество времени, чтобы полностью разогнать коллектив, чтобы восстановить потерянные обороты ротора, и вам будет что-то выиграть.После того, как коллектив полностью выйдет из строя, им нужно управлять, чтобы поддерживать приемлемые обороты ротора в зеленой дуге. В случае легкого самолета может быть необходимо поддерживать коллектив в полностью опущенном положении, чтобы поддерживать обороты в нижних пределах зеленой дуги, а в других случаях, таких как тяжелый самолет, может потребоваться для увеличения общего шага, чтобы контролировать тенденцию к превышению скорости. Как и в случае с воздушной скоростью, существует приемлемый диапазон, однако частота вращения всегда должна быть в пределах диапазона, указанного в относительном RFM (POH).
Я имел обыкновение говорить, что обороты должны поддерживаться в пределах зеленой дуги, но вы заметите, что зеленая дуга в некоторых самолетах меньше, чем диапазон оборотов, который является приемлемым для лучшего авторотации глиссады. Это может привести к тому, что предупредительный звуковой сигнал будет звучать непрерывно, и в этом случае вы должны быть предельно осторожны, чтобы не привыкнуть к его звучанию и забыть внимательно следить за своими оборотами визуально.
Зона приземления — Это очень важный аспект любой вынужденной посадки, особенно в отношении вертолетов.Обратите внимание, что с высоты 500 футов над уровнем земли вы окажетесь на земле всего за 20 секунд, поэтому у вас нет времени искать подходящую площадку для приземления после отказа двигателя. Для отработки авторотации всегда следует использовать взлетно-посадочную полосу.
Если во время отказа двигателя вы сразу не повернетесь к месту приземления и не будете держать его в поле зрения, вы вряд ли доберетесь до него. Также важно, чтобы вы не пытались попасть в зону приземления, которая находится вне досягаемости.Многие несчастные случаи произошли в результате попытки продлить глиссирование до недоступной зоны приземления. Всегда помните, что гораздо лучше сделать хороший авторотацию на плохую площадку для посадки, чем сделать плохую авторотацию на хорошую площадку. Если сомневаетесь, возьмите что-нибудь поближе, даже если это деревья, но сделайте хороший авторотацию.
Flare — Здесь ваша скорость снижения и воздушная скорость используются для настройки точки приземления. Пилот завода Bell однажды сказал мне: «Если ты больше ничего не будешь делать, стреляй».Если вы настроили стабилизированное авторотацию, в вашем снижении и воздушной скорости сохраняется огромное количество энергии, и в вашем распоряжении для завершения. Во время факела частота вращения ротора обычно значительно увеличивается.
Последние 100 футов
Если вы сделали все правильно, как обсуждалось выше, все, что вам нужно сделать сейчас, — это разжечь и вытащить коллектив, но все это должно быть как раз в нужное время. Эти последние 100 футов длится всего 5-6 секунд и являются самой медленной частью авторотации.
Когда вертолет проходит через 100 футов над уровнем земли, вы должны быстро проанализировать свою скорость снижения и скорость относительно земли. Вы должны решить, будете ли вы инициировать слабую вспышку, более агрессивную вспышку или немного задержать вспышку. Если вы инициируете вспышку, вы решите, достаточно или недостаточно. Если этого недостаточно, вы увеличиваете засветку на протяжении оставшегося спуска. Если этого было достаточно, вы отложите увеличение факела до 10 футов над уровнем моря. Если вы вспыхнули слишком сильно, слишком рано, вы ничего не можете с этим поделать, если только это не тренировочный авторотация, и в этом случае вы должны увеличить газ и как можно скорее восстановиться.В реальной ситуации неудачи, если вы начнете вспыхивать слишком рано, вы сильно приземлитесь.
Прекращение восстановления мощности — если вы не начали увеличивать дроссельную заслонку при прохождении 300 футов, тогда, когда вы инициируете факел и до 10 футов над уровнем земли, плавно поверните дроссельную заслонку вверх, чтобы соединиться со стрелками тахометра. Не ждите, пока вы будете готовы применить коллектив, чтобы закатать дроссель; это вызовет превышение скорости и сильное рыскание. Во время практики авторотации для восстановления мощности вполне допустимо прибавить дроссель в любое время после 500-300 футов над уровнем земли.Важно, чтобы дроссельная заслонка открывалась плавно.
По мере того, как вы проезжаете 10 футов над уровнем земли, увеличивайте коллектив, чтобы вертолет завис. В этом окончании встречаются некоторые обучающие вариации. Некоторые инструкторы научат вертолет устойчиво зависать без движения вперед. Если обучать этой технике, необходимо заканчивать с опущенным хвостом, поскольку вертолет переводят в режим зависания с задним циклическим режимом. Я не одобряю эту технику, потому что в случае реальной неудачи это приведет к срезанию хвостовой балки.Я учу выравнивать вертолет по мере увеличения коллектива и принимать поступательное движение так же, как и в случае настоящего провала. Затем, если хотите, можете замедлить вертолет до зависания или перейти к другому.
Прерывание на землю — Проходя последние 10 футов авторотации, вы должны выровнять вертолет и применить коллектив в нужное время. В самый подходящий момент будет около 3 футов над уровнем моря. Крайне важно, чтобы вы выровняли вертолет (циклическое движение вперед), а затем больше не производили циклических входов в корму.Желательно, чтобы в это время у вас была путевая скорость 20 узлов или меньше. Если это настоящий провал, вы должны смириться с любой скоростью и держать циклическую скорость вперед. Единственное, что в это время будет делать кормовой велосипед, — это укоротить хвостовую балку.
Методика коллективного применения может варьироваться в зависимости от техники пилота и / или вертолета, на котором вы летите. Например, в Robinson R22 вы будете применять коллектив полностью и плавно, проходя через 3 фута. В вертолете Bell, который имеет ротор с более высокой инерцией, хорошей техникой является легкое нажатие на коллектив, а затем плавное включение коллектива по мере необходимости для приземления.В конечном счете, любой метод будет работать на любом вертолете при правильном использовании.
ЗАПРЕЩАЕТСЯ агрессивно опускать коллектив во время оползня. Вместо этого сохраняйте коллективное положение, пока вертолет останавливается, или медленно опускайте его. В некоторых случаях предпочтительнее продолжать увеличивать коллектив во время слайда, если таковой имеется. Резкое опускание агрегата на липкой почве может вызвать скатывание вперед, если салазки заедают.
ЗАПРЕЩАЕТСЯ вводить циклическое движение назад во время скольжения по земле, он не будет делать ничего, кроме того, что может отрубить хвостовую балку.
Просмотрите некоторые параметры авторотации.
Минимальная скорость снижения: Такая конфигурация желательна, если вам нужно маневрировать к ближайшей к вам площадке приземления. В этом сценарии вы установили максимальную скорость снижения и теперь поддерживаете частоту вращения ротора в зеленой дуге; у вас будет минимальная скорость снижения, которую вы можете достичь в вашей текущей конфигурации, и у вас может быть больше времени для маневра в близкую зону приземления.Учтите, что это НЕ лучший сценарий расстояния! Это просто даст вам лучшее время на спуске, но вы не будете преодолевать большую территорию. Обратите внимание, что в режиме авторотации ваша скорость снижения будет варьироваться от 1300 до 1800 футов в минуту.
Лучшее скольжение: Эта конфигурация желательна, если в момент сбоя вы двигались по пересеченной местности и вам действительно нужно было добраться до более качественного грунта. Здесь вы будете настраиваться на лучшую скорость полета одновременно с настройкой коллектива, чтобы установить частоту вращения ротора на ту, которая указана в RFM как лучшая скорость скольжения.Обратите внимание, что во время прекращения с наилучшей конфигурацией скольжения вы можете и должны снизить совокупность в факеле, что приведет к некоторому увеличению оборотов, а также поможет в прекращении.
Важно: В случае фактического отказа, а также во время практики обязательно всегда сначала настраивать стабилизированное авторотацию, а затем настраивать желаемую конфигурацию. Может не хватить времени на корректировку, как это обычно бывает с малолетними пилотами. Всегда устанавливайте оптимальную воздушную скорость и стабилизируйте обороты по зеленой дуге, а затем отрегулируйте оттуда, если позволяет время.
Вы видите то, что получаете: Как студент или младший пилот, развивающий навыки, важно понимать, что стабилизация ситуации является основной целью. Это никогда не меняется, однако время, необходимое для стабилизации, уменьшается с увеличением опыта. После того, как вы спустились через 300 футов над уровнем земли, уже поздно менять то, что у вас есть в случае реальной чрезвычайной ситуации; теперь то, что вы видите, это то, что вы получаете; просто держи его стабильно. Во время тренировок на авторотации на высоте 300 футов над уровнем земли вы должны либо стабилизироваться, либо плавно прекратить авторотацию (плавно увеличивайте дроссельную заслонку до максимума зеленых оборотов в минуту, затем увеличивайте общий уход на второй круг).При реальной неудаче на этом этапе (300 футов над уровнем моря) вы должны сосредоточиться на том, чтобы максимально использовать то, что у вас есть.
Early Abort: При отработке авторотации важно распознать нестабильное авторотацию и прервать ее раньше. Не продолжайте нестабильное авторотацию до нестабильного завершения или сбоя. Немедленно прервите нестабильное авторотацию, как только заметите нестабильность или условия охоты, и попытайтесь сделать еще одну попытку.
Чем авторотация Vne отличается от управляемой полетной Vne? В учебно-тренировочном самолете обычно нет разницы, и вы, вероятно, не заметите, что в некоторых самолетах есть другой Vne для авторотации.Авторотация Vne обычно отмечается на указателе скорости вертолета синей радиальной линией. Это существует на более крупных вертолетах, которые обычно быстрее учебно-тренировочных самолетов. Возьмем, к примеру, Robinson R44; Этот самолет имеет авторотацию Vne, равную 100 узлам, и обозначен синей радиальной линией на указателе скорости. Bell 206 Jet Ranger похож.
Помните, что восходящий поток воздуха через главный ротор — это то, что приводит в движение роторную систему при авторотации.Если ваша воздушная скорость слишком высока, вы не сможете добиться достаточного восходящего потока, и частота вращения ротора снизится.
Продвинутые методы авторотации
Как только пилот освоится с авторотацией и когда он или она увидит и поймет, что вертолет не отличается авторотацией от полета с двигателем, тогда этим методам можно обучить, использовать и экспериментировать. Я не имею в виду, что вы должны экспериментировать с чем-то непроверенным или не продемонстрированным вам.Лучше, чтобы рядом с вами сидел квалифицированный инструктор, который будет держать вас в пределах безопасности. Никогда не позволяйте себе раньше времени стать летчиком-испытателем!
Airspeed — Вертолет имеет авторотацию на любой скорости (ниже авторотации Vne). Это означает, что он будет нормально вращаться на нулевой скорости, но у вас будет высокая скорость снижения. Такая более высокая скорость снижения приемлема при условии, что в нужное время (выше кривой H / V) вы наберете скорость, необходимую для разумной вспышки и / или приземления.Эта воздушная скорость лучше всего составляет 45 узлов или выше, чтобы совершить безопасную и неразрушающую посадку, однако уровень навыков пилота должен быть выше, чем у студента или частного пилота на этих более низких скоростях. Вертолет может даже лететь назад на авторотации без каких-либо опасностей, кроме того факта, что вы должны набрать прямую воздушную скорость до приземления. Вы также должны иметь в виду, что частота вращения ротора может значительно снизиться, особенно при прямом циклическом вводе, при управлении циклическим с использованием передовых методов авторотации.
Маневрирование — Самое важное, что нужно помнить, когда дело доходит до маневрирования при авторотации, — это выполнять маневры как можно раньше, особенно при отработке авторотации на 180 градусов со студентами. Стойте стабильно и делайте повороты. Вертолет на авторотации маневренен не меньше, чем на двигателе. Единственное, что вы должны сделать, это поддерживать частоту вращения несущего винта в допустимом диапазоне и лететь на вертолете туда, куда вы хотите. Это действительно так просто. Никогда не прекращайте управлять самолетом.
RPM — Что контролирует частоту вращения ротора при авторотации? Коллективное право? Что еще? Коллектив напрямую регулирует частоту вращения ротора через шаг лопастей ротора. Циклический привод также регулирует частоту вращения ротора за счет нагрузки на диск. Если вы будете поддерживать авторотацию прямо, коллектив — единственное средство контроля оборотов. Если вы будете делать какие-либо повороты, в зависимости от того, насколько крутым, вам, возможно, придется манипулировать коллективом, чтобы предотвратить превышение скорости.Это потому, что вы увеличили перегрузку на диске ротора в свою очередь, что увеличило скорость вращения ротора. Если вы введете прямой цикл, вы уменьшите перегрузку ротора, и обороты ротора также уменьшатся. Следует проявлять осторожность при вводе прямого циклического ввода из-за того, что произойдет снижение частоты вращения ротора на 5% или более.
Вот вам сценарий ответа — При самостоятельном полете на высоте 1200 футов над уровнем моря и на скорости 80 KIAS вы внезапно и без предупреждения теряете двигатель.Благодаря хорошей тренировке вы быстро опускаете коллектив до упора, но, к вашему большому удивлению, частота вращения ротора остается в понижательной тенденции, которая теперь меньше нижних пределов зеленой дуги. Что вы сделаете, чтобы вернуть потерянные обороты? Большинство ответит засветкой, это сработает? Что вы думаете? Ответьте на: [email protected] Я отвечу вам с правильной информацией.
Немного больше высоты действительно имеет значение? Да, и нет никаких аргументов против этого факта.Каждые 100 футов высоты добавляют примерно 4 секунды к вашему времени планирования, и каждая секунда на счету. Это означает, что если вы обычно летите на высоте 500 футов над уровнем земли и увеличиваете высоту всего на 100–600 футов над уровнем земли, вы увеличиваете свое потенциальное время планирования на 20 процентов. Увеличение времени планирования на 20 процентов при увеличении высоты на 100 футов — это БОЛЬШАЯ разница. КОНЕЦ. Вернуться к началу
Количественная оценка нагрузки пилотов во время аварийных полетов вертолета: анализ физиологических параметров во время авторотации
Основной целью кампании по летным испытаниям вертолетов было получение данных самолета с помощью приборов для летных испытаний (FTI) и пилотов. данные с помощью специальных физиологических датчиков.Эти данные были проанализированы и сопоставлены с результатами традиционных методов для проверки гипотез, предложенных в этом исследовании, и для руководства будущими исследованиями, как показано на рис. 1a.
Рис. 1(a) Блок-схема эксперимента и предложенная методология. (b) Вертолет AS-350 и его летно-испытательная аппаратура (FTI). (в) Этапы авторотации. Положение рычага управления топливом (DδT). Скорость газогенератора турбины (Нг). Вариация отношения (Δθ).Высота (H). Скорость полета (Vi).
Участники
Одиннадцать элитных военных летчиков вызвались участвовать в этой кампании. Все добровольцы были инструкторами по пилотированию вертолетов с опытом полетов более 2000 часов. Хотя все пилоты обладали значительным летным опытом, на основе специальной подготовки, необходимой для выполнения маневров авторотации, мы предсказали, что их субъективная рабочая нагрузка, физиологические реакции и количественные записи управления полетом можно разделить на три группы: (1) опытные пилоты-испытатели i.е. инструкторы по авторотации, с более чем 3000 посадок на полной авторотации каждый; (2) летчики-испытатели, имевшие опыт летных испытаний, но имеющие лишь несколько сотен полных авторотаций; и (3) боевые пилоты, военные пилоты, которые служили в оперативных эскадрильях ВВС Бразилии и армии, не имея опыта полных авторотаций. Это разделение было принято как способ снижения рисков, учитывая, что все полеты выполнял опытный летчик-испытатель, выполнявший функции второго пилота.
Кампания летных испытаний была настроена для оценки субъективных реакций пилотов на различных участках диаграммы высота-скорость в рамках их рабочих обязанностей, физиологические реакции пилотов регистрировались.Этический комитет больницы Исраэлита Альберта Эйнштейна одобрил все процедуры (CAAE 72744717.7.0000.0071). Все добровольцы, которые согласились участвовать, подписали форму информированного согласия. Это исследование было выполнено в соответствии со всеми соответствующими руководящими принципами и правилами.
Летная кампания
Одномоторный вертолет бразильских ВВС модели AS-350 со специальной аппаратурой для летных испытаний (FTI) использовался во время всех полетов (рис. 1b). FTI имел частоту сбора данных 64 Гц, а полетные данные регистрировались аппаратурой КАМ-500 (РИПРОГ).Самолет был оснащен прибором инерциального измерения (IMU), который обеспечивает измерение угловой скорости относительно оси x ( p ), оси y ( q ) и оси z ( r ), так как а также углы тангажа ( Θ ), крена ( Φ ) и рыскания ( Ψ ). Также была система для измерения вводимых пилотом команд, таких как Коллективное ( Dδc ), Боковое ( Dδl ) и Продольное ( Dδm ) положения управления по тангажу. В состав оборудования входили также положение и количество рычага управления топливом ( DδT ), частота вращения газогенератора двигателя (Ng), крутящий момент (Tq) и частота вращения несущего винта (Nr), дополненные данными GPS, а также внутренняя / внешняя камеры (рис.1б). Полный список условных обозначений представлен в конце рукописи (таблица 1).
Ответы на данные летной механики были непрерывно записаны, и три основных точки регистрации были стандартизированы: отказ двигателя (когда двигатель стабилизировался в режиме холостого хода: Ng = 65%), вход авторотации (когда пилот начал движение, чтобы опустить положение двигателя). коллективное управление), и в начале вспышки (когда изменение продольного положения самолета стало положительным, уже близко к земле: ∆ θ > 0).В полете параметры управлялись пилотами с включением авторотации, как только Ng достигало 65%. Согласно руководству по летной эксплуатации самолета, ракета была запущена на высоте 65 футов и была подготовлена к посадке на высоте от 20 до 25 футов. Анализ данных, записанных FTI, был проанализирован с параметрами, автоматически полученными скриптами Matlab. Эти точки выполняют три этапа авторотации: (1) вход в авторотацию, (2) стабилизированный авторотацию и (3) факел и посадку (рис.1в).
Как упоминалось ранее, один из самых сложных маневров для пилота вертолета — авторотация — должен быть выполнен после неожиданной неисправности, особенно на одномоторном самолете. Этот маневр создает большую нагрузку на пилота, который должен выполнять все задачи, необходимые для безопасной посадки 9 . Диаграмма высота-скорость (рис. 2) помогает оценить соответствующую рабочую нагрузку. Эта кривая определяет небезопасные условия полета, касающиеся исключительно скорости, высоты самолета и, как следствие, сложности выполнения авторотации 11 .Эти условия могут стать основой для выбора различных уровней сложности выполнения маневра. Следовательно, несмотря на то, что «за пределами» кривой, в целом может быть безопасно выполнить авторотацию, однако, находясь «внутри», даже опытные пилоты не смогут избежать фатальной аварии.
Рисунок 2 Диаграммавысота-скорость и четыре предложенных перегородки, т. Е. Высокая высота, крейсерская, коленная и взлетная. В таблице в правом верхнем углу показаны комбинации высоты и скорости, протестированные во время тестовой кампании, а также их различные кодировки (Буква-Число).
Каждый пилот провел от 12 до 27 полных авторотаций с разными комбинациями высоты и скорости, которые соответствовали разным уровням сложности и ожидаемым рабочим нагрузкам. Соответствующие авторотации изображены красными треугольниками на рис. 2. Топливный рычаг был переведен в положение холостого хода (Ng = 65%) для имитации отказа двигателя. По крайней мере, один маневр был выполнен неожиданно.
Каждый пилот выполнил два полета, кроме пилота №6, который выполнил все маневры за один полет.Мы определили и оценили две разные классификации выполняемых маневров (рис. 2).
Классификация (a) соответствует классическому распределению, включая точки Снаружи [O] (C1, C2, D3, E1, E5, F3 и G3), точки на предельной линии [L] (D2, E2, E4, F2, G2 и h3) и точки внутри диаграммы высота-скорость [I] (D1, E3A, E3B, F1, G1 и h2).
Классификация (b) согласовывала разделение на четыре зоны с учетом типов и методов маневрирования, необходимых для каждой из этих перегородок, i.е., Взлет (B3 и C1), Колено (D1, D2, D3, h2, h3 и h4), Крейсерский полет (G1, G2, G3, F1, F2, F3, E3B, E4 и E5) и High-hover (E1, E2 и E3A). Точка A1, хотя и была проверена, не была частью анализа, поскольку самолет касается земли менее чем за секунду, и у него не было времени полностью использовать органы управления полетом или измерить физиологические изменения.
Количественная оценка эффективности
Первая задача этого исследования включает определение количественных критериев для измерения рабочей нагрузки во время маневров авторотации при сохранении того же стандарта производительности для всех пилотов.Среди всех существующих моделей мы решили использовать в качестве основы для исследования ту же методологию элементов задачи миссии (MTE), которая принята в Стандарте авиационного проектирования-33 (ADS-33) 24 .
Этот стандарт определяет критерии и характеристики управляемости для ряда вертолетов, от разведывательных и атакующих до грузовых и грузовых 25 . Среди всех количественных и качественных методов ADS-33 есть определения задач, которые должны быть оценены со стандартом производительности, чтобы результат мог достичь желаемого или адекватного уровня.ADS-33 не упоминает об аварийных маневрах, таких как авторотация. Однако, поскольку метод был уже известен и применялся пилотами-испытателями, участвовавшими в нашем исследовании, мы решили адаптировать метод, создав MTE на основе основ разработки с исходным ADS-33, как описано в документе Test Guide. для ADS-33 PRF 26 и Справочная информация и руководство пользователя (BIUG) для обработки требований к качеству военного вертолета 27 , которые адаптировали задачи авторотации для типа MTE.
Процесс создания MTE этой авторотации был изучен, разработан и испытан на более чем 3000 моделируемых авторотаций, выполненных в школе летных испытаний ВВС Бразилии (IPEV). Результаты были представлены и обсуждены на Европейском форуме вертолетов в 2014 и 2019 годах 28,29 и на Ежегодном форуме Американского вертолетного общества в 2015 году 30 . Условия, введенные в этой разработке, предполагали, что самолет не должен выходить за пределы каких-либо конструктивных ограничений во время маневра, чтобы оставаться в пределах границ диапазона полета, утвержденных изготовителем самолета, и позволять безопасно выполнять полный маневр.
Мы считаем, что все факторы, влияющие на характеристики авторотации вертолета, являются результатом аэродинамики и эффективности преобразования кинетической и гравитационной потенциальной энергии в скорость вращения несущего винта (Nr) 28,31 . Наиболее важными изучаемыми факторами были факторы, связанные с вертикальной и горизонтальной скоростью во время приземления. Вертикальная скорость является наиболее важной и может представлять более высокий потенциальный риск серьезной аварии с вертолетом из-за замедления выше 20G 32,33 .В ходе исследования мы решили, что вертикальная скорость будет рассматриваться не как характеристика, а как критерий безопасности, при этом должна быть принята максимальная вертикальная скорость 2 м / с.
Пилоты были оценены с точки зрения рабочей нагрузки, необходимой для выполнения каждой полной аварийной посадки, в соответствии со шкалой HQR 17 и их характеристик (желательных или адекватных) в соответствии с предложенным нами руководством MTE 29 (Таблица 2). Маневр считался успешным, если пилот смог выполнить его в пределах параметров, классифицированных как «желательные» или «адекватные», без механического или словесного вмешательства инструктора.
Таблица 2 Элемент задачи полета (MTE) для авторотации, адаптированный из ADS-33. Используется для оценки рабочей нагрузки.Чтобы лучше определить HQR каждой задачи, пилоты выполняли маневры методом «пилот-в-петле», и им было предложено выполнить маневр без особых навыков пилотирования, т. Е. Выполнить маневр в те же условия эксплуатации, которые типичны для учебного полета вертолета. Инженеры-испытатели, которые координировали выполнение полетов, были проинструктированы проводить анализ оценки HQR каждого маневра, побуждая пилотов комментировать все свои впечатления от выполнения задачи.Таким образом, пилоты дополнительно уточнили оценки HQR с помощью списка важных характеристик, таких как поле зрения, вибрация, турбулентность, а также наиболее часто используемые смещения органов управления полетом и возможные колебания, вызванные пилотом (PIO), как рекомендовано ADS. -33 Руководство по тестированию 34 .
Пилоты получили указание попробовать желаемые характеристики. В случае невозможности проведения маневра это повторяли для достижения хотя бы адекватных характеристик. Все участники прошли предварительную подготовку на авиасимуляторах и реальных самолетах.
Хотя это и не является обычным явлением, если пилоту удавалось достичь желаемых характеристик даже при высокой рабочей нагрузке, использовалась оценка HQR = 4.5. Эта методика часто используется в летных испытаниях в Бразилии и представлена в руководствах EFEV 3 , а также в руководствах по испытаниям BIUG 27 и ADS-33 33 . Этот Стандарт рекомендует два дополнительных критерия: первый требует, чтобы задачи выполнялись как минимум тремя пилотами-испытателями (желательно пять) с опытом выполнения этой задачи, а второй указывает, что стандартное отклонение HQR должно быть уменьшено с предварительным обучением пилоты в задачах.Мы приняли предел отклонения в 1 единицу HQR среди оценок пилота.
Мы оценили уровень успеха (SR) каждой группы, учитывая: (а) все контрольные точки; (б) только разумные баллы (предельные и за пределами). Кроме того, фиксировалось время реакции пилотов на каждый маневр. Реакция была определена как интервал между смоделированным отказом двигателя и началом реакции пилота на органы управления полетом, особенно при понижении коллективного управления.
Количественная оценка управления полетом: совокупная частота мощности
Важным критерием, который следует оценивать при разработке самолета, являются летные качества, определяемые Падфилдом как: «легкость и точность, с которой пилот может выполнять задачи, необходимые для поддержки самолета. роль самолета » 5 .Один из возможных способов оценки этих летных качеств связан с частотой и амплитудой, с которой пилот использует команды полета самолета. В этом смысле во время сценариев с более высокой рабочей нагрузкой, таких как авторотация, эти входные данные могут представлять большие смещения, которые переводятся в более высокие частоты и / или большие амплитуды, применяемые к органам управления полетом.
Набор параметров, широко оцениваемых во время полета, — это время действия пилота при манипулировании или активации органов управления полетом, а также амплитуда и частота каждого входного сигнала.Когда пилоты используют более крупные и высокочастотные входные сигналы управления полетом, они должны активно учитывать, когда, как и где эти входные данные должны быть внесены для выполнения требуемой задачи с удовлетворительным уровнем производительности и безопасности. В этом смысле во время сценариев с более высокой нагрузкой входные команды представляют большие смещения, которые переводятся в более высокие частоты и большие амплитуды, применяемые к органам управления полетом.
Для количественной оценки характеристик управления полетом мы использовали алгоритм суммарной частоты мощности (CPF) 35 , используя управляющие смещения, связанные с четырьмя осями управления полетом вертолета: коллективной, циклической (продольной и поперечной) и педалями. .Чтобы определить производительность, CPF каждой оси управления был рассчитан отдельно, используя уравнение. (1) и сумма его результатов для четырех осей, которые представляли CPF, который объединяет информацию от всех органов управления полетом в один параметр и не учитывает участие каких-либо органов управления вертолетом. Это согласуется с деятельностью пилотирования вертолета, которая не предусматривает ни предпочтительной оси управления, ни сцепления осей управления.
$$ {\ omega} _ {cum} = \ frac {{\ omega} _ {cutoff} \ cdot \ frac {1} {2 \ pi} {\ int} _ {0} ^ {\ infty} { G} _ {\ delta \ delta} \ cdot d \ omega} {10} $$
(1)
где \ ({\ omega} _ {cum} \) — совокупная частота мощности одной оси управления во временном окне.\ ({\ omega} _ {cutoff} \) — частота среза во временном окне; и \ ({G} _ {\ delta \ delta} \) — совокупная энергия в частотном диапазоне во временном окне.
Этот показатель был получен из так называемой метрики промышленной частоты 36 , которая представила эффект совокупной энергии по всему диапазону частот в движущемся временном окне 3 с, чтобы уменьшить влияние пилот-сигнала на значения промышленной частоты. 35 .
Этот инструмент был позже адаптирован для процесса оценки рабочей нагрузки для задач захода на борт и посадки и использовал только результаты полетов, выполненных на тренажерах.Это предыдущее исследование было успешным в прогнозировании эксплуатационных ограничений для судов и вертолетов (SHOL) на основе прогнозов пилотной модели и определенных границ между допустимыми и неприемлемыми рабочими нагрузками, согласно результатам 35 кумулятивной частоты мощности.
В основном, CPF коррелирует частоту, представленную частотой среза, и интенсивность входного пилот-сигнала на одной конкретной оси, которая представлена уровнем совокупной энергии во всем частотном диапазоне, временные окна и более высокие значения относятся к увеличено количество команд, подаваемых на органы управления самолетом 25 .
Первоначально мы вычислили CPF каждого авторотации, выполненной каждым пилотом. Это измерение было вычислено в интервале от 5 с до отказа двигателя до 15 с после него. Впоследствии эти результаты были объединены в группы с учетом среднего значения точек, использованных в анализах.
Физиологические данные
Несколько физиологических датчиков были прикреплены к телам пилотов во время полета, и данные были записаны с помощью электроэнцефалограмм (EEG) (активный канал LiveAmp 32, Brain Products), электрокардиограмм (EKG) (адаптер BIP2AUX Gain 100, Brain Products), а также электродермальную активность кожи (EDA) (модуль GSR, Brain Products), частоту дыхания (респираторный пояс, Brain Products) и движения глаз (трекер Tobii Pro Glasses 2).Все датчики, кроме движений глаз, регистрировались с частотой 500 Гц с помощью усилителя ЭЭГ и соединительной коробки (Live Amp Sensor & Trigger Extension, Brain Products), и они синхронизировались с бортовыми приборами для летных испытаний с помощью кнопки, срабатывающей при каждый маневр. Здесь мы сообщаем об проанализированных данных от EDA, а также о частоте сердцебиения и дыхания пилотов. Данные ЭЭГ представлены в другом месте 37 .
Первоначально, для визуальных целей, необработанные сигналы EDA были сегментированы вокруг каждого отказа двигателя (от — 60 с до 60 с) и нормализованы по средним значениям, вычисленным за 5 с до отказа двигателя.Мы представили средние осциллограммы в разделе результатов. Соответствующая статистика была рассчитана с использованием линейной модели смешанного эффекта, как описано в следующем разделе. Для статистического анализа для оценки была выбрана амплитуда первых пиков после события (рис. 3а). Мы связали эти пики с отказом двигателя только в том случае, если реакция возбуждения была инициирована в интервале 0,5–5 с, как рекомендовано в ранее опубликованных исследованиях 38 .
Рисунок 3(a) Пример реакции проводимости кожи после отказа двигателя. (b) Обнаружение пиков и вычисление частоты пульса. (c) Пример дыхательной скалограммы при отказе двигателя. (d) Увеличьте масштаб спектрограммы на интересующей частоте и рассчитанной промежуточной частоте. Синий цвет означает самое низкое значение магнитуды, а красный — самое высокое. Пример 3 физиологических сигналов для полного полета. (e) EDA, (f) частота сердечных сокращений и (g) промежуточная частота дыхания. Красные вертикальные линии — неисправности двигателя.
Что касается ЭКГ, то сигналы изначально подвергались полосовой фильтрации (1–100 Гц — нулевая фаза, рис. 3b), и мы полуавтоматически идентифицировали R-пики. Последовательно мы вычислили частоту сердечных сокращений. Учитывая разные базовые частоты в начале каждого маневра, мы нормализовали частоту сердечных сокращений на среднее значение 5-секундного окна до отказа двигателя. После этого мы постоянно наблюдали модуляцию частоты сердечных сокращений, состоящую из двух пиков в качестве средних результатов для всех маневров в течение 40 с после отказа двигателя.Поэтому, чтобы количественно оценить это изменение, мы вычислили для каждого маневра площадь под кривой (AUC) процентного изменения и использовали это значение для расчета статистики с помощью линейной смешанной модели.
Наконец, записи дыхания были подвергнуты полосовой фильтрации (0,05–0,50 Гц, нулевая фаза), и мы попытались охарактеризовать его ритмическую частоту. Мы рассчитали спектральную активность сигнала с помощью вейвлет-преобразования с использованием ядра Морле. Из-за временной неопределенности около пределов сигнала, особенно для низких частот (рис.3c), мы приняли окно от -100 до 100 с вокруг каждого отказа двигателя, чтобы вычислить частоту в диапазоне 0,05–0,50 Гц от -50 до 50 с вокруг отказа двигателя. Для каждого момента мы нормализовали среднюю мощность каждой полосы частот на общую спектральную мощность в то время, что привело к заранее заданной частоте (рис. 3) — (a) Пример реакции проводимости кожи после отказа двигателя. (b) Обнаружение пиков и вычисление частоты сердечных сокращений. (c) Пример дыхательной скалограммы при отказе двигателя.{0.50} {Spectral \, Power} _ {i, t}} $$
(2)
Статистический анализ
Мы протестировали модуляцию каждой интересующей характеристики (совокупная частота мощности, электродермальная активность и частота пульса) на предполагаемых разделах диаграммы высота-скорость с моделями линейно-смешанного эффекта (LME). Каждая модель начиналась только с перехвата и случайных эффектов, а затем групповое (Group1, Group2 или Group3), классическое (Inside, Line или Outside) или предлагаемое (Cruise, High-hover, Take-off или Knee) разделение диаграмма была добавлена во вторую модель.Этот новый параметр сохранялся в модели, если он уменьшал информационный критерий Акаике (AIC), и он был статистически значимым после теста ANOVA 39 . Остаточное распределение всех моделей оценивалось по распределению Гаусса, и в случае отклонения нулевой гипотезы к выражению модели применялся логарифмический оператор.